GPT-OSS大模型深度解析
SwigLU 的输出可能会因为输入的波动出现 “特别大的正数” 或 “特别小的负数”,这些极端数值会让模型后续计算 “跑偏”(比如梯度爆炸、输出不稳定),clamp函数在这里是 “范围限制器”,作用是把 SwigLU 的输出控制在指定区间内,避免数值太夸张导致模型不稳定。大模型的每一层的输入输出都是一个线性求和的过程,下一层的输出只是承接了上一层输入函数的线性变换,如果没有激活函数,线性层的计算只
文章目录
模型架构
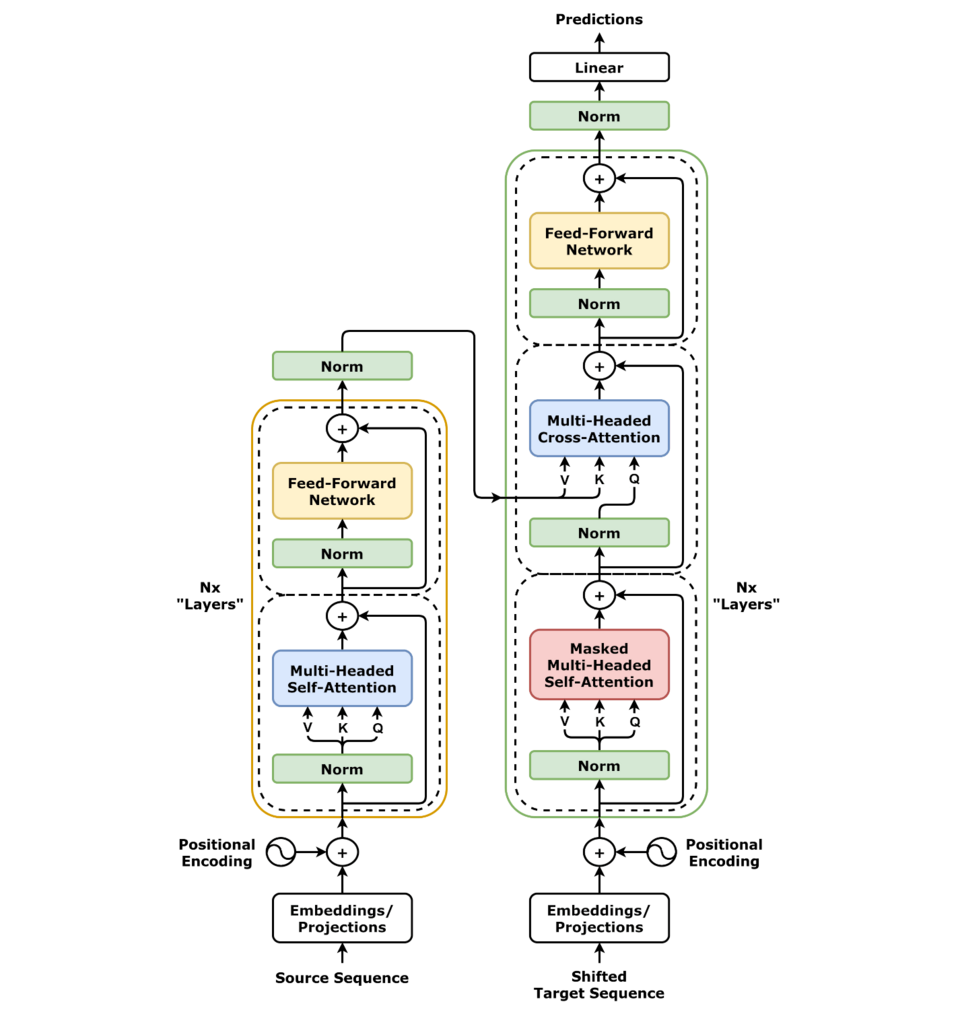
Transformer
GPT-OSS
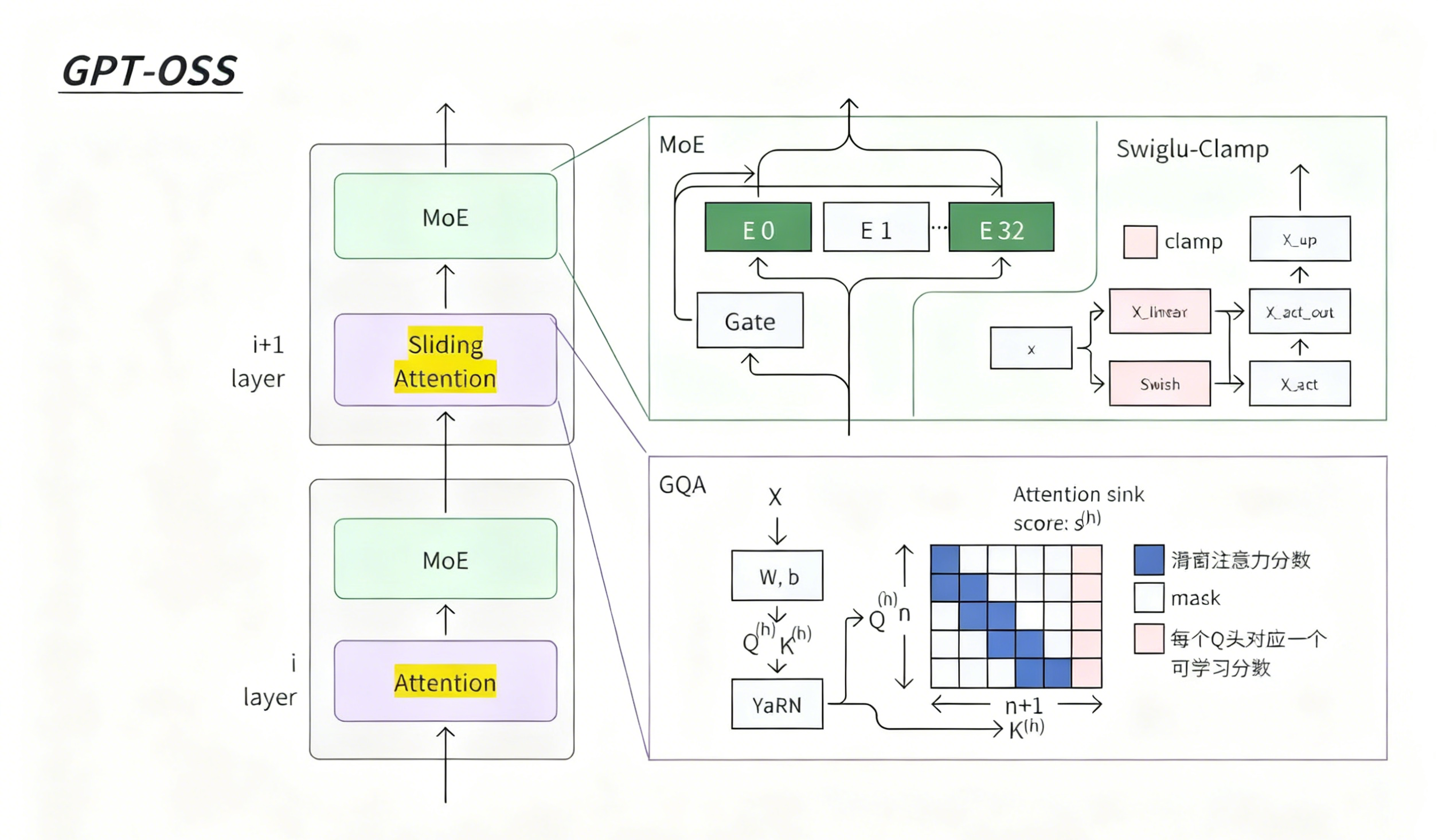
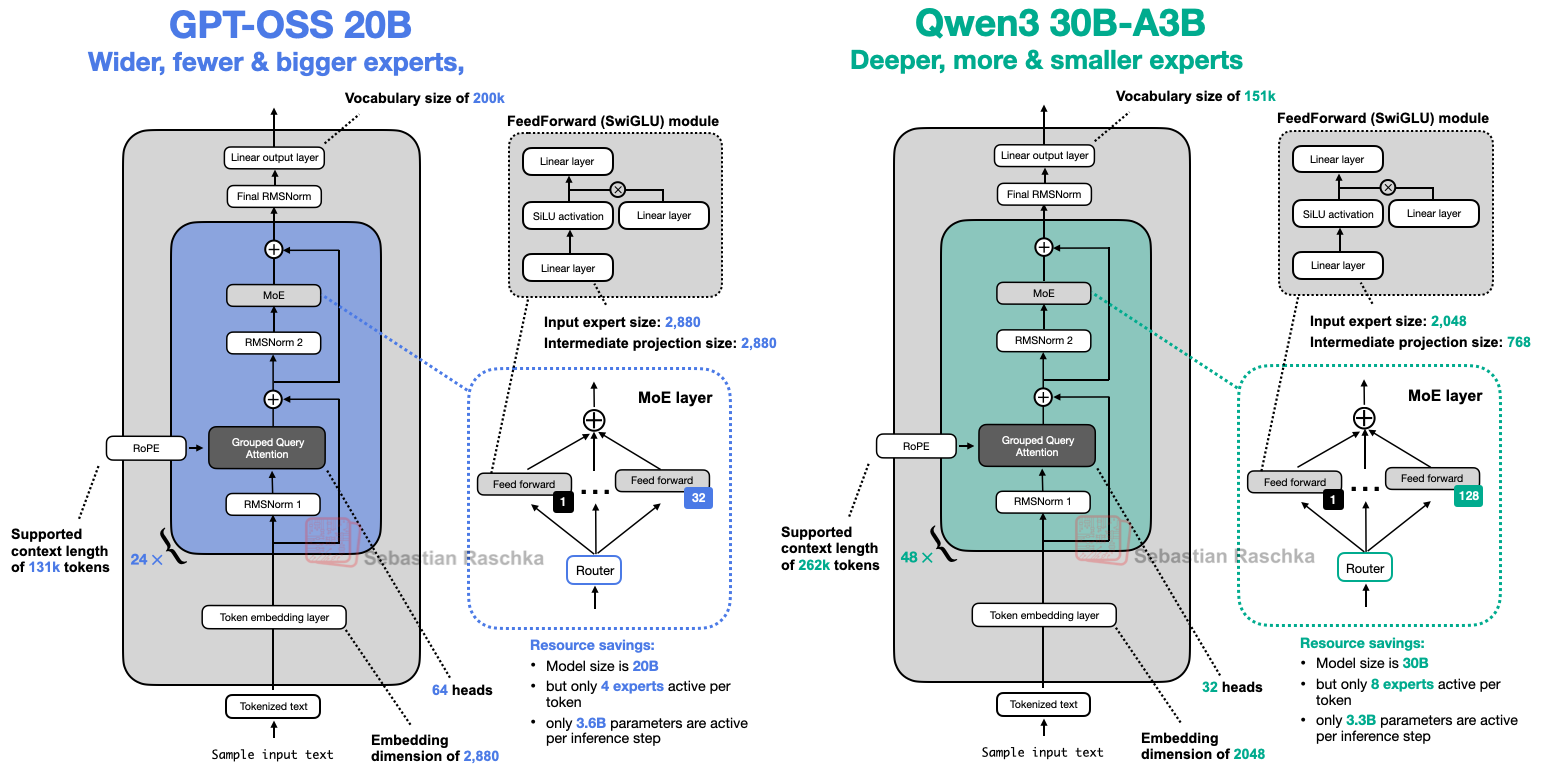
GPT-OSS是分层堆叠的设计,每一层(比如 i 层、i+1 层)都包含两个核心模块:
底层是Attention(注意力层),到了上层升级成Sliding Attention(滑动注意力)—— 这是为了处理超长文本时,减少计算量、提升效率。注意力层之上,都接了MoE(混合专家层)—— 也就是 “选专家” 模块,保证大模型能力的同时控制资源消耗。
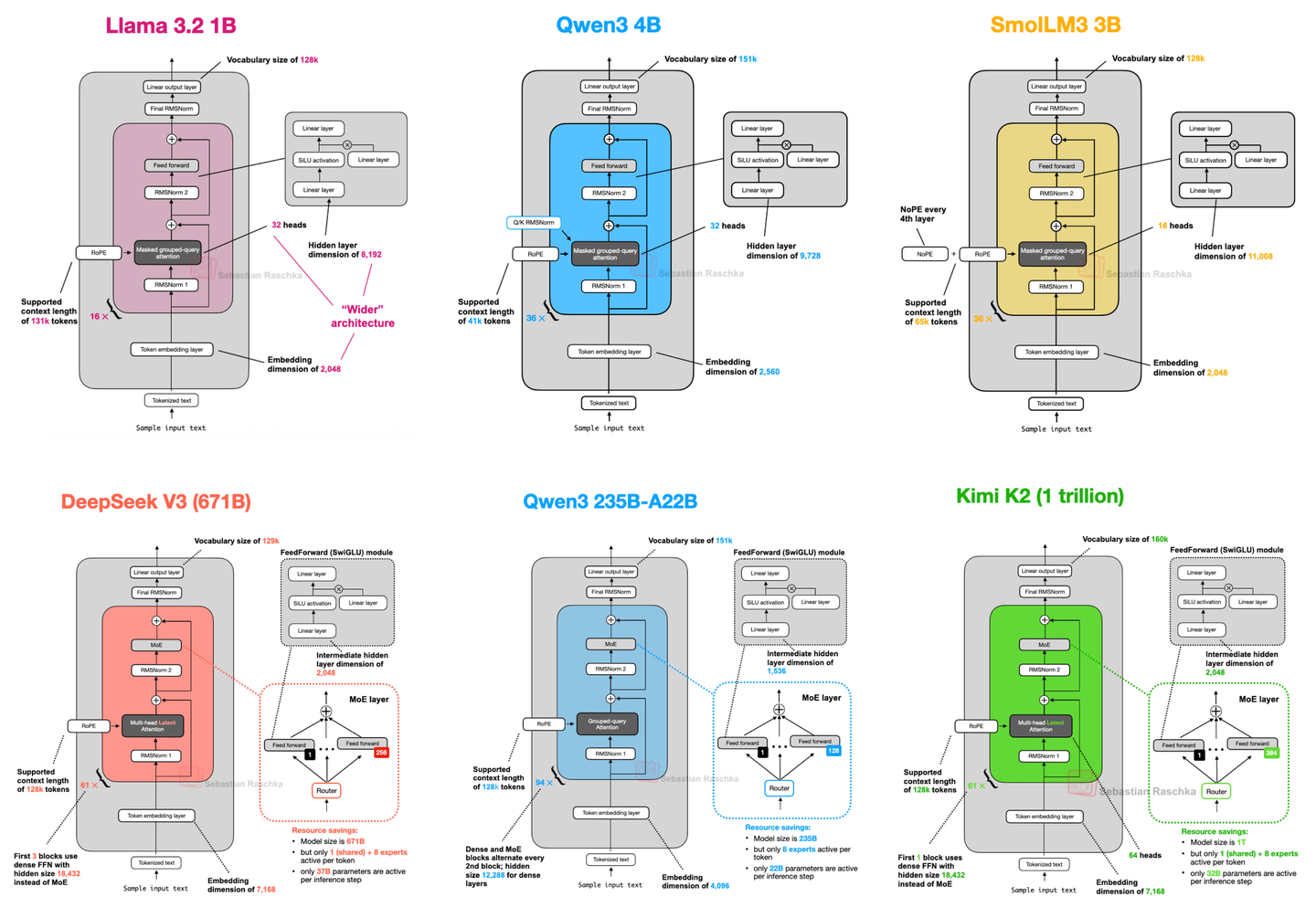
模型对比
GPT-OSS源码解析
GPT-OSS源码目录结构
.
├── awesome-gpt-oss.md
├── _build
├── CMakeLists.txt
├── compatibility-test
├── docs
├── examples
├── gpt_oss
│ ├── chat.py
│ ├── evals
│ ├── generate.py
│ ├── __init__.py
│ ├── metal # Metal后端(Apple CSilicon)
│ │ ├── benchmark
│ │ ├── CMakeLists.txt
│ │ ├── examples
│ │ ├── include
│ │ ├── __init__.py
│ │ ├── python
│ │ ├── scripts
│ │ ├── source
│ │ └── test
│ ├── responses_api # API服务层
│ │ ├── api_server.py
│ │ ├── events.py
│ │ ├── inference # 多后端推理接口
│ │ │ ├── __init__.py
│ │ │ ├── metal.py
│ │ │ ├── ollama.py
│ │ │ ├── stub.py
│ │ │ ├── transformers.py
│ │ │ ├── triton.py
│ │ │ └── vllm.py
│ │ ├── __init__.py
│ │ ├── serve.py
│ │ ├── types.py
│ │ └── utils.py
│ ├── tokenizer.py # 统一分词器接口
│ ├── tools
│ ├── torch # PyTorch后端(参考/分布式)
│ │ ├── __init__.py
│ │ ├── model.py # 模型架构定义
│ │ ├── utils.py
│ │ └── weights.py # 权重加载和量化处理
│ ├── triton # Triton + CUDA后端(高性能)
│ │ ├── attention.py # 注意力机制优化实现
│ │ ├── __init__.py
│ │ ├── model.py # Triton 高性能推理实现,优化模型
│ │ └── moe.py # Mixture of Experts (MoE) 实现
│ └── vllm # vllm后端(张量并行)
│ └── token_generator.py
├── gpt-oss-mcp-server
├── LICENSE
├── MANIFEST.in
├── pyproject.toml
├── README.md
├── tests
├── tests-data
└── USAGE_POLICY
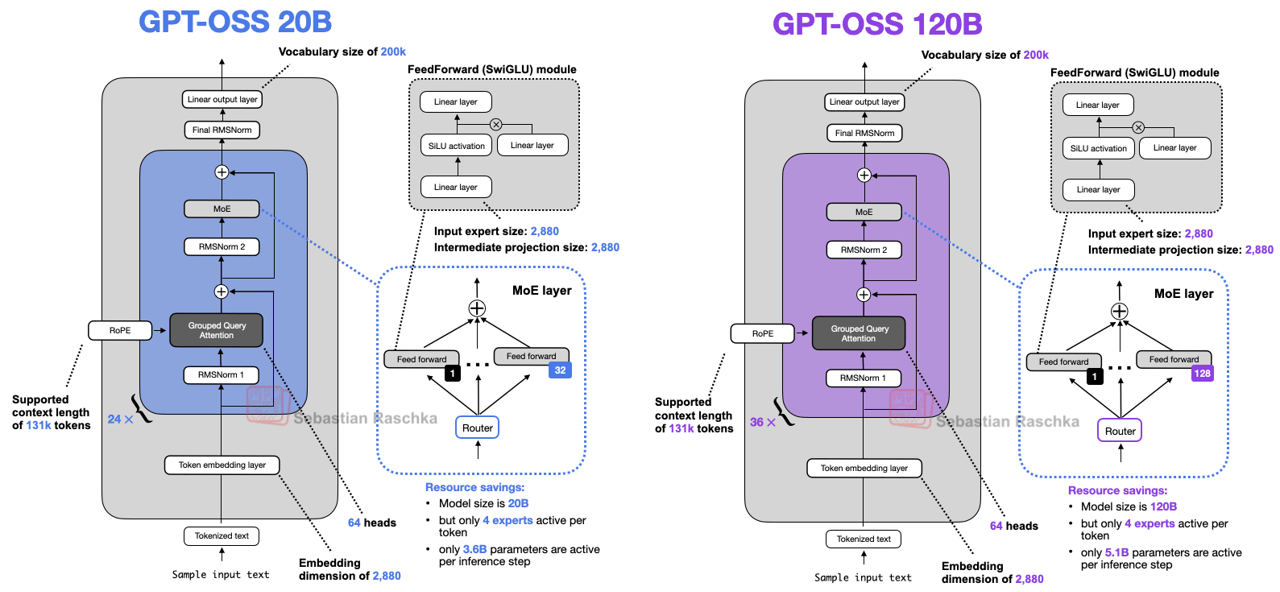
模型参数设置
@dataclass
class ModelConfig:
num_hidden_layers: int = 36 # Transformer层数
num_experts: int = 128 # MoE专家数量
experts_per_token: int = 4 # 每个token激活的专家数
vocab_size: int = 201088 # 词汇表大小
hidden_size: int = 2880 # 隐藏层维度
intermediate_size: int = 2880
swiglu_limit: float = 7.0
head_dim: int = 64 # 注意力头维度
num_attention_heads: int = 64 # 注意力头数量
num_key_value_heads: int = 8 # KV头数量(GQA)
sliding_window: int = 128 # 滑动窗口大小
initial_context_length: int = 4096
rope_theta: float = 150000.0 # RoPE基础频率
rope_scaling_factor: float = 32.0
rope_ntk_alpha: float = 1.0
rope_ntk_beta: float = 32.0
混合注意力机制
GPT-OSS采用了交替层设计策略,将滑动窗口注意力(Sliding Window Attention)和全注意力(Full Attention)有机结合。
在现代大语言模型(Large Language Model, LLM)的发展中,注意力机制(Attention Mechanism)一直是核心组件。然而,传统的全注意力机制(Full Attention)在处理长序列时面临着计算复杂度平方级增长的问题。GPT-OSS通过创新的混合注意力模式设计,在保持模型性能的同时显著降低了计算开销。
滑动窗口注意力机制
“滑动窗口注意力机制”—— 它是一种局部注意力机制,核心特点是 “每个位置只看自己周围固定范围的内容”。
在因果注意力也就是掩码注意力机制中,看到哪个词就会关注到前面所有的词。好处是能抓全信息,但如果文本很长,每个词都看所有前文,计算量会很大,就像 “看长篇小说时要回忆前几百章细节” 一样,又费时间又费精力。
而滑动窗口注意力就不一样,它只关注 “固定窗口内” 的前文 —— 比如这里窗口设得比较小,只关注前两个词,更早的词就给屏蔽掉了。
这其实特别像咱们看长篇小说的实际习惯:看到第 100 章时,不会硬记前 99 章的所有内容,只会重点回忆最近 5 章的情节 —— 既能快速跟上当前剧情(对应 “局部理解”),又不用耗费太多精力(对应 “节省计算力”)。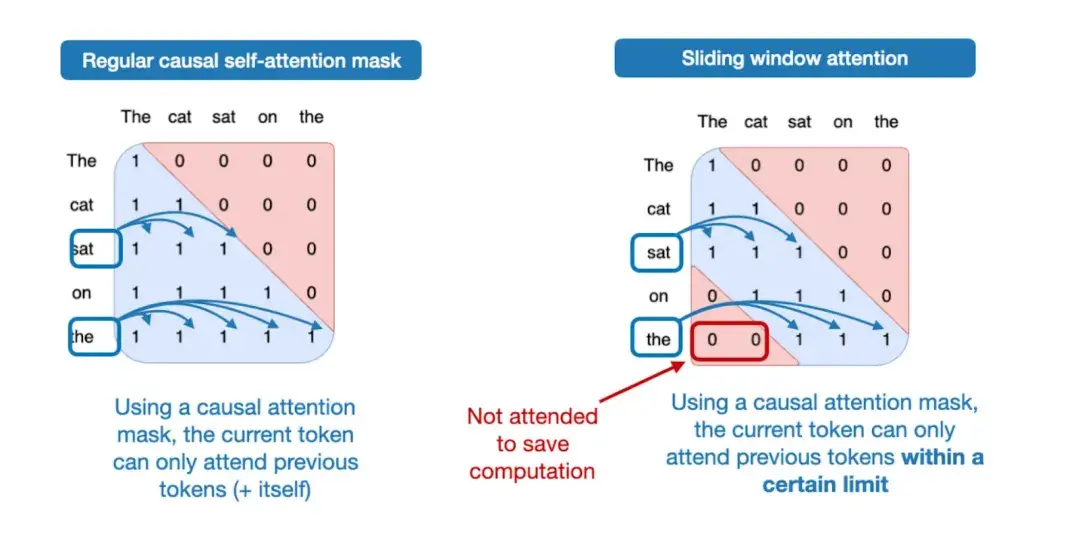
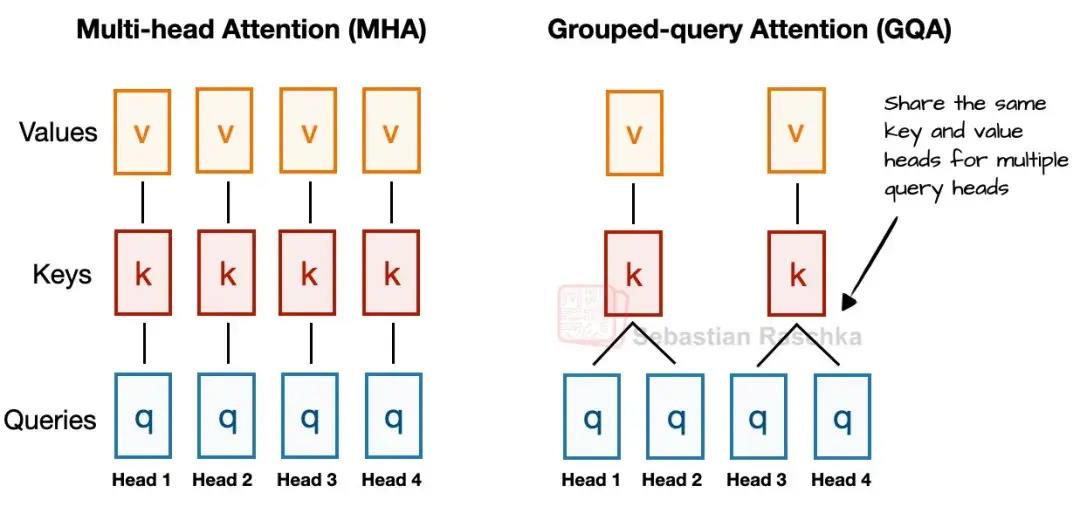
分组查询注意力
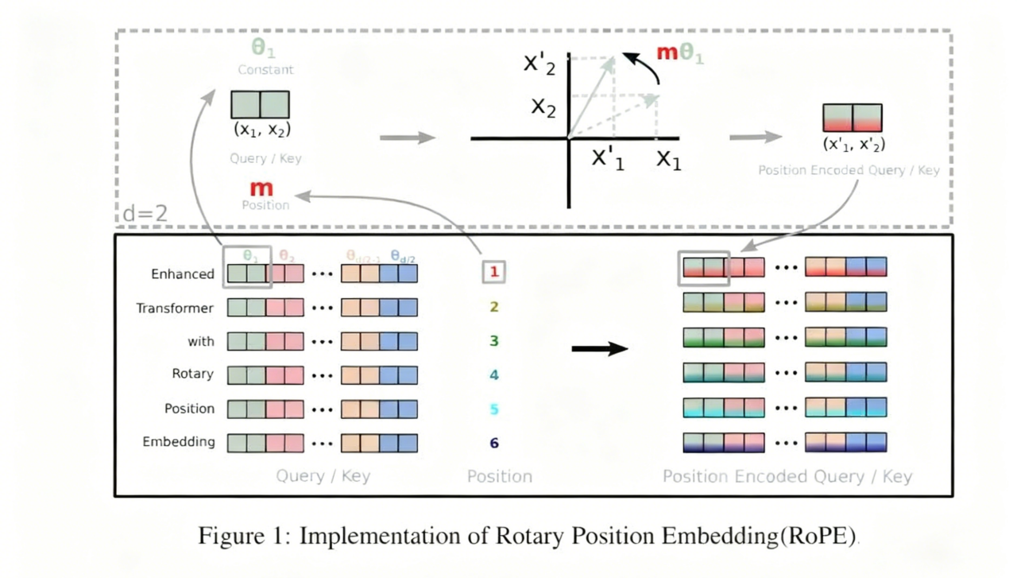
RoPE(旋转位置编码)则是通过绝对位置编码的方式实现相对位置编码。(结合了相对位置编码和绝对位置编码)
YARN(Yet Another RoPE extensioN)扩展是为了支持更长的序列。
RoPE位置编码与YARN扩展
pytorch后端
class AttentionBlock(torch.nn.Module): # 注意力机制实现
def __init__(
self,
config: ModelConfig,
layer_idx: int = 0,
device: torch.device | None = None,
):
super().__init__()
self.head_dim = config.head_dim
self.num_attention_heads = config.num_attention_heads
self.num_key_value_heads = config.num_key_value_heads
# Only apply sliding window to every other layer
self.sliding_window = config.sliding_window if layer_idx % 2 == 0 else 0
self.sinks = torch.nn.Parameter(
torch.empty(config.num_attention_heads, device=device, dtype=torch.bfloat16)
)
self.norm = RMSNorm(config.hidden_size, device=device)
qkv_dim = config.head_dim * (
config.num_attention_heads + 2 * config.num_key_value_heads
)
self.qkv = torch.nn.Linear(
config.hidden_size, qkv_dim, device=device, dtype=torch.bfloat16
)
self.out = torch.nn.Linear(
config.head_dim * config.num_attention_heads,
config.hidden_size,
device=device,
dtype=torch.bfloat16,
)
self.sm_scale = 1 / math.sqrt(config.head_dim)
self.rope = RotaryEmbedding(
config.head_dim,
config.rope_theta,
torch.float32,
initial_context_length=config.initial_context_length,
scaling_factor=config.rope_scaling_factor,
ntk_alpha=config.rope_ntk_alpha,
ntk_beta=config.rope_ntk_beta,
device=device,
)
def forward(self, x: torch.Tensor) -> torch.Tensor: # 核心计算流程
t = self.norm(x) # RMSNorm归一化
qkv = self.qkv(t) # 一次性计算Q,K,V
q = qkv[:, : self.num_attention_heads * self.head_dim].contiguous()
k = qkv[
:,
self.num_attention_heads
* self.head_dim : (self.num_attention_heads + self.num_key_value_heads)
* self.head_dim,
].contiguous()
v = qkv[
:,
(self.num_attention_heads + self.num_key_value_heads)
* self.head_dim : (self.num_attention_heads + 2 * self.num_key_value_heads)
* self.head_dim,
].contiguous()
q = q.view(
-1,
self.num_key_value_heads,
self.num_attention_heads // self.num_key_value_heads,
self.head_dim,
)
k = k.view(-1, self.num_key_value_heads, self.head_dim)
v = v.view(-1, self.num_key_value_heads, self.head_dim)
q, k = self.rope(q, k)
t = sdpa(q, k, v, self.sinks, self.sm_scale, self.sliding_window) # 缩放点积注意力
t = self.out(t) # 输出投影
t = x + t # 残差连接
return t
triton后端
class AttentionBlock(torch.nn.Module):
def __init__(
self,
config: ModelConfig,
layer_idx: int = 0,
device: torch.device | None = None,
):
super().__init__()
self.head_dim = config.head_dim
self.num_attention_heads = config.num_attention_heads
self.num_key_value_heads = config.num_key_value_heads
# Only apply sliding window to every other layer
self.sliding_window = config.sliding_window if layer_idx % 2 == 0 else 0
self.layer_idx = layer_idx
self.sinks = torch.nn.Parameter(
torch.empty(config.num_attention_heads, device=device, dtype=torch.bfloat16)
)
self.norm = RMSNorm(config.hidden_size, device=device)
qkv_dim = config.head_dim * (
config.num_attention_heads + 2 * config.num_key_value_heads
)
self.qkv = torch.nn.Linear(
config.hidden_size, qkv_dim, device=device, dtype=torch.bfloat16
)
self.out = torch.nn.Linear(
config.head_dim * config.num_attention_heads,
config.hidden_size,
device=device,
dtype=torch.bfloat16,
)
self.sm_scale = 1 / math.sqrt(config.head_dim)
self.rope = RotaryEmbedding(
config.head_dim,
config.rope_theta,
torch.float32,
initial_context_length=config.initial_context_length,
scaling_factor=config.rope_scaling_factor,
ntk_alpha=config.rope_ntk_alpha,
ntk_beta=config.rope_ntk_beta,
device=device,
)
@record_function("attn")
def forward(self, x: torch.Tensor, cache: Cache | None = None) -> torch.Tensor:
batch_size, n_ctx, dim = x.shape
t = self.norm(x)
with record_function("qkv"):
qkv = self.qkv(t)
qkv_parts = (
self.num_attention_heads * self.head_dim,
self.num_key_value_heads * self.head_dim,
self.num_key_value_heads * self.head_dim
)
q, k, v = torch.split(qkv, qkv_parts, dim=-1)
q, k, v = q.contiguous(), k.contiguous(), v.contiguous()
q = q.view(batch_size, n_ctx, self.num_attention_heads, self.head_dim)
k = k.view(batch_size, n_ctx, self.num_key_value_heads, self.head_dim)
v = v.view(batch_size, n_ctx, self.num_key_value_heads, self.head_dim)
if cache is not None:
offset = cache.offset.clone()
q, k = self.rope(q, k, offset=offset)
k, v = cache.extend(k, v)
else:
offset = torch.zeros((1,), dtype=torch.long, device=x.device)
q, k = self.rope(q, k, offset=offset)
q = q.view(
batch_size,
n_ctx,
self.num_attention_heads // self.num_key_value_heads,
self.num_key_value_heads,
self.head_dim,
)
with record_function("attn_kernel"):
if n_ctx == 1:
t = attention_ref(
q,
k,
v,
self.sinks,
self.sm_scale,
self.sliding_window,
offset,
)
else:
t = attention(
q,
k,
v,
self.sinks,
self.sm_scale,
self.sliding_window,
offset,
)
if n_ctx < 64:
t1 = attention_ref(
q,
k,
v,
self.sinks,
self.sm_scale,
self.sliding_window,
offset,
)
torch.testing.assert_close(t, t1)
t = t1
with record_function("c_proj"):
t = self.out(t)
t = x + t
return t
MoE混合专家机制
MOE在现实大模型中的核心作用是在不显著增加计算成本的前提下,极大地扩展模型的总参数量,从而创造出能力更强、知识覆盖面更广的“专家型”模型。它通过一个智能路由系统,让每个输入只激活少量特定专家进行计算,实现了从“万亿参数模型”到“每次推理仅调用百亿参数”的高效转换,这使构建和部署超大规模模型在工程和商业上变得可行。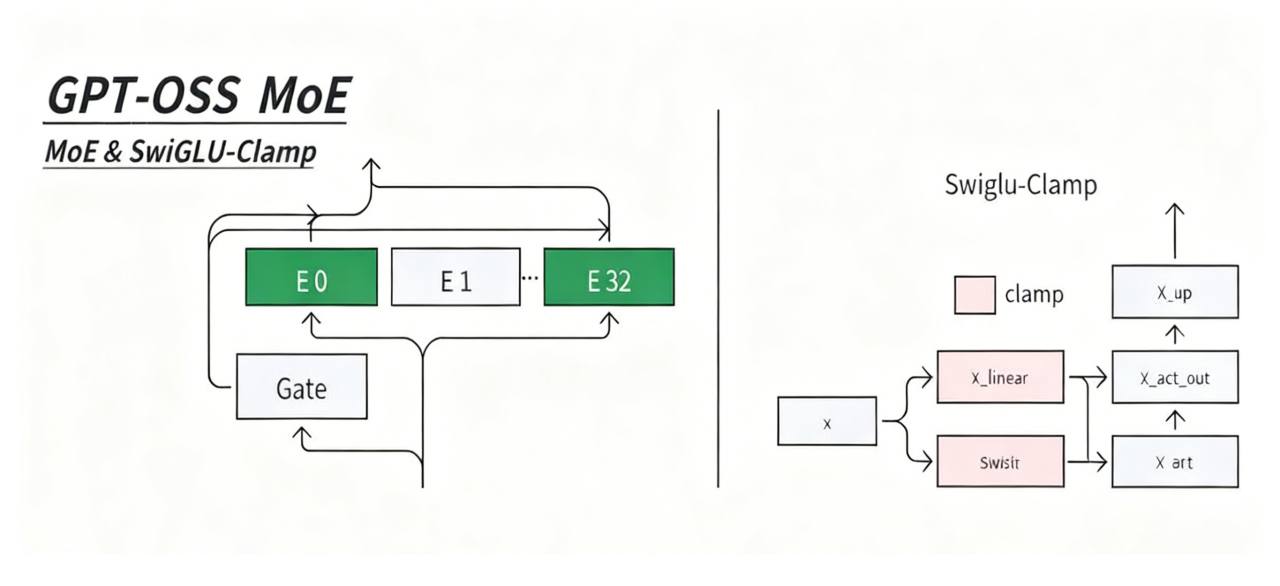
上图的 MoE&SwigLU-Clamp 部分是 MoE 层的内部逻辑。MoE 层靠Gate(门控)选专家(图里 E0 到 E32),只激活部分专家干活。每个专家内部用SwigLU-Clamp做前馈:在 SwigLU 的基础上加了 Clamp 操作,限制数值范围,让模型训练和推理更稳定。
pytorch后端
class MLPBlock(torch.nn.Module):
def __init__(
self,
config: ModelConfig,
device: torch.device | None = None,
):
super().__init__()
self.num_experts = config.num_experts
self.experts_per_token = config.experts_per_token
self.swiglu_limit = config.swiglu_limit
self.world_size = dist.get_world_size() if dist.is_initialized() else 1
self.norm = RMSNorm(config.hidden_size, device=device)
self.gate = torch.nn.Linear(
config.hidden_size, config.num_experts, device=device, dtype=torch.bfloat16
)
assert config.intermediate_size % self.world_size == 0
self.mlp1_weight = torch.nn.Parameter(
torch.empty(
(
config.num_experts,
config.intermediate_size * 2 // self.world_size,
config.hidden_size,
),
device=device,
dtype=torch.bfloat16,
)
)
self.mlp1_bias = torch.nn.Parameter(
torch.empty(
(config.num_experts, config.intermediate_size * 2 // self.world_size),
device=device,
dtype=torch.bfloat16,
)
)
self.mlp2_weight = torch.nn.Parameter(
torch.empty(
(
config.num_experts,
config.hidden_size,
config.intermediate_size // self.world_size,
),
device=device,
dtype=torch.bfloat16,
)
)
self.mlp2_bias = torch.nn.Parameter(
torch.empty(
(config.num_experts, config.hidden_size),
device=device,
dtype=torch.bfloat16,
)
)
def forward(self, x: torch.Tensor) -> torch.Tensor:
t = self.norm(x)
g = self.gate(t)
experts = torch.topk(g, k=self.experts_per_token, dim=-1, sorted=True)
expert_weights = torch.nn.functional.softmax(experts.values, dim=1)
expert_indices = experts.indices
# MLP #1 # 扩展维度
mlp1_weight = self.mlp1_weight[expert_indices, ...]
mlp1_bias = self.mlp1_bias[expert_indices, ...]
t = torch.einsum("beck,bk->bec", mlp1_weight, t) + mlp1_bias
t = swiglu(t, limit=self.swiglu_limit) # 激活函数
# MLP #2 # 收缩维度
mlp2_weight = self.mlp2_weight[expert_indices, ...]
mlp2_bias = self.mlp2_bias[expert_indices, ...]
t = torch.einsum("beck,bek->bec", mlp2_weight, t)
if self.world_size > 1:
dist.all_reduce(t, op=dist.ReduceOp.SUM)
t += mlp2_bias # 残差连接
# Weighted sum of experts
t = torch.einsum("bec,be->bc", t, expert_weights)
return x + t
triton后端
def moe(x, wg, w1, w1_mx, w2, w2_mx, bg, b1, b2, experts_per_token=4, num_experts=128, swiglu_limit=7.0, fused_act=True, interleaved=True):
if x.numel() == 0:
return x
pc1 = PrecisionConfig(weight_scale=w1_mx, flex_ctx=FlexCtx(rhs_data=InFlexData()))
pc2 = PrecisionConfig(weight_scale=w2_mx, flex_ctx=FlexCtx(rhs_data=InFlexData()))
pcg = PrecisionConfig(flex_ctx=FlexCtx(rhs_data=InFlexData()))
# 1. Gate计算 - 决定使用哪些专家
with record_function("wg"):
logits = matmul_ogs(x, wg, bg, precision_config=pcg)
# 2. 路由 - TopK专家选择
with record_function("routing"):
rdata, gather_indx, scatter_indx = routing(logits, experts_per_token, simulated_ep=1)
# 3. 专家计算 - 第一层MLP + SwiGLU激活
if fused_act:
assert interleaved, "Fused activation requires interleaved weights"
with record_function("w1+swiglu"):
act = FusedActivation(FnSpecs("swiglu", triton_kernels.swiglu.swiglu_fn, ("alpha", "limit")), (1.702, swiglu_limit), 2)
x = matmul_ogs(x, w1, b1, rdata, gather_indx=gather_indx, precision_config=pc1, fused_activation=act)
else:
with record_function("w1"):
x = matmul_ogs(x, w1, b1, rdata, gather_indx=gather_indx, precision_config=pc1)
with record_function("swiglu"):
x = swiglu(x, limit=swiglu_limit, interleaved=interleaved)
# 4. 专家计算 - 第二层MLP
with record_function("w2"):
x = matmul_ogs(x, w2, b2, rdata, scatter_indx=scatter_indx, precision_config=pc2, gammas=rdata.gate_scal)
return x
激活函数
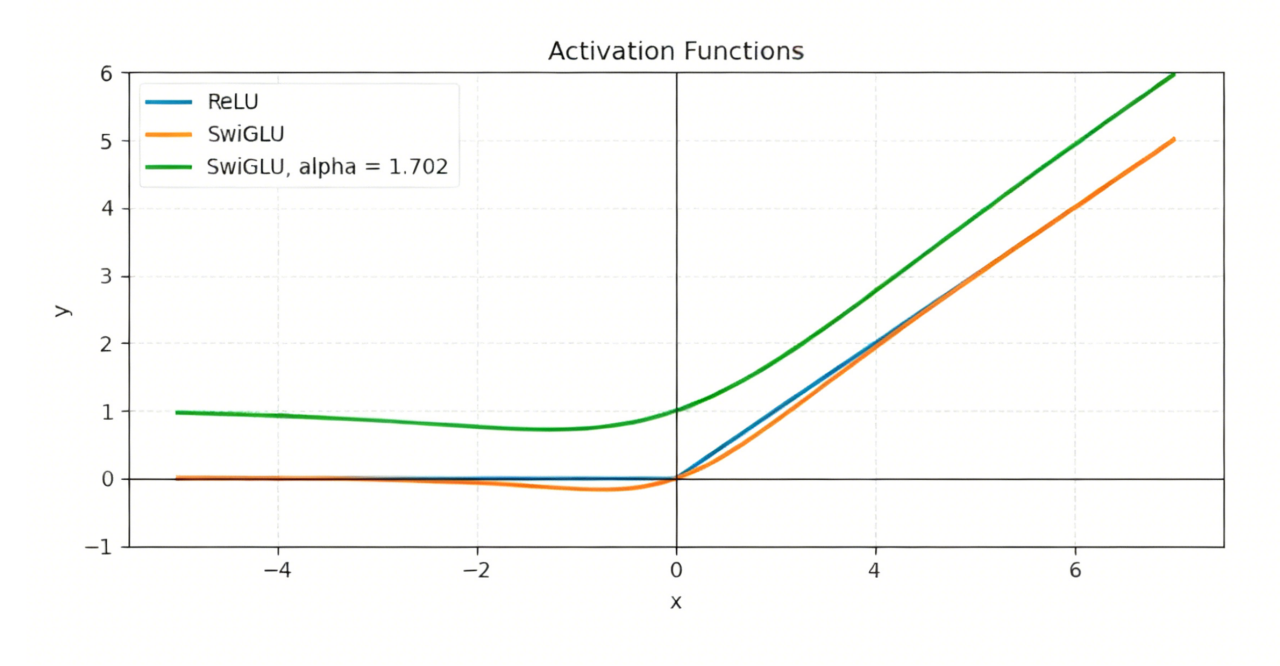
激活函数的核心作用是为模型注入非线性能力。
大模型的每一层的输入输出都是一个线性求和的过程,下一层的输出只是承接了上一层输入函数的线性变换,如果没有激活函数,线性层的计算只能得到线性结果,无论堆叠多少层,整个网络都等价于一个单层线性变换。
激活函数通过引入非线性变换,让神经网络能够强调重要的特征模式、抑制无关的噪声,组合出任意复杂的决策边界,从而让深度网络真正具备学习和推理的能力。它将基础的加权求和,升级为对复杂现实的拟合与理解,是模型获得智能的核心开关。
相对于其他大模型,GPT-OSS 激活函数的实现中使用了一个clamp函数。SwigLU 的输出可能会因为输入的波动出现 “特别大的正数” 或 “特别小的负数”,这些极端数值会让模型后续计算 “跑偏”(比如梯度爆炸、输出不稳定),clamp函数在这里是 “范围限制器”,作用是把 SwigLU 的输出控制在指定区间内,避免数值太夸张导致模型不稳定。
它的处理逻辑非常简单,需要设定一个最小值(min)和最大值(max)。当输入的数值小于 min 时,clamp 会把它强行改成 min;当输入的数值大于 max 时,clamp 会把它强行改成 max;数值在 min 和 max 之间时,保持不变。
pytorch后端
def swiglu(x, alpha: float = 1.702, limit: float = 7.0):
x_glu, x_linear = x[..., ::2], x[..., 1::2]
# Clamp the input values
x_glu = x_glu.clamp(min=None, max=limit)
x_linear = x_linear.clamp(min=-limit, max=limit)
out_glu = x_glu * torch.sigmoid(alpha * x_glu)
# Note we add an extra bias of 1 to the linear layer
return out_glu * (x_linear + 1)
triton后端
def swiglu(x, alpha: float = 1.702, limit: float = 7.0, interleaved: bool = True):
if interleaved:
x_glu, x_linear = x[..., ::2], x[..., 1::2] # 分离奇偶维度:将5760维分成两个2880维的路径
else:
x_glu, x_linear = torch.chunk(x, 2, dim=-1)
x_glu = x_glu.clamp(min=None, max=limit)
x_linear = x_linear.clamp(min=-limit, max=limit)
out_glu = x_glu * torch.sigmoid(alpha * x_glu) # 门控机制:一条路径学习"门",另一条路径学习"内容"
return out_glu * (x_linear + 1) # 线性部分 + 门控部分 信息选择性通过:只有重要的信息才会被激活传递
均方根层归一化
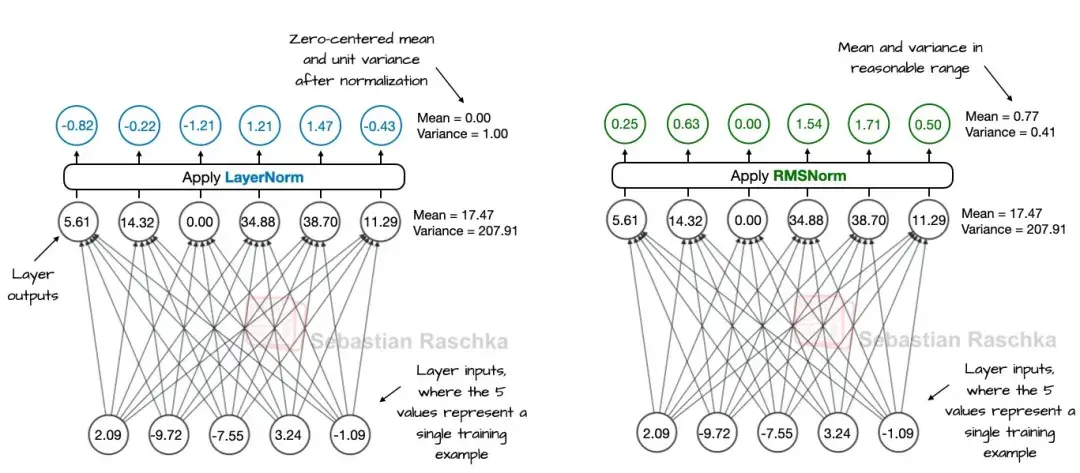
Normalization(归一化) 在机器学习和深度学习中是一种重要的数据预处理技术。它通过将输入数据或神经网络层的激活值限制在特定的范围内(如0到1之间),来加速训练收敛,防止梯度消失或爆炸,提高模型的泛化能力和数值稳定性。
常见的归一化方法包括Batch Normalization、Layer Normalization、Instance Normalization等。
GPT-OSS中使用的是均方根层归一化,它对同一组底层数据的处理更 “温和”—— 调整后均值是 0.77、方差 0.41,数值都落在合理范围里,但没有强行压成均值 0。相当于把 “参差不齐的队伍” 整理成 “松散但有序的队列”,保留了数据原有的一些趋势,同时又避免了极端值。(如下图右)
# pytorch和triton后端共用
class RMSNorm(torch.nn.Module):
def __init__(
self, num_features: int, eps: float = 1e-05, device: torch.device | None = None
):
super().__init__()
self.num_features = num_features
self.eps = eps
self.scale = torch.nn.Parameter(
torch.ones(num_features, device=device, dtype=torch.float32)
)
def forward(self, x: torch.Tensor) -> torch.Tensor:
assert x.shape[-1] == self.num_features
t, dtype = x.float(), x.dtype
t = t * torch.rsqrt(torch.mean(t**2, dim=-1, keepdim=True) + self.eps)
return (t * self.scale).to(dtype)

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 20
20 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)