A\* 与人工势场融合路径规划算法实现详解
本系统成功实现了 A\与人工势场法的优势互补:A\提供可靠的全局骨架,人工势场法则赋予路径平滑性与动态适应能力。代码结构严谨,注释详尽,不仅适用于教学演示,也为实际机器人导航系统提供了可复用的技术框架。未来可进一步集成运动学约束、多智能体协同或学习型势场等高级功能,提升系统在复杂现实场景中的鲁棒性。A星算法 A*算法自己研究编写的Matlab路径规划算法Astar算法走迷宫可自行设置起始点,目标点
A星算法 A*算法 自己研究编写的Matlab路径规划算法 Astar算法走迷宫 可自行设置起始点,目标点,自由更换地图。 ——————————————————— 可以和人工势场法融合 动态障碍物(默认发未融合版本只是A*)
本文深入解析一套融合 A\ 算法与人工势场法(APF)的混合路径规划系统。该系统结合了 A\ 算法的全局最优性与人工势场法的局部避障灵活性,适用于静态与动态障碍共存的复杂栅格地图环境。代码整体结构清晰,模块化程度高,具备良好的可读性与扩展性。
一、系统总体架构
该路径规划系统分为两大核心阶段:
- 全局路径生成阶段:基于 A\* 算法在静态栅格地图中搜索从起点到终点的最优路径;
- 局部轨迹优化与动态避障阶段:将 A\* 路径作为引导轨迹,引入人工势场法进行平滑处理,并实时响应动态障碍物的干扰。
整个流程在 MATLAB 环境中实现,包含地图构建、障碍物预处理、路径搜索、轨迹平滑、动态避障等多个功能模块。
二、地图建模与障碍物预处理
系统首先构建一个二维栅格地图(例如 20×20 或 30×30),用户可自定义起点、终点及静态障碍物坐标。为提升 A\* 算法在对角线移动时的可行性,系统引入了一套障碍物优化机制:
- 对角线不可达问题识别:检测两个相邻障碍物形成“对角封锁”结构,导致机器人无法斜穿;
- 自动补障策略:在关键位置动态插入虚拟障碍物,强制 A\* 规避此类不可通行区域;
- 迭代优化:通过多次扫描与补充,确保地图拓扑结构满足 8 邻域连通性要求。
该机制显著提升了路径的物理可行性,避免了传统 A\* 在栅格地图中因忽略机器人尺寸或运动约束而生成“理论可行但实际不可达”路径的问题。
三、A\* 全局路径搜索
系统实现了标准 A\* 算法的完整流程,包含开放列表(Open List)与关闭列表(Closed List)管理、启发函数设计、代价更新等关键环节:
- 启发函数:采用曼哈顿距离(Manhattan Distance)作为到目标点的估计代价,适用于栅格地图且保证可采纳性(Admissible);
- 移动模型:支持 8 方向移动(含对角线),对角线移动需额外检查相邻直角格是否为障碍,以确保路径物理可行;
- 代价计算:实际路径代价(G 值)采用欧氏距离累加,总代价 F = G + H;
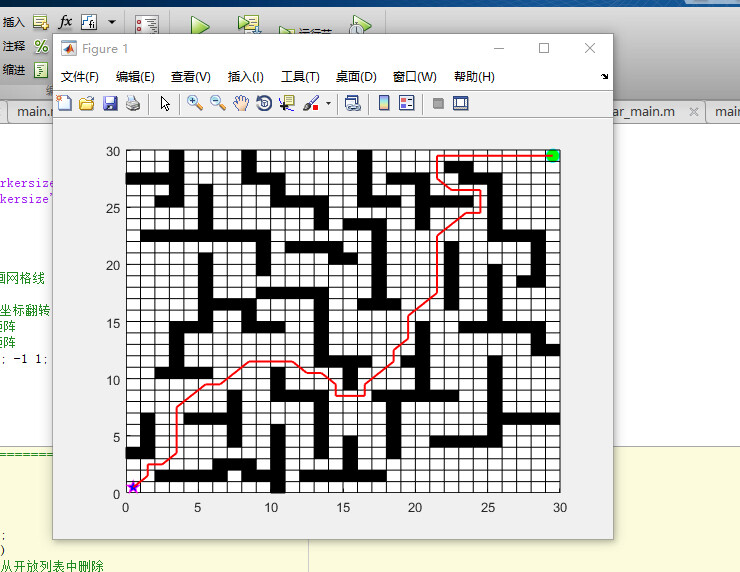
- 路径回溯:通过父节点指针矩阵重建从终点到起点的完整路径,并可视化绘制。
该阶段输出一条离散的、由栅格中心点组成的折线路径,作为后续人工势场法的引导轨迹。
四、贝塞尔曲线轨迹平滑
为提升路径的运动学可行性,系统引入分段贝塞尔曲线对 A\* 路径进行平滑处理:
- 将原始路径划分为若干段;
- 在关键拐点附近手动插入控制点,增强曲线对原路径的贴合度;
- 调用自定义贝塞尔曲线生成函数,输出高密度连续轨迹点;
- 拼接各段曲线,形成一条全局连续、可微的参考轨迹。
平滑后的轨迹不仅视觉上更自然,也为后续人工势场法提供了高质量的引力源。
五、人工势场法局部优化与动态避障
在获得平滑参考轨迹后,系统启动人工势场法进行精细化导航:
- 引力源:包含目标点引力与参考轨迹引力。轨迹引力确保车辆紧贴规划路径,避免大幅偏离;
- 斥力源:来自静态障碍物与动态障碍物。代码中模拟了两个可移动圆形障碍物,其位置在每一步实时更新;
- 改进斥力模型:采用经典 APF 的改进形式,引入目标距离调节因子,确保车辆抵达终点时斥力归零,避免振荡;
- 合力驱动:计算引力与斥力的矢量和,沿合力方向以固定步长推进,实现连续轨迹跟踪;
- 实时响应:动态障碍物的位置在循环中不断更新,系统能即时调整运动方向,实现在线避障。
该阶段将离散路径转化为连续运动轨迹,并具备应对环境变化的能力。
六、性能与扩展性
- 运行效率:通过
tic/toc计时,系统可在数百毫秒内完成 20×20 地图的完整规划; - 路径质量:最终轨迹兼顾全局最优性与局部安全性,总长度可通过欧氏距离累加精确计算;
- 可配置性强:引力/斥力增益系数、影响半径、步长等参数均可调节,适应不同场景需求;
- 扩展潜力:动态障碍物模块设计灵活,易于接入真实传感器数据或仿真环境。
七、总结
本系统成功实现了 A\ 与人工势场法的优势互补:A\ 提供可靠的全局骨架,人工势场法则赋予路径平滑性与动态适应能力。代码结构严谨,注释详尽,不仅适用于教学演示,也为实际机器人导航系统提供了可复用的技术框架。未来可进一步集成运动学约束、多智能体协同或学习型势场等高级功能,提升系统在复杂现实场景中的鲁棒性。
A星算法 A*算法 自己研究编写的Matlab路径规划算法 Astar算法走迷宫 可自行设置起始点,目标点,自由更换地图。 ——————————————————— 可以和人工势场法融合 动态障碍物(默认发未融合版本只是A*)

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 20
20 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)