[CUDA#3] CUDA Optimization | TensorCore
NVIDIA GPU架构演进及其优化技术,重点分析了Kepler、Maxwell、Pascal和Volta架构的核心特点。Kepler架构采用SMX单元设计,而Maxwell/Pascal架构则优化为SMM单元,大幅提升了能效比。特别值得注意的是Volta架构引入了革命性的TensorCore,专为AI矩阵运算优化,通过并行化矩阵乘法运算使AI训练效率提升数十倍,成为推动深度学习发展的关键硬件创新
CUDA Optimization (Part 1)
大纲
介绍适用于NVIDIA GPU的架构(如Kepler、Maxwell等系列)
内核优化(如线程启动配置)以及后续关于全局内存吞吐量、共享内存访问等内容
这些概念对各类NVIDIA GPU上的CUDA语言/API实现都适用。
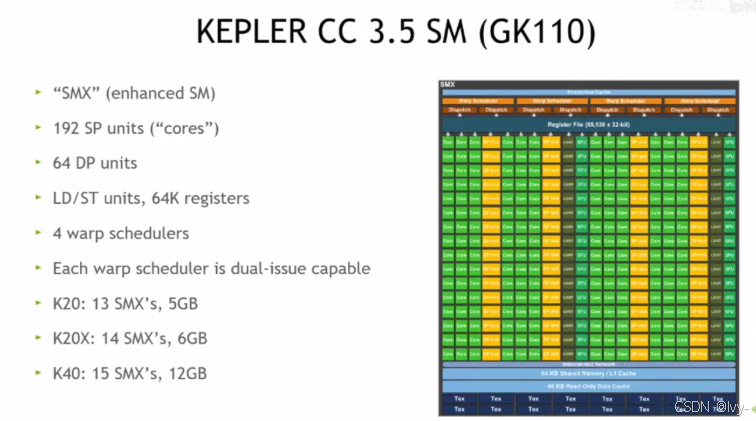
NVIDIA Kepler架构
(计算能力3.5,GK110核心)的流式多处理器(SM)结构
包含增强型SM单元(SMX)、192个单精度核心、64个双精度核心、存储访问单元、64K寄存器、4个双发射 warp 调度器,还列举了K20、K20X、K40等型号的SMX数量和显存配置
从编程角度展示了该GPU架构的硬件资源情况。
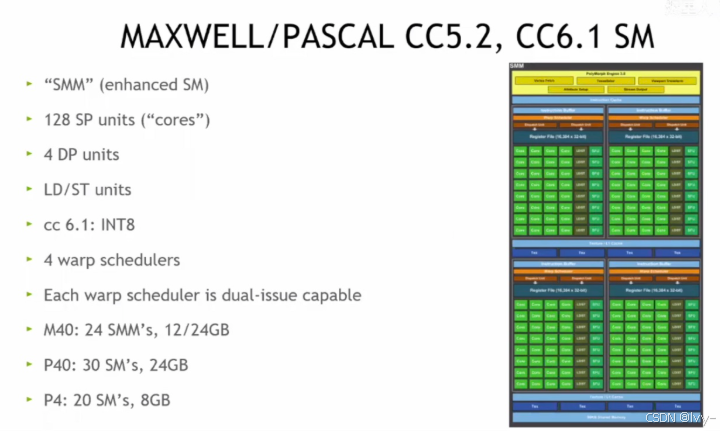
NVIDIA Maxwell/Pascal架构
(计算能力5.2、6.1)的流式多处理器(SM)结构
其增强型SM单元(SMM)、128个单精度核心、4个双精度核心等硬件资源,以及M40、P40、P4等型号的SMM/SM数量和显存配置
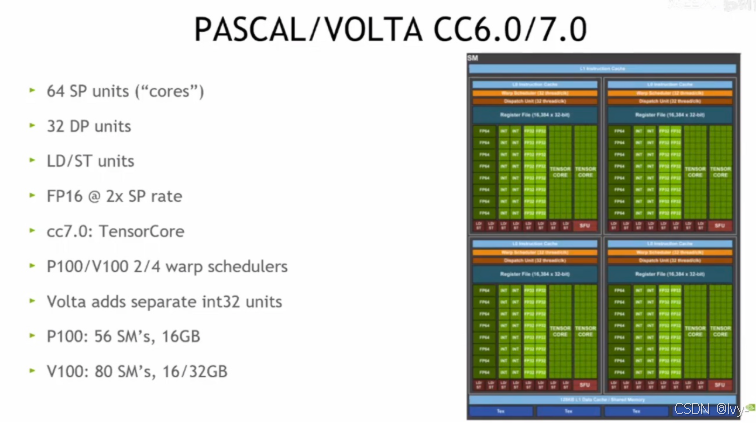
NVIDIA Pascal/Volta架构
(计算能力6.0/7.0)的流式多处理器(SM)结构
64个单精度核心、32个双精度核心、存储访问单元等硬件资源,Volta架构还包含TensorCore和独立int32单元,同时列举了P100、V100等型号的SM数量和显存配置
对比
| 架构维度 | Kepler(CC3.5) | Maxwell/Pascal(CC5.2/6.1) | Pascal/Volta(CC6.0/7.0) |
|---|---|---|---|
| 计算核心 | -192 个 SP(单精度)核心-64 个 DP(双精度)核心 | -128 个 SP 核心-4 个 DP 核心 | -64 个 SP 核心-32 个 DP 核心-Volta 加入 TensorCore(AI 计算加速) |
| 调度与执行 | -4 个双发射 warp 调度器 | -4 个双发射 warp 调度器 | -P100/V100 为 2/4 个 warp 调度器-Volta 新增独立 int32 单元 |
| 内存与型号 | -K20(13SMX,5GB)、K20X(14SMX,6GB)、K40(15SMX,12GB) | -M40(24SMM,12/24GB)、P40(30SM,24GB)、P4(20SM,8GB) | -P100(56SM,16GB)、V100(80SM,16/32GB) |
| 优劣分析 | -优势:双精度性能强,适合科学计算类高密度浮点任务;-劣势:功耗较高,架构相对老旧,在 AI 等新场景支持不足。 | -优势:功耗控制优秀,单精度能效比提升,适合通用计算与轻量图形任务;-劣势:双精度性能大幅削弱,对超算类场景支持不足。 | -优势:Volta 的 TensorCore 使 AI 训练 / 推理性能爆发,架构灵活性和能效比进一步优化;-劣势:Pascal 版本双精度仍弱于 Kepler,架构设计更偏向新型计算场景(如 AI),传统科学计算场景适配需权衡。 |
Kepler 胜在双精度算力,适合传统科学计算
Maxwell/Pascal 赢在能效,适合通用计算
Pascal/Volta(尤其是 Volta)靠 TensorCore 在 AI 领域封神,是人工智能时代的架构先锋。
AI 计算的需求和TensorCore 的设计优势两方面来拆解:
1. AI 任务的核心计算模式:矩阵乘法
人工智能(尤其是深度学习)的核心操作是矩阵乘法,比如神经网络中的卷积、全连接层,本质都是大量的矩阵运算。以一个简单的神经网络为例,输入数据是一个矩阵,权重也是一个矩阵,两者相乘才能得到输出 —— 而这样的运算在深度神经网络中会被重复数十亿次。
2. 传统 GPU 核心的 “力不从心”
普通的 GPU 核心(如之前提到的 SP 单元)是为通用计算设计的,它可以处理各种类型的计算任务,但在矩阵乘法这种 “重复性极高、模式很固定” 的运算上,效率并不够。打个比方,传统核心就像 “全能手”,什么活都能干,但干 “流水线式的矩阵乘法” 时,会有很多资源被浪费。
3. TensorCore 的 “精准打击”
TensorCore 是专门为矩阵乘法和累加操作量身定做的硬件单元。它就像一个 “矩阵乘法专用工厂”:
- 它可以把多个数据打包在一起,一次性完成大量的矩阵乘法 + 累加,效率比传统核心高几十倍甚至上百倍。
- 比如在深度学习中,训练一个大模型时,TensorCore 能让原本需要几天的计算,压缩到几小时甚至更短。
4. Volta 架构的 “封神” 逻辑
Volta 是第一个大规模集成 TensorCore 的 GPU 架构,它相当于给 AI 计算装上了 “涡轮增压发动机”:
- 以前用普通 GPU 训练 AI 模型,又慢又贵;有了 TensorCore 后,训练速度飙升,成本大幅降低,这直接推动了人工智能从 “实验室技术” 走向 “产业级应用”(比如 ChatGPT 这类大模型的训练,就依赖大量带 TensorCore 的 GPU)。
- 这种 “为 AI 计算定制硬件” 的思路,让 Volta 成为人工智能时代的架构标杆,后续的 GPU(如 Turing、Ampere)也都在这个基础上持续升级 TensorCore 的能力。
总结:因为 AI 最核心的计算是矩阵乘法,而 TensorCore 是专门用来高效做矩阵乘法的 “超级加速器”,Volta 把它大规模用上后,AI 训练和推理的速度、效率都迎来了质变,所以成了 AI 领域的 “封神之作”~
CUDA执行模型
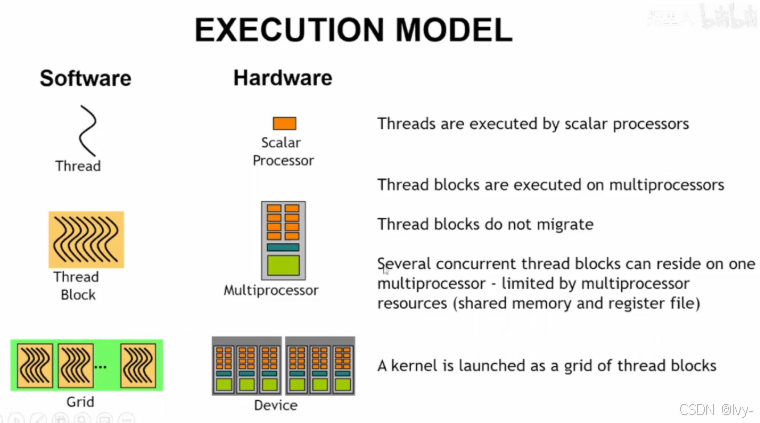
软件层面的线程、线程块、网格与硬件层面的标量处理器、多处理器、设备之间的对应关系,解释了线程由标量处理器执行、线程块在多处理器上运行且不迁移、一个内核以线程块网格形式启动等CUDA程序执行的核心逻辑
CUDA中Warp(线程束)
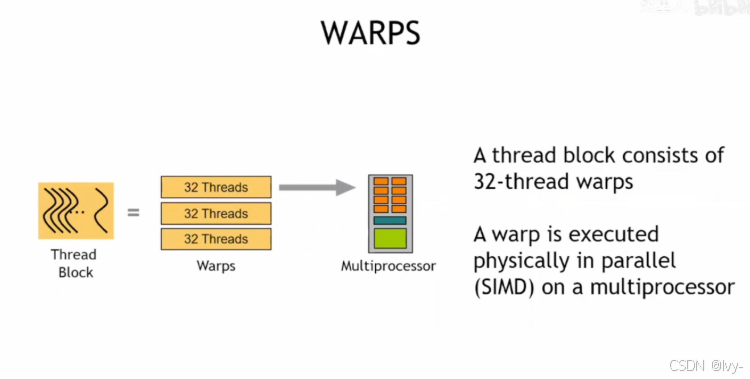
线程块由32线程的Warp组成,Warp在多处理器上以SIMD(单指令多数据)方式物理并行执行,是CUDA并行计算的底层执行单元之一
这就像学校组织活动,“Warp(线程束)” 是为了让 GPU 的并行计算更高效、更有秩序而设置的 “分组管理单元”,我们可以从这几个角度理解:
- GPU 硬件的 “执行习惯”
GPU 的==标量处理器(处理核心)是按 “一批 32 个线程==的模式来执行指令的。就好比食堂打饭,窗口一次能同时给 32 个人打饭(硬件设计如此),所以得把线程先分成每 32 个一组(Warp),才能匹配硬件的执行节奏。
- 让并行计算更 “高效”
如果没有 Warp,线程是 “零散执行” 的,会导致硬件资源大量浪费。而 Warp 把 32 个线程捆成一组,让硬件能 “一次性处理一批”,就像工厂流水线一次性加工 32 个零件,效率直接拉满。
- 解决 “线程执行不同步” 的问题
在并行计算中,线程之间可能会有 “分支”(比如 if-else 逻辑)。Warp 的存在能让同组的 32 个线程尽可能同步执行—— 就算有分支,也能通过 “统一调度” 减少性能损耗,保证整体执行的流畅性。
简单来说,Warp 是为了适配 GPU 硬件的执行模式,让大量线程的并行计算既高效又有序,是 CUDA 实现高性能并行的 “底层小助手”
CUDA启动配置
按序发指令、线程阻塞时切换线程隐藏延迟(如全局内存延迟超100周期、算术操作延迟不足100周期),最终需启动足够线程来隐藏延迟以实现高效执行。
GPU 如何通过指令执行流程隐藏延迟以提升性能?
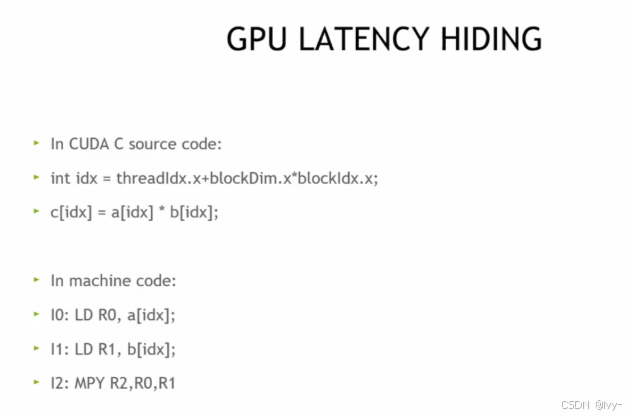
(CUDA C 源码中数组元素相乘,机器码中先加载操作数再乘法)
GPU在流式多处理器(SM)内部通过切换不同Warp(线程束)来隐藏指令执行延迟的过程,以内存加载和乘法指令为例,说明在一个Warp等待操作数时,GPU会调度其他Warp执行,从而保持硬件持续高效运行。
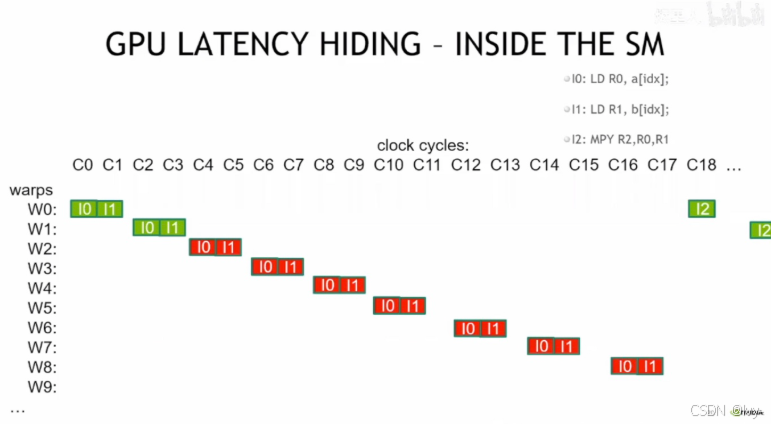
GPU“延迟隐藏”的原理:当一个Warp(线程束)在执行内存加载(I0、I1)这类有延迟的操作时,GPU会切换到其他Warp继续执行,以此让硬件一直保持忙碌,不会因为等待延迟而空闲
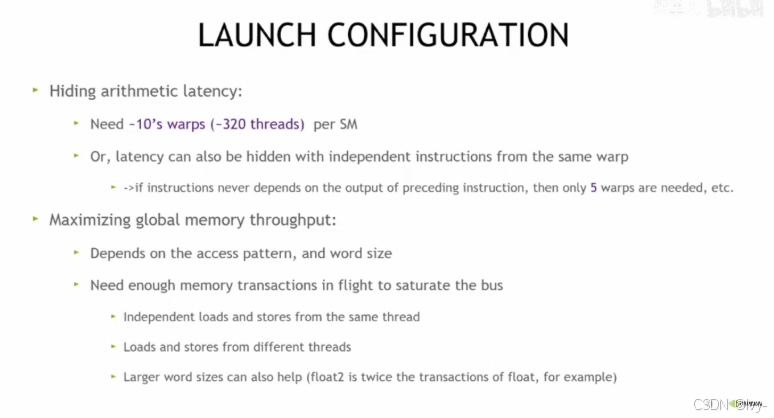
每 SM 约 10 个 Warp(约 320 线程)隐藏算术延迟,以及通过优化内存访问模式、字长等方式最大化全局内存吞吐量的策略
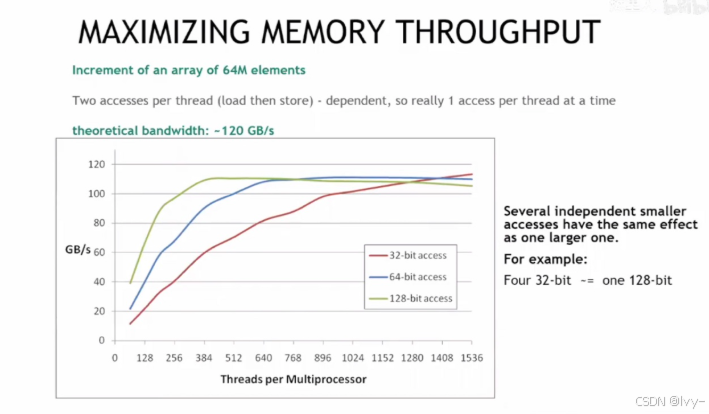
CUDA 中最大化内存吞吐量
以 64M 元素数组递增为例,说明通过不同位宽(32/64/128 位)的内存访问,以及多线程并发访问,可使理论带宽接近 120GB/s,同时独立小访问可等效于大访问以优化吞吐量。
GPU 通过多 Warp 切换实现的 “延迟隐藏”,本质就是一种异步并行的 “各司其职”
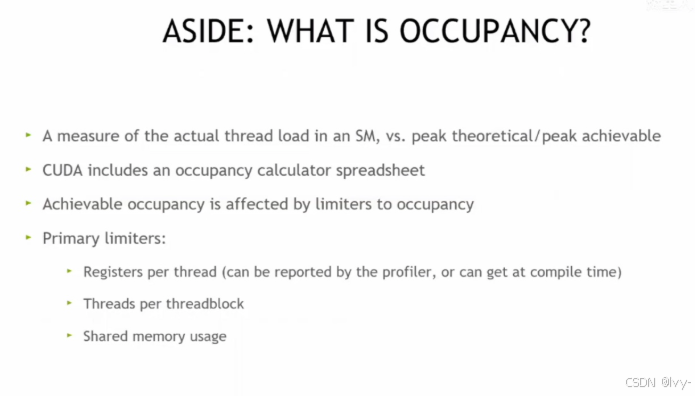
CUDA 中 “占用率(Occupancy)”
它是衡量流式多处理器(SM)实际线程负载与理论峰值负载的指标,受每线程寄存器数、线程块线程数、共享内存使用等因素限制,CUDA 还提供占用率计算器辅助分析。
CUDA优化总结
GPU是大规模线程并行且具备延迟隐藏的设备,需通过每SM启动足够线程、足够线程块来加载GPU,并借助分析/剖析工具(如Nsight Compute)进行优化。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 16
16 0
0- 0



 已为社区贡献82条内容
已为社区贡献82条内容

所有评论(0)