西门子PLC S7 - 1200项目实战:多设备通讯与PID温度控制
这个FB块就像一个智能的温度调节小助手。在多路控制时,我们只需要填上对应的温度传感器地址、控制输出地址等参数,无需再一个个去编复杂的梯形图。// 调用PID FB块示例SP_INT := 25.0, // 设定温度值PV_IN := REAL_TO_INT(AI_TEMPERATURE), // 实际温度值,来自模拟量输入GAIN := 2.0, // 比例系数TI := T#20S, // 积分
西门子PLC S7-1200和变频器Modbus RTU 通 讯,有自录4平,盗卖请绕行,4平已保护,托利多电子称modbus RTU通讯 西门子1200 PID 温度控制 PID温度控制已写好FB块,多路控制时只需要填上地址,不必浪费时间一个个编梯形图 原创真实项目,有项目详细说明,带西门子触摸,变频器参数/Modbus通讯说明/CAD电气图纸/硬件组态过程有内部教案等项目文件,容易上手,注释详细
在工控领域,西门子PLC S7 - 1200凭借其强大的功能和稳定性备受青睐。今天就来聊聊我在实际项目中,利用S7 - 1200实现与变频器Modbus RTU通讯、托利多电子称Modbus RTU通讯以及PID温度控制的那些事儿。
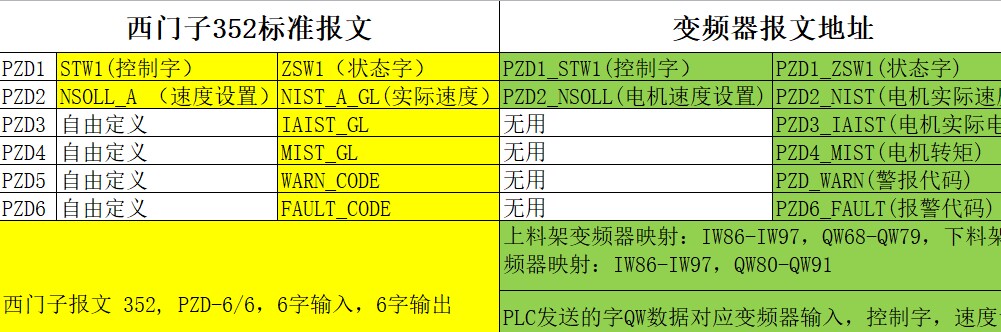
一、西门子PLC S7 - 1200与变频器Modbus RTU通讯
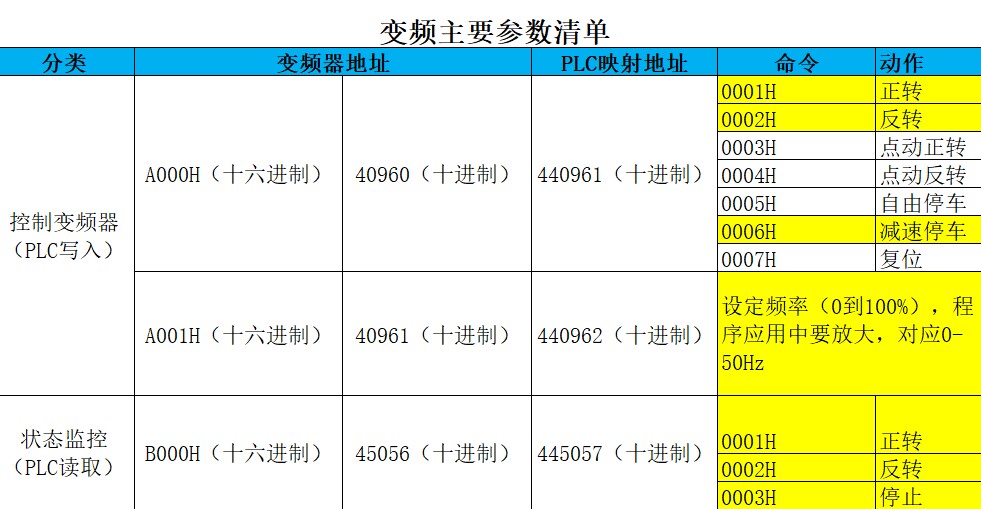
变频器在工业自动化系统中起着调速等关键作用。通过Modbus RTU协议与S7 - 1200通讯,能实现更精准的控制。
硬件连接
首先要确保硬件连接正确,一般变频器的485接口与S7 - 1200的CM 1241 RS485模块相连,注意A接A,B接B,并且要做好接地,避免干扰。
软件编程
在TIA Portal软件中,编程实现通讯。以下是一段简单的通讯代码示例(以博途TIA Portal的LAD语言为例):
// 初始化MB_COMM_LOAD指令
MB_COMM_LOAD_DB(
COMM_PORT := 1,
BAUD := 9600,
PARITY := 0,
STOPBITS := 1,
RTS_ON_DLY := 10,
RTS_OFF_DLY := 10,
DONE => DONE_MB_COMM_LOAD,
ERROR => ERROR_MB_COMM_LOAD,
STATUS => STATUS_MB_COMM_LOAD
);
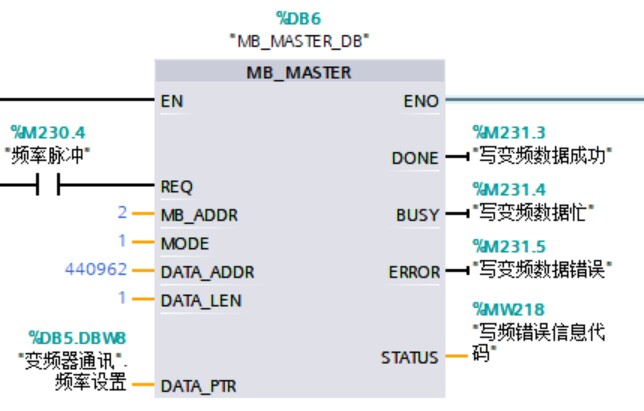
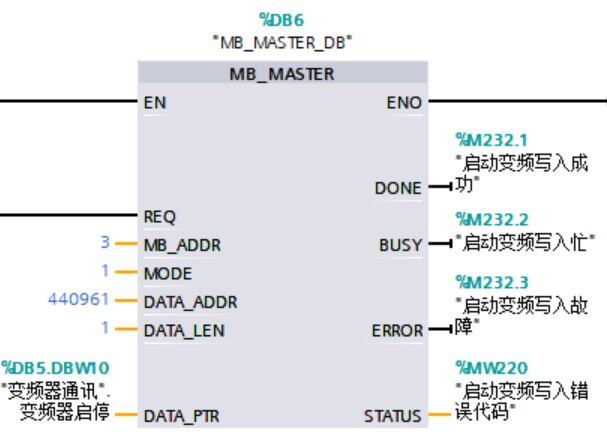
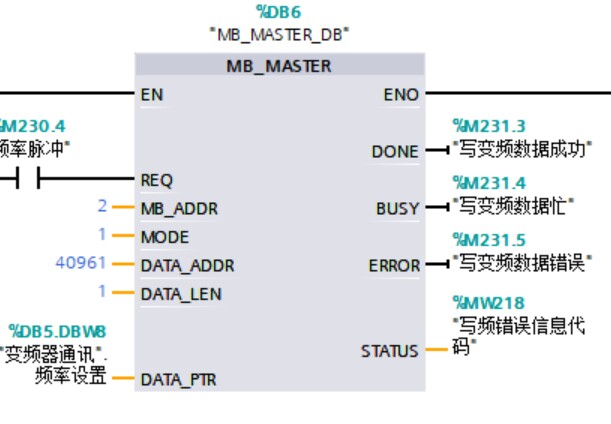
// MB_MASTER指令用于读写变频器数据
MB_MASTER_DB(
REQ := REQ_READ_WRITE,
MB_ADDR := 1, // 变频器的Modbus地址
MODE := 2, // 读保持寄存器
DATA_ADDR := 40001, // 寄存器起始地址
DATA_LEN := 2, // 读取数据长度
DATA_PTR := P#DB1.DBX0.0 BYTE 4, // 数据存储区
DONE => DONE_MB_MASTER,
ERROR => ERROR_MB_MASTER,
STATUS => STATUS_MB_MASTER
);在这段代码中,MBCOMMLOADDB指令用于初始化通讯端口,设置波特率、奇偶校验等参数。MBMASTERDB指令则负责实际的数据读写操作,这里以读取变频器保持寄存器为例,REQ触发读写请求,MBADDR指定变频器的Modbus地址,MODE确定操作模式,DATAADDR和DATALEN分别是寄存器起始地址和读取长度,DATA_PTR指向数据存储的区域。
二、托利多电子称Modbus RTU通讯
托利多电子称在很多工业场合用于精准称重。与S7 - 1200进行Modbus RTU通讯,能实时获取重量数据。
硬件连接
同样通过485接口将电子称与S7 - 1200的CM 1241 RS485模块连接好。
软件编程
代码结构与变频器通讯类似,但具体的Modbus地址和寄存器定义不同。
// 初始化电子称通讯端口
MB_COMM_LOAD_DB(
COMM_PORT := 2,
BAUD := 9600,
PARITY := 0,
STOPBITS := 1,
RTS_ON_DLY := 10,
RTS_OFF_DLY := 10,
DONE => DONE_MB_COMM_LOAD_SCALE,
ERROR => ERROR_MB_COMM_LOAD_SCALE,
STATUS => STATUS_MB_COMM_LOAD_SCALE
);
// 读取电子称数据
MB_MASTER_DB(
REQ := REQ_READ_SCALE,
MB_ADDR := 2, // 电子称的Modbus地址
MODE := 3, // 读输入寄存器
DATA_ADDR := 30001,
DATA_LEN := 2,
DATA_PTR := P#DB2.DBX0.0 BYTE 4,
DONE => DONE_MB_MASTER_SCALE,
ERROR => ERROR_MB_MASTER_SCALE,
STATUS => STATUS_MB_MASTER_SCALE
);这里对电子称通讯端口进行初始化,MBMASTERDB指令用于读取电子称的输入寄存器数据,从而获取重量等信息。
三、西门子1200 PID温度控制
温度控制在许多工业过程中至关重要。我已经编写好了PID温度控制的FB块,大大提高了多路控制时的效率。
FB块介绍
这个FB块就像一个智能的温度调节小助手。在多路控制时,我们只需要填上对应的温度传感器地址、控制输出地址等参数,无需再一个个去编复杂的梯形图。
// 调用PID FB块示例
PID_CONTROL(
COM_RST := FALSE,
MAN_ON := FALSE,
PVPER_ON := TRUE,
P_SEL := TRUE,
I_SEL := TRUE,
D_SEL := FALSE,
CYCLE := T#1S,
SP_INT := 25.0, // 设定温度值
PV_IN := REAL_TO_INT(AI_TEMPERATURE), // 实际温度值,来自模拟量输入
PV_PER := WORD_TO_INT(PIW_TEMPERATURE),
MAN := 0.0,
GAIN := 2.0, // 比例系数
TI := T#20S, // 积分时间
TD := T#0S, // 微分时间
MV_OUT := REAL_TO_INT(AO_CONTROL), // 控制输出,到模拟量输出
MV_PER := WORD_TO_INT(PQW_CONTROL),
QLMN_HLM := TRUE,
QLMN_LLM := TRUE,
LMN_HLM := 27648,
LMN_LLM := 0,
LMN_P := LMN_P_VALUE,
LMN_I := LMN_I_VALUE,
LMN_D := LMN_D_VALUE,
PV_FAC := 1.0,
PV_OFF := 0.0,
LMN_FAC := 1.0,
LMN_OFF := 0.0,
I_ITL_ON := FALSE,
I_ITLVAL := 0.0,
DBDATA := PID_DATA
);在这个调用中,COMRST用于复位PID,MANON手动模式开关,PSEL、ISEL、DSEL分别选择比例、积分、微分环节,CYCLE是控制周期,SPINT设定温度,PVIN或PVPER获取实际温度,GAIN、TI、TD分别是比例系数、积分时间和微分时间,MVOUT或MVPER输出控制量。
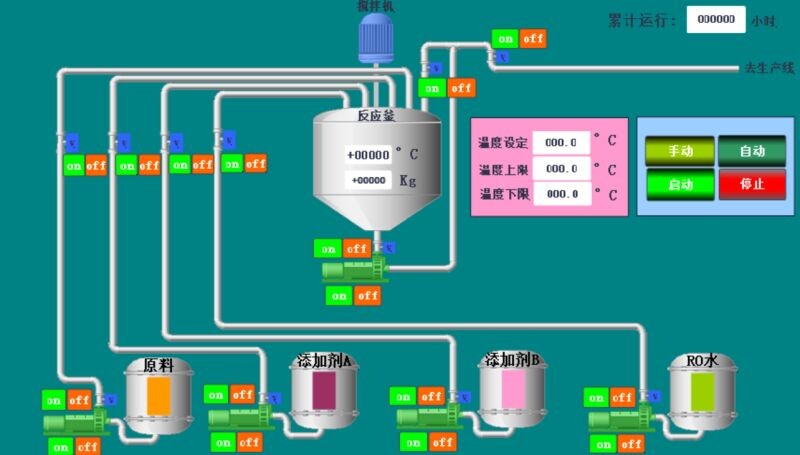
四、项目文件优势
这个项目有详细的说明文档,从西门子触摸屏的设置,到变频器参数以及Modbus通讯的说明,还有CAD电气图纸以及硬件组态过程的内部教案等。文件中的注释非常详细,对于新手来说极易上手,能够快速理解整个项目的运作流程和关键技术点。
总之,通过这些功能的整合,利用西门子PLC S7 - 1200实现了多设备的高效通讯与精准控制,希望我的这些经验能给大家在相关项目中带来一些启发。同时,本项目为原创真实项目,已做保护,请勿盗卖。


有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 15
15 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)