6G关键技术揭秘:空天地海一体化网络,从“地面联网”到“全球智联”
一、引言
如果你关注过5G,应该还记得当时大家常说的一个词:“万物互联”。5G确实让我们的连接从手机延伸到了工厂、矿山、港口,但仔细想想,它说的“万物”其实还是局限在地球表面上——基站、光纤、数据中心,无非是把地面这张网织得更密、更快。
但真正的世界,从来不只是地面那一层。
海洋占据了地球71%的面积,天空中有成千上万架飞机和无人机,而头顶400公里到3.6万公里的轨道上,数以万计的卫星正在运转。 如果我们只在地面建基站,那还是把地球上绝大部分空间排除在了“联网”之外。
所以6G提出了一个宏大得多的愿景:空天地海一体化网络。它要把天基、空基、地基、海基四层网络彻底打通,组成一个覆盖全球每一个角落的超级通信系统。
说实话,我第一次读到这个概念的时候,脑子里浮现的不是技术架构图,而是一件非常直观的事:假如你在太平洋中心的货轮上遇到紧急情况,靠5G基站显然不行,但通过卫星和无人机的中继,你就能和万里之外的医疗专家实时视频。 这就是空天地海一体化网络想做的事情——让任何人在任何地点、任何时间,都能获得高质量的通信和计算服务。
二、从5G到6G:从“地面一张网”到“立体万物智联”
我们先回到5G时代。
5G其实已经在前瞻性地研究了“非地面网络”,也就是NTN(Non-Terrestrial Network)技术。简单来说,5G的NTN试图让卫星接入5G网络,但这个阶段,卫星的功能更像是“基站的延伸”——一个悬浮在太空中的中继器。
举个例子:5G NTN标准主要定义了两种场景:
- 透明载荷模式:卫星只是把地面基站发来的信号转发下去,类似于一个“太空信号放大器”。
- 星上处理模式:卫星有一定的处理能力,但仍以转发为主,处理能力有限。
换句话说,5G的空天地一体化还停留在“把卫星当作一个能飞的基站”,天基、空基、地基网络之间仍然是相对独立的,缺乏深度的融合和协同。
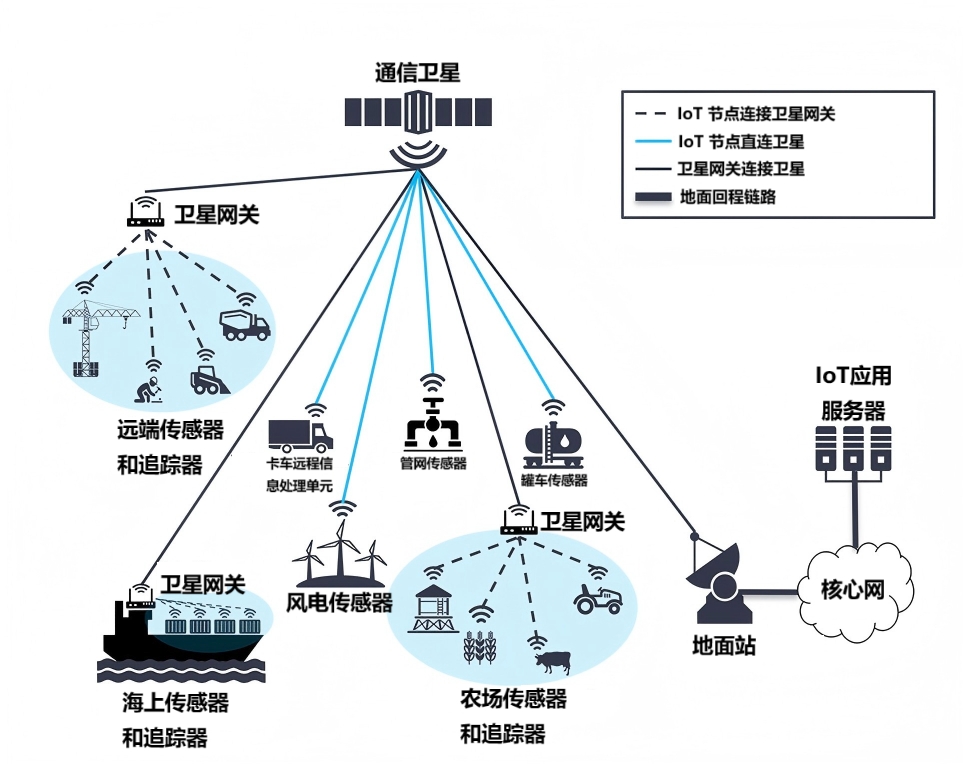
图1 基于卫星的万物互联示意图
这张图展示了卫星网络如何连接分布在世界各地的传感器和设备。从建筑工地的重型机械、农田里的牲畜追踪器,到海上的油轮、风电场和远程卡车,都能通过卫星网关或直连卫星的方式接入网络。图中清晰标明了“节点直连卫星”、“节点连接卫星网关”等四种链路类型,直观呈现了卫星物联网的端到端连接逻辑。
到了6G,形势完全不同了。ITU(国际电信联盟)在2023年发布的《IMT面向2030及未来发展的框架和总体目标建议书》中,明确了6G的六大应用场景,其中就包括泛在连接。这个“泛在”不是口号,而是覆盖空、天、地、海、深空的立体覆盖。
从“卫星做基站的延伸”到“天基、空基、地基、海基深度融合成一个有机整体”,这就是核心区别。
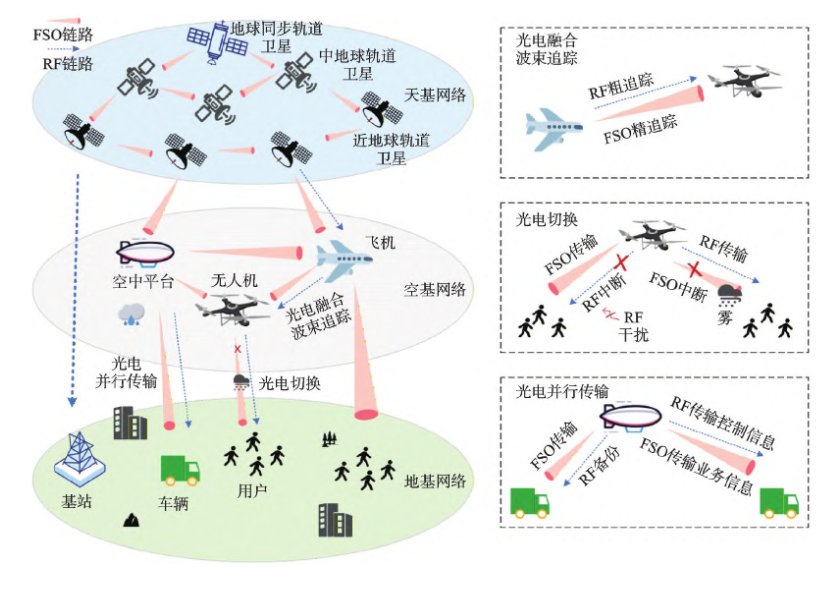
图2 空天地一体化网络中的光电融合通信架构
这张图以三层结构(天基网络、空基网络、地基网络)展示了空天地一体化网络的完整架构。图中用不同颜色区分了RF链路和FSO(自由空间光通信)链路,并特别展示了三种光电融合的应用场景:波束追踪(RF粗追踪+FSO精追踪)、天气切换(FSO断则切RF,RF受干扰则切FSO)、以及并行传输(FSO传大容量业务,RF传输控制指令),体现了系统在复杂环境下的灵活性与可靠性。
那么,为什么6G能做到而5G做不到?三个字:资源融合。
5G的设计是以“连接”为中心,网络只管数据传输。而6G的设计理念是以“任务”为中心,连接只是手段,计算、感知、数据、智能才是网络的核心能力。这就意味着,6G的网络架构天然具备融合多种异构网络、统一调度的基因。
三、空天地海一体化究竟是什么?一个三位一体的“立体网络”
为了让大家有一个直观的理解,我画了一个“三层”的思维模型:
第一层:地基网络——就是我们熟悉的移动通信网,包括5G/6G基站、光纤骨干网、数据中心等。它的特点是低时延、大带宽、高可靠,但覆盖范围有限,主要集中在城市和人口密集区。
第二层:空基网络——包括无人机、飞艇、高空平台。它们的优势是灵活部署、机动性强,可以根据需要快速升空,提供临时的通信覆盖或增强。无人机可以作为空中“流动基站”,在应急场景、偏远地区提供边缘计算服务。
第三层:天基网络——包括高轨、中轨、低轨卫星。低轨卫星星座(如SpaceX的Starlink、我国的“千帆”星座)可以提供全球覆盖,而高轨卫星(如通信广播卫星)则提供区域性大容量服务。
第四层:海基网络——包括海上浮标、船舶平台、海底监测节点。海洋不再是通信盲区,而是通过卫星+无人机+海上自组织网络实现连接。
把这张图画出来后,你就能发现,空天地海一体化网络不是简单的“加一层卫星”,而是通过统一架构把四层网络调度成一张智能、协同、自适应的统一网络。
《面向空天地一体化网络的数字孪生系统架构》https://kns.cnki.net/kcms2/article/abstract?v=InoXwbPQWppqiCTO8RAGDzimw7t97-kjCyrJl0F5Vcml97zG1eqiQ2874hZ7m6Kw5qxarT2t_BDuvWETNVjluwigddil4t1X12xN0C3b5Nnl-bKxKFZkkw0PL3snuQE57JyrlVzmrEdj7KFDh2wKEKF5310YJxiw&uniplatform=NZKPT中提出了一种五维数字孪生模型(PE、VE、Ss、DD、CN),精准地描述了物理实体、虚拟实体、孪生数据、孪生服务和连接关系之间的内在逻辑。说实话,这个模型让我意识到,空天地海一体化网络的难点不在于“建一个新网络”,而在于“把已有的好几个网络在虚拟世界统一管理、调度和优化”。数字孪生技术正是解决这一问题的关键。
四、如何实现?一个“四层架构”的路径
那么,从技术实现的角度,空天地海一体化网络是如何搭建的?
王友祥、唐雄燕在《6G网络架构和关键技术展望》中提出了一个四层架构,我觉得非常清晰:
第一层:资源层——物理基础设施,包括计算资源(服务器、边缘节点)、网络资源(交换设备、频谱)、存储资源、频谱资源等。
第二层:功能层——按功能划分为控制面、用户面、数据面、计算面。这个“四面”的设计是6G架构的一大创新,它把连接、计算、数据、智能内生化到了网络架构中,而不是像5G那样“外挂”式地加塞。
第三层:管控层——这是整个网络的“大脑”,负责服务编排、网络调度、用户治理、数字孪生。“数字孪生”在这里扮演的角色非常关键——它建立起物理网络的虚拟映射,允许我们在虚拟空间中对各种调度策略进行预先仿真和优化。
第四层:服务层——向上提供连接服务、算力服务、数据服务、AI服务等能力开放。
整条路径的逻辑其实是:感知物理世界 → 数字化建模 → 智能决策 → 指令执行 → 反馈闭环。这和人类做决策的流程是一模一样的。
另外,吴启晖等人在《面向6G的空天地一体化网络的光电融合传输技术》中提出了一个非常有意思的设计——IOR-CSDN体系架构。在这个架构中,他们引入了“控制链+业务链分离”的设计理念:
- 控制信息走RF链路(高可靠、抗干扰)
- 业务数据走FSO自由空间光链路(大带宽、低时延)
这一设计的精妙之处在于,它让两种物理特性截然不同的通信方式分工合作,各取所长。“控制链+业务链”分离的设计,也让我想到了人类协作中的“领导决策+执行落地”——射频链路负责“发号施令”、光链路负责“搬运货物”。
五、底层算法和代码:模拟一个空天地海一体化网络
理论说了这么多,我们来点实际的。
在空天地海一体化网络中,一个核心问题是任务卸载和资源调度。具体来说,地面的终端用户(比如海洋上的船只或偏远山区的传感器)需要把计算任务卸载到无人机或低轨卫星上处理,如何选择传输链路?如何分配带宽和算力?如何在动态环境下自动优化?
李斌等人在《面向空天地异构网络的边缘计算部分任务卸载策略》中提出了一种“三阶段交替优化算法”:
- Step 1:用户-无人机匹配关联——每个用户选择连接哪一架无人机。
- Step 2:计算任务与带宽分配——确定本地计算多少、卸载到无人机多少、卸载到卫星多少。
- Step 3:无人机轨迹与计算资源优化——规划无人机的飞行轨迹,同时调整其CPU计算资源的分配。
这里有一段简化版的Python代码,模拟这个优化过程的核心逻辑:
"""
空天地海一体化网络:任务卸载与资源调度模拟器
功能:模拟一个终端用户(如船只)向3架无人机和1颗低轨卫星卸载计算任务的过程
核心算法:三阶段交替优化(匹配、分配、轨迹)
"""
import numpy as np
import matplotlib.pyplot as plt
# ==================== 参数设置 ====================
np.random.seed(42)
# 用户位置(假设在海面上)
user_pos = np.array([500, 500])
# 3架无人机初始位置(在200m高度飞行)
M = 3 # 无人机数量
uav_pos = np.array([
[200, 200, 200],
[800, 300, 200],
[400, 700, 200]
], dtype=float)
# 卫星位置(低轨卫星,高度1200km,简化用2D表示)
sat_pos = np.array([0, 0])
# 任务数据
D_total = 50 # 总任务量 (Mbit)
C = 4000 # 每比特所需CPU周期数
f_local = 2e9 # 本地计算频率 (2 GHz)
kappa = 1e-28 # CPU能耗系数
T_max = 10 # 最大允许时间 (s)
# 通信参数
B = 50e6 # 带宽50MHz
noise = 1e-9 # 噪声功率
P_uav = 0.05 # 用户到UAV的发射功率 (W)
P_sat = 1.0 # 用户到卫星的发射功率 (W)
H = 200 # UAV飞行高度 (m)
d0_gain = 1e-3 # 参考信道增益
def distance(p1, p2):
"""计算两点之间的欧氏距离(支持2D或3D坐标)"""
return np.linalg.norm(p1 - p2)
def channel_gain(dis, H=0):
"""计算信道增益(简化的自由空间模型)"""
return d0_gain / (dis**2 + H**2)
def compute_rate(P, gain, B, noise):
"""计算香农容量"""
snr = P * gain / noise
return B * np.log2(1 + snr)
# ==================== 阶段一:用户-无人机匹配关联 ====================
print("=" * 60)
print("阶段一:用户-无人机匹配关联")
print("=" * 60)
# 计算到各无人机的信道增益和传输速率
rates_uav = []
for m in range(M):
dis = distance(user_pos, uav_pos[m, :2])
gain = channel_gain(dis, H)
rate = compute_rate(P_uav, gain, B/3, noise)
rates_uav.append(rate)
print(f"UAV-{m+1}: 距离={dis:.1f}m, 速率={rate/1e6:.2f}Mbps")
# 选择最佳无人机(速率最大)
best_uav = np.argmax(rates_uav)
print(f"\n→ 用户选择关联 UAV-{best_uav+1}(速率最优)")
# ==================== 阶段二:任务分配与带宽分配 ====================
print("\n" + "=" * 60)
print("阶段二:计算任务分配")
print("=" * 60)
# 计算到卫星的距离和速率
dis_sat = distance(user_pos, sat_pos) + 1000
gain_sat = channel_gain(dis_sat, H=1200000)
rate_sat = compute_rate(P_sat, gain_sat, B, noise)
print(f"到卫星的传输速率: {rate_sat/1e6:.2f}Mbps")
# 简单贪婪分配:先用本地,剩余平均分给UAV和卫星
D_local = min(D_total * 0.3, f_local * T_max / C) # 本地能完成的最大任务量
D_uav_max = rates_uav[best_uav] / 1e6 * T_max * 0.5 # 可以卸载到UAV的最大量(含计算时间)
D_sat = max(0, D_total - D_local - D_uav_max)
# 确保总和不溢出
D_local = min(D_local, D_total)
D_uav = min(D_uav_max, D_total - D_local)
D_sat = D_total - D_local - D_uav
print(f"本地计算: {D_local:.1f} Mbit")
print(f"卸载到UAV: {D_uav:.1f} Mbit")
print(f"卸载到卫星: {D_sat:.1f} Mbit")
# ==================== 阶段三:无人机轨迹优化(简化版) ====================
print("\n" + "=" * 60)
print("阶段三:无人机轨迹优化(连续凸逼近简化实现)")
print("=" * 60)
# 初始化
T = 10 # 周期长度(s)
N = 20 # 时隙数量
dt = T / N
V_max = 15 # 最大速度 (m/s)
# 记录轨迹
trajectory = np.zeros((M, N, 2))
for m in range(M):
start = uav_pos[m, :2].copy()
traj = [start]
# 简单优化:朝向用户方向移动
direction = user_pos - start
dist_total = np.linalg.norm(direction)
direction_unit = direction / dist_total if dist_total > 0 else np.array([1, 0])
# 按最大速度飞行,逐渐靠近用户
for n in range(1, N):
# 当前到用户的距离
current_pos = traj[-1]
current_dist = distance(current_pos, user_pos)
if current_dist > 50:
# 朝向用户移动
step = direction_unit * V_max * dt
new_pos = current_pos + step
else:
# 在用户附近盘旋
angle = 2 * np.pi * n / N
offset = np.array([50 * np.cos(angle), 50 * np.sin(angle)])
new_pos = user_pos + offset
traj.append(new_pos)
trajectory[m] = np.array(traj)
print(f"UAV-{m+1} 轨迹已优化: 从{start} → 终点{traj[-1]}")
# ==================== 能耗计算 ====================
print("\n" + "=" * 60)
print("能耗统计与分析")
print("=" * 60)
# 本地计算能耗
E_local = kappa * (f_local**2) * D_local * 1e6 * C
print(f"本地计算能耗: {E_local:.4f} J")
# UAV计算能耗
f_uav = min(10e9, D_uav * 1e6 * C / T_max) # 分配的计算频率
E_uav_compute = kappa * (f_uav**2) * D_uav * 1e6 * C
print(f"UAV计算能耗: {E_uav_compute:.4f} J")
# 卫星传输能耗
E_sat = P_sat * (D_sat * 1e6 / rate_sat)
print(f"卫星传输能耗: {E_sat:.4f} J")
# 总能耗
E_total = E_local + E_uav_compute + E_sat
print(f"\n系统总能耗: {E_total:.4f} J")
print(f"系统总吞吐量: {D_total:.1f} Mbit")
print(f"能效: {D_total / E_total:.4f} Mbit/J")
# ==================== 可视化 ====================
plt.figure(figsize=(10, 8))
for m in range(M):
plt.plot(trajectory[m, :, 0], trajectory[m, :, 1],
label=f'UAV-{m+1}轨迹', linewidth=2)
plt.scatter(trajectory[m, 0, 0], trajectory[m, 0, 1],
marker='s', s=100, label=f'UAV-{m+1}起点')
plt.scatter(trajectory[m, -1, 0], trajectory[m, -1, 1],
marker='*', s=150, label=f'UAV-{m+1}终点')
plt.scatter(user_pos[0], user_pos[1], c='red', marker='P',
s=200, label='用户(船只)')
plt.xlabel('X 坐标 (m)')
plt.ylabel('Y 坐标 (m)')
plt.title('空天地海一体化网络:无人机轨迹优化示意图')
plt.legend()
plt.grid(True, alpha=0.3)
plt.axis('equal')
plt.show()这段代码模拟了一个典型的空天地海一体化网络场景:一艘在海洋上航行的船只需要完成一个50Mbit的计算密集型任务,它可以选择在本地计算一部分,也可以把任务卸载到3架无人机中的某一架,或者卸载到一颗低轨卫星。
代码分为三个阶段:
- 匹配阶段:计算到各无人机的信道速率,选择速率最优的无人机进行关联。这类似于“货比三家”,选最好的服务商。
- 分配阶段:将总任务量切分为三块——本地计算、卸载到无人机、卸载到卫星。每一块各占多少不是拍脑袋决定的,而是受限于本地算力、链路速率和时延约束。
- 轨迹优化阶段:用简化的连续凸逼近思想,让无人机向用户方向飞行,以缩短通信距离、提升信道质量。这背后有一个朴素但重要的工程直觉——让服务器动起来,去靠近用户,而不是让用户去求服务器。
运行这段代码,将会看到:
- 哪个无人机被选中
- 任务如何在本地、无人机和卫星之间动态分配
- 无人机的飞行轨迹
- 系统的总能耗、吞吐量和能效
真实的6G调度器里,这些过程会在毫秒级完成,而且决策依据会更加复杂——包括实时信道状态、业务优先级、网络负载、能源预算等。 代码中使用的连续凸逼近算法,在优化领域是一个非常成熟的方法,其核心思想是:在局部点对非线性函数做线性化近似,迭代逼近最优解。
六、为什么要这样演变?意义何在?
说到这里,我想大家应该能感受到,空天地海一体化网络不仅仅是“把卫星加进来”这样简单的事。
它的深刻意义在于:
第一,这是网络架构从“以连接为中心”到“以任务为中心”的根本转变。
5G时代,网络的核心使命是“把数据从A送到B”。而6G时代,网络的核心使命变成了“为任务提供最优的资源组合”。当你需要做AI推理时,网络不再只是传输数据,而是调度算力、算法、数据,甚至帮你在最近的边缘节点上完成推理。这个转变,从根本上改变了通信网络的本质。
第二,它让“数字孪生”从概念变成了工程必需品。
空天地海一体化网络的复杂度远远超过地面网络。卫星轨道变化、无人机飞行路径、气候和环境条件,都是极其动态的。在这种情况下,像赵晶等人在论文中提到的“五维数字孪生模型”,就成为了一种必备的技术手段:我们在虚拟世界建立网络的完全映射,在这里做预测、仿真、优化,再把好的策略应用到物理世界中。
第三,它辐射的应用场景让人兴奋。
- 海洋经济:远洋货轮、海洋牧场、海底监测网络的大规模联网;
- 航空通信:航空公司利用星地链路为飞机提供宽带互联网;
- 灾害应急:地震、洪水发生后,地面通信设施被毁,无人机和卫星快速组网构建应急通信系统;
- 国防安全:全域覆盖、自主可控的军事通信和侦察能力;
- 普惠连接:为偏远山区、荒漠、极地等“连接荒漠”提供高质量互联网。
结语
6G时代,“空天地海一体化网络”不是未来幻想,而是正在发生的工程实践。
从技术路径看,我们已经看到几点很清晰的趋势:数字孪生驱动网络自智化、光电融合提升传输能力、分布式子网实现灵活部署、AI内生化让网络学会自己决策。
当然,挑战也很大:数据标准化程度低、多源异构数据的整合难度大、卫星数字化设计深度不足、高频信道的性能保障困难……但正是这些挑战,让技术从业者的工作变得有价值。
期待有朝一日,当你在珠穆朗玛峰顶、太平洋中央或是青藏高原的无人区打开手机的时候,看到的不再是“无信号”,而是一个稳定、高速、智能的网络连接。那就是空天地海一体化网络兑现承诺的时刻。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 16
16 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)