DC7 - Four-Quadrant Chopper 200 HP DC Drive MATLAB_help文档DeepSeek翻译
本示例展示了DC7四象限斩波器直流驱动在速度调节期间的工作情况。C.Semaille, Louis-A. Dessaint (蒙特利尔高等技术学院)
DC7 - 四象限斩波器 200 HP 直流驱动
本示例展示了DC7四象限斩波器直流驱动在速度调节期间的工作情况。
C.Semaille, Louis-A. Dessaint (蒙特利尔高等技术学院)
描述
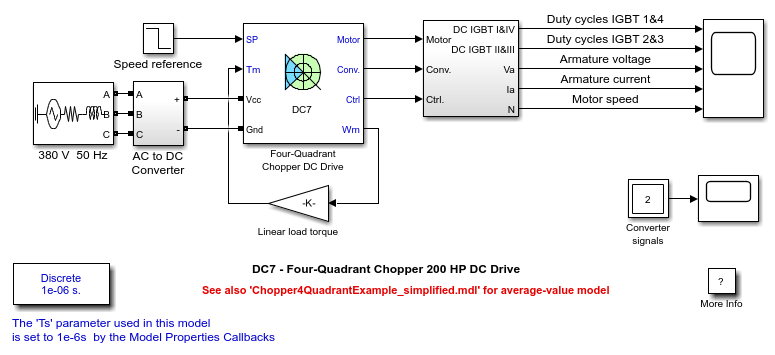
该200 HP直流电机由恒定的150 V直流励磁电压源单独励磁。电枢电压由一个由两个PI调节器控制的IGBT变换器提供。该变换器由一个515 V直流母线供电,该母线通过对380 V交流50 Hz电压源进行整流获得。为了在动态制动模式下限制直流母线电压,在二极管整流器和DC7模块之间增加了一个制动斩波器。
第一个调节器是速度调节器,其后是电流调节器。速度调节器输出电流控制器使用的电枢电流参考值(标幺值),以获得达到期望速度所需的电磁转矩。速度参考值的变化率遵循加速和减速斜坡,以避免突然的参考值变化,这种变化可能导致电枢过流并使系统失稳。电流调节器通过计算四个IGBT器件(脉宽调制)的5 kHz脉冲的适当占空比来控制电枢电流。为了获得正确的系统行为,IGBT器件1和4的瞬时脉冲值与IGBT器件2和3的瞬时脉冲值相反。这产生了获得所需电枢电流所需的平均电枢电压。为了限制电流振荡的幅度,一个平波电感与电枢电路串联。
仿真
开始仿真前,通过GUI模块('初始状态设置’按钮和’Cbus’变量)将初始母线电压设置为515 V。
开始仿真。您可以在示波器上观察电机电枢电压和电流、四个IGBT脉冲以及电机速度。电流和速度参考值也会显示。
电机与一个线性负载耦合,这意味着负载的机械转矩与速度成正比。
速度参考值在 t = 0 s 时设置为 500 rpm。观察到电机速度准确地跟随参考斜坡(+400 rpm/s)并在 t ≈ 1.3 s 时达到稳态。
电枢电流很好地跟随电流参考值,响应时间快且纹波小。注意电流纹波频率为 5 kHz。
在 t = 2 s 时,速度参考值降至 -1184 rpm。电流参考值减小以降低电磁转矩,并在负载转矩的帮助下使电机减速。
在 t = 2.2 s 时,电流反向以产生制动电磁转矩(动态制动模式)。这导致直流母线电压升高。
在 t = 3.25 s 时,电机达到 0 rpm,负载转矩反向变为负值。负电流现在产生加速电磁转矩,使电机能够跟随负速度斜坡(-400 rpm/s)。在 t = 6.3 s 时,速度达到 -1184 rpm 并稳定在其参考值附近。
注释
-
电力系统已使用 1 us 的时间步长进行离散化。速度和电流控制器分别使用 100 us 和 20 us 的采样时间,以模拟微控制器控制设备。
-
为了减少存储在示波器内存中的数据点数,使用了 25 的抽取因子。因此,某些瞬变过程可能不会显示在示波器上。要查看详细的仿真结果,请将抽取因子减小到 1。
-
通过在图形用户界面的"模型详细级别"菜单中选择"平均值",可以使用采用平均值变换器的简化版本模型。然后,时间步长可以增加到控制系统的最小采样时间值。在本示例中,可以通过在工作区键入
Ts = 20e-6来完成此操作。另请参见 dc7_example_simplified 模型。
版权标注与来源说明
本文译文对应的原文内容,均来源于 MathWorks 官方网站(https://www.mathworks.com/)及官方帮助中心,原文版权均独家归属MathWorks 公司所有。
译文系基于原文进行的非官方翻译,仅为方便个人学习、理解MathWorks相关产品(含MATLAB等)的功能、操作及技术细节而制作,不代表MathWorks公司官方立场,也不构成官方翻译版本。
建议使用者优先查阅官方原文。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 4
4 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)