MATLAB基于领航追随法的车辆编队控制,领航追随者与人工势场法的简单融合实现避障
本文介绍一种结合领航-追随(Leader-Follower)架构与人工势场法(Artificial Potential Field, APF)的多智能体车辆编队控制算法。该系统旨在实现多个无人车辆在跟随预设领航者运动的同时,能够对静态障碍物进行自主避障,保证编队结构稳定性与路径安全性。整个系统在MATLAB环境中实现,适用于仿真验证与算法原型开发。本文实现的系统成功将领航-追随编队控制与人工势场避
MATLAB基于领航追随法的车辆编队控制,领航追随者与人工势场法的简单融合实现避障
概述
本文介绍一种结合领航-追随(Leader-Follower)架构与人工势场法(Artificial Potential Field, APF)的多智能体车辆编队控制算法。该系统旨在实现多个无人车辆在跟随预设领航者运动的同时,能够对静态障碍物进行自主避障,保证编队结构稳定性与路径安全性。整个系统在MATLAB环境中实现,适用于仿真验证与算法原型开发。
系统架构与核心思想
本方案采用一个领航者 + 多个追随者的结构。领航者按照预设的轨迹(本文为直线路径)匀速运动,其状态(位置、朝向、速度)对所有追随者公开。每个追随者根据自身与领航者之间的期望几何关系(如相对距离和角度)调节自身的线速度与角速度,从而实现编队维持。
在此基础上,为提升系统鲁棒性,引入人工势场法用于局部避障。当检测到下一时刻位置将进入障碍物影响范围时,系统在当前位置邻域内采样若干候选点,通过人工势场函数计算其综合势能(包含朝向目标的引力与远离障碍的斥力),选择势能最低者作为临时修正位置,从而绕过障碍。
编队控制逻辑
期望编队构型
每个追随者与领航者之间定义了固定的期望相对位姿:
- 距离 $d$
- 相对角度 $\phi$(相对于领航者朝向)
例如,追随者1期望位于领航者后方左侧,距离为1米,角度为 $-5\pi/6$;追随者2则位于后方右侧,距离1.5米,角度为 $5\pi/6$。这种设计可自然形成稳定三角形或V型编队。
运动学建模与误差反馈
系统基于非完整约束轮式机器人的运动学模型:
$$
\dot{x} = v \cos\theta, \quad \dot{y} = v \sin\theta, \quad \dot{\theta} = \omega
MATLAB基于领航追随法的车辆编队控制,领航追随者与人工势场法的简单融合实现避障
$$
其中 $v$ 为线速度,$\omega$ 为角速度。
控制律基于当前与期望构型之间的位置误差($xe, ye$)和朝向误差($\thetae$)构建。通过设计合适的误差动态方程,并引入状态反馈增益(如 $c{11}, c_{12}$ 等参数),实时调整追随者的 $v$ 与 $\omega$,使误差渐近收敛。
避障机制:人工势场融合
为避免编队在狭窄或障碍密集区域发生碰撞,系统在每步控制后检查追随者预测位置是否接近已知静态障碍物(设定阈值距离,如0.2米)。
若检测到潜在碰撞,则触发避障子程序:
- 以当前实际位置为圆心,生成一圈均匀分布的测试点(如30个方向);
- 对每个测试点,调用势场函数
computP计算其综合势能; - 综合势能 = 目标引力势能 + 障碍物斥力势能;
- 引力项鼓励向原定目标(即未避障时的下一位置)靠近;
- 斥力项在进入障碍影响半径 $Q^*$ 时激活,随距离减小而急剧增大; - 选取势能最小的测试点,与当前位置加权平均,作为修正后的新位姿。
该策略在保持编队整体结构的同时,实现局部、平滑且计算高效的避障行为。
仿真与可视化
系统运行总时长150秒,时间步长0.01秒,共15000步。仿真输出包括:
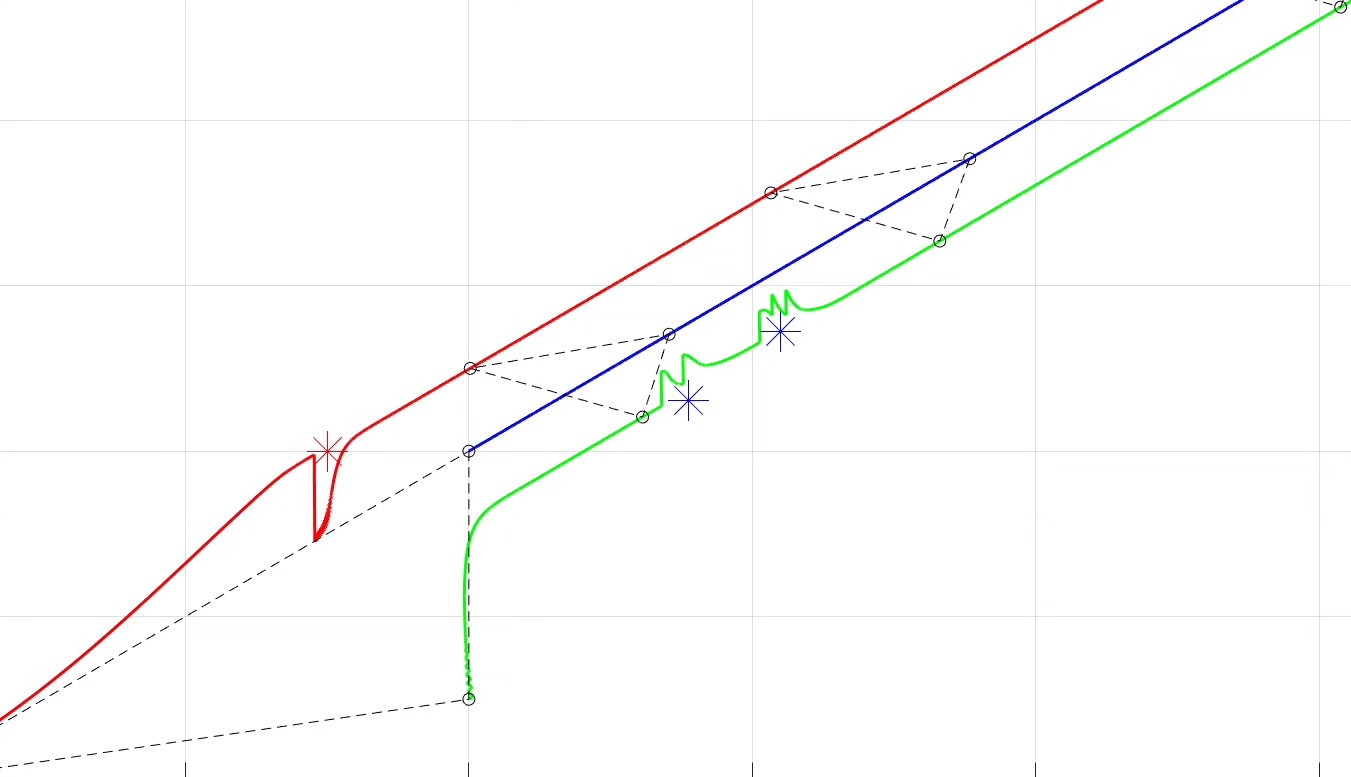
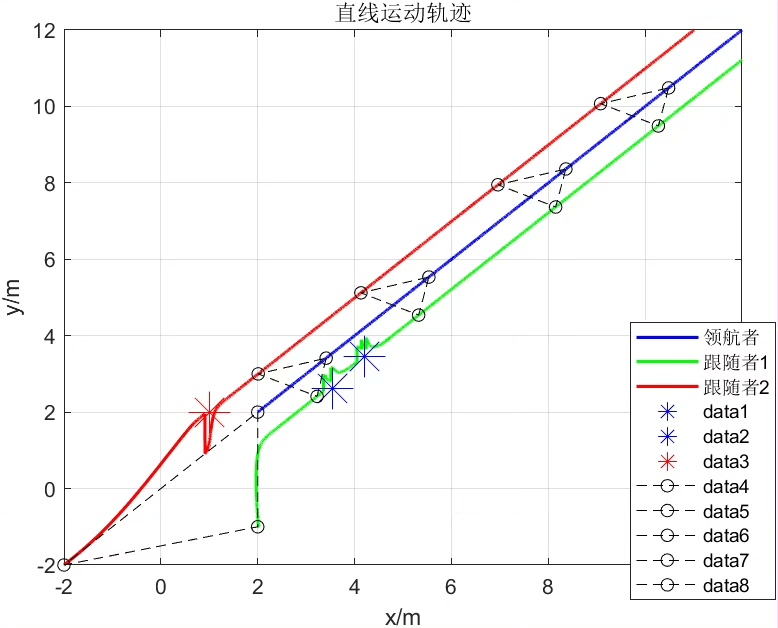
- 轨迹图:展示领航者与两个追随者的运动路径,叠加障碍物位置及多个时间点的编队构型(连线);
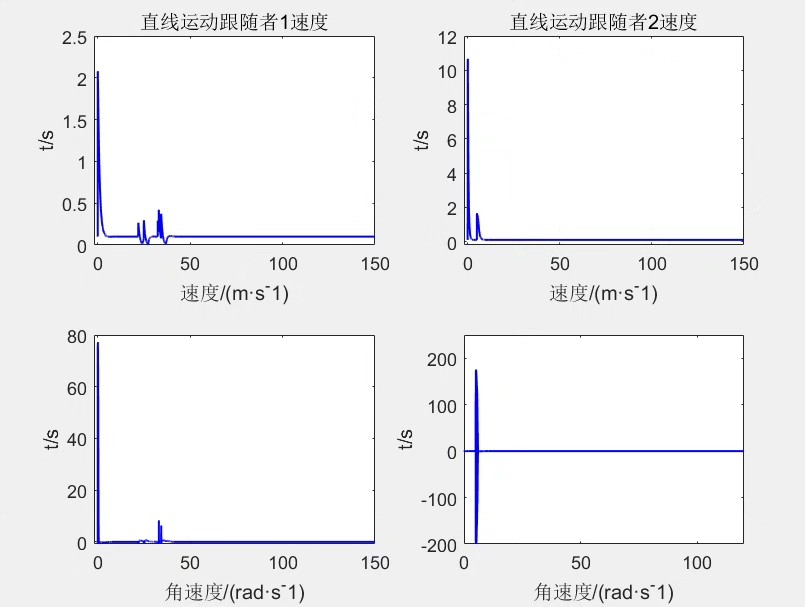
- 速度与角速度曲线:反映控制输入的动态特性;
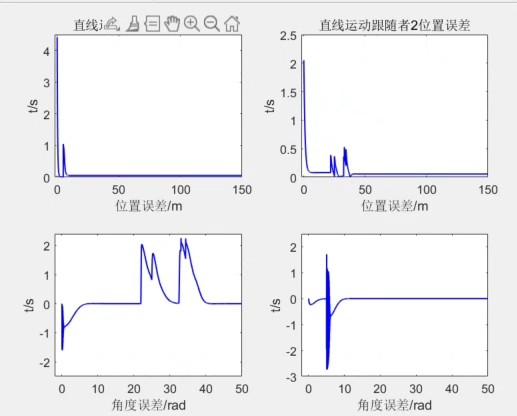
- 误差收敛图:包括位置误差与角度误差随时间变化,验证编队稳定性。
从结果可见,即便在障碍物附近,追随者也能迅速调整路径,绕行后快速回归期望构型,证明了融合策略的有效性。
总结与扩展方向
本文实现的系统成功将领航-追随编队控制与人工势场避障有机结合,兼顾了编队稳定性与环境适应性。其模块化设计便于扩展:
- 可引入动态障碍物处理逻辑;
- 可升级为分布式通信架构(如仅依赖局部邻居信息);
- 可结合更先进的势场模型(如谐波势场、导航函数)以解决局部极小值问题;
- 可迁移到ROS等机器人中间件平台,用于实车部署。
该方案为多智能体协同导航提供了一个简洁、高效且易于调试的参考实现。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 47
47 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)