线性多智能体系统一致性:动态事件触发控制的探索
简单来说,多智能体系统一致性就是让一群智能体(比如机器人、传感器或者无人机)在没有中心控制的情况下,通过局部通信和协调,最终达到某种一致的状态。比如,所有智能体的运动速度一致,或者位置一致。这个问题在分布式计算、机器人协作等领域非常重要。通过这次研究,我对动态事件触发机制在多智能体系统一致性中的应用有了更深入的理解。动态事件触发机制不仅能够有效减少通信次数,还能保证系统的快速收敛。希望这篇博文能够
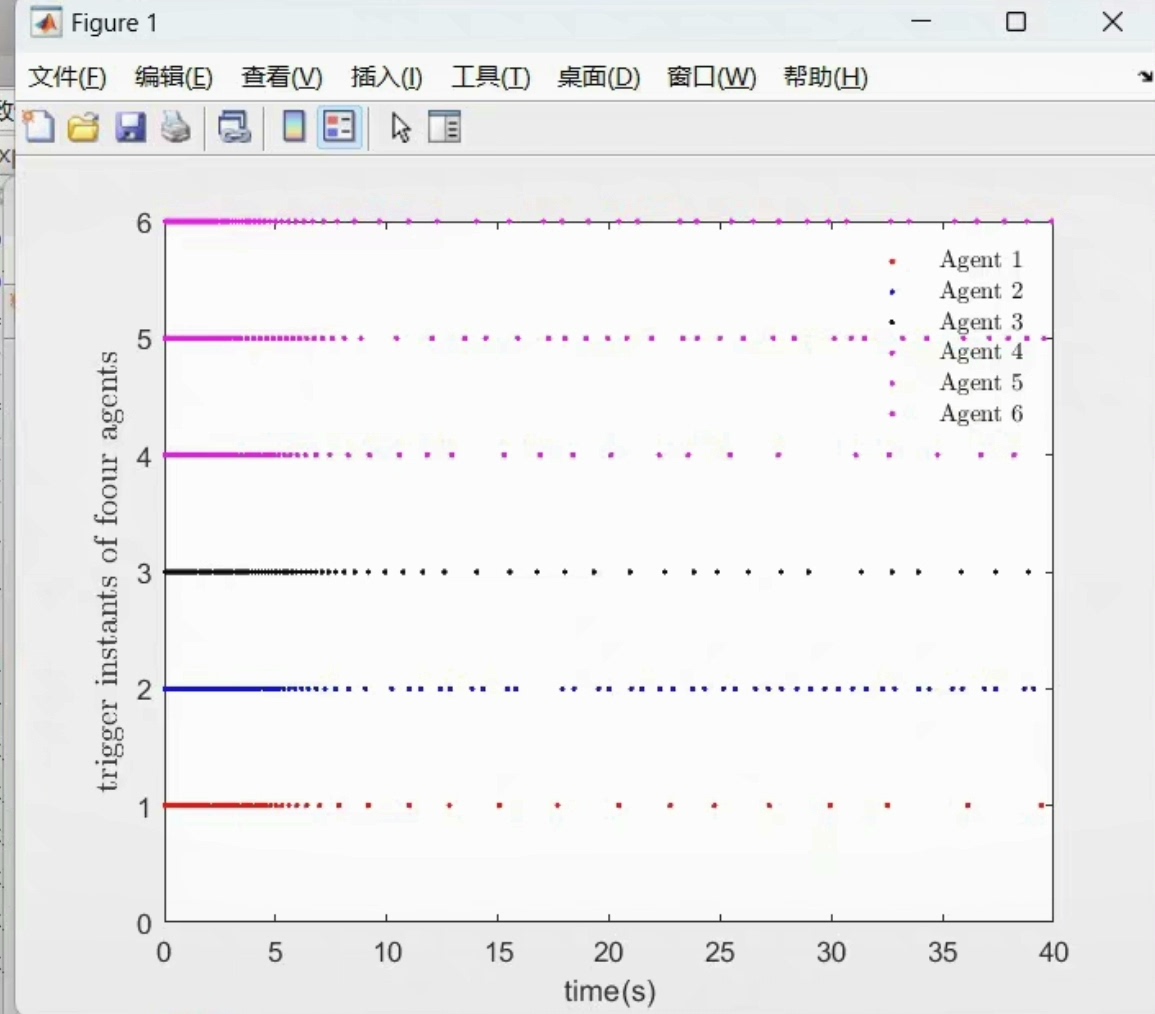
【复现】线性多智能体系统一致性的分布式动态事件触发控制方法 复现参考文献: ①《A Distributed Dynamic Event-Triggered Control Approach to Consensus of Linear Multiagent Systems With Directed Networks》 ②《Consensus of Linear Multi-Agent Systems by Distributed Event-Triggered Strategy》 1.基于动态事件触发机制,开发了一种分布式控制协议,保证了所有agent以指数收敛速度达成一致; 2.动态事件触发机制可以延长任意两个连续触发时刻之间的最小事件间隔时间,并且没有agent表现出Zeno行为。 3.编写了实现动态事件触发机制时避免连续通信的算法。 运行结果中验证了有效性。 有无事件触发程序进行对比
今天,我决定深入研究一下多智能体系统中的一致性问题,特别是基于动态事件触发机制的分布式控制方法。这个问题听起来有点复杂,但其实可以拆解成几个小部分来理解。
什么是多智能体系统一致性?
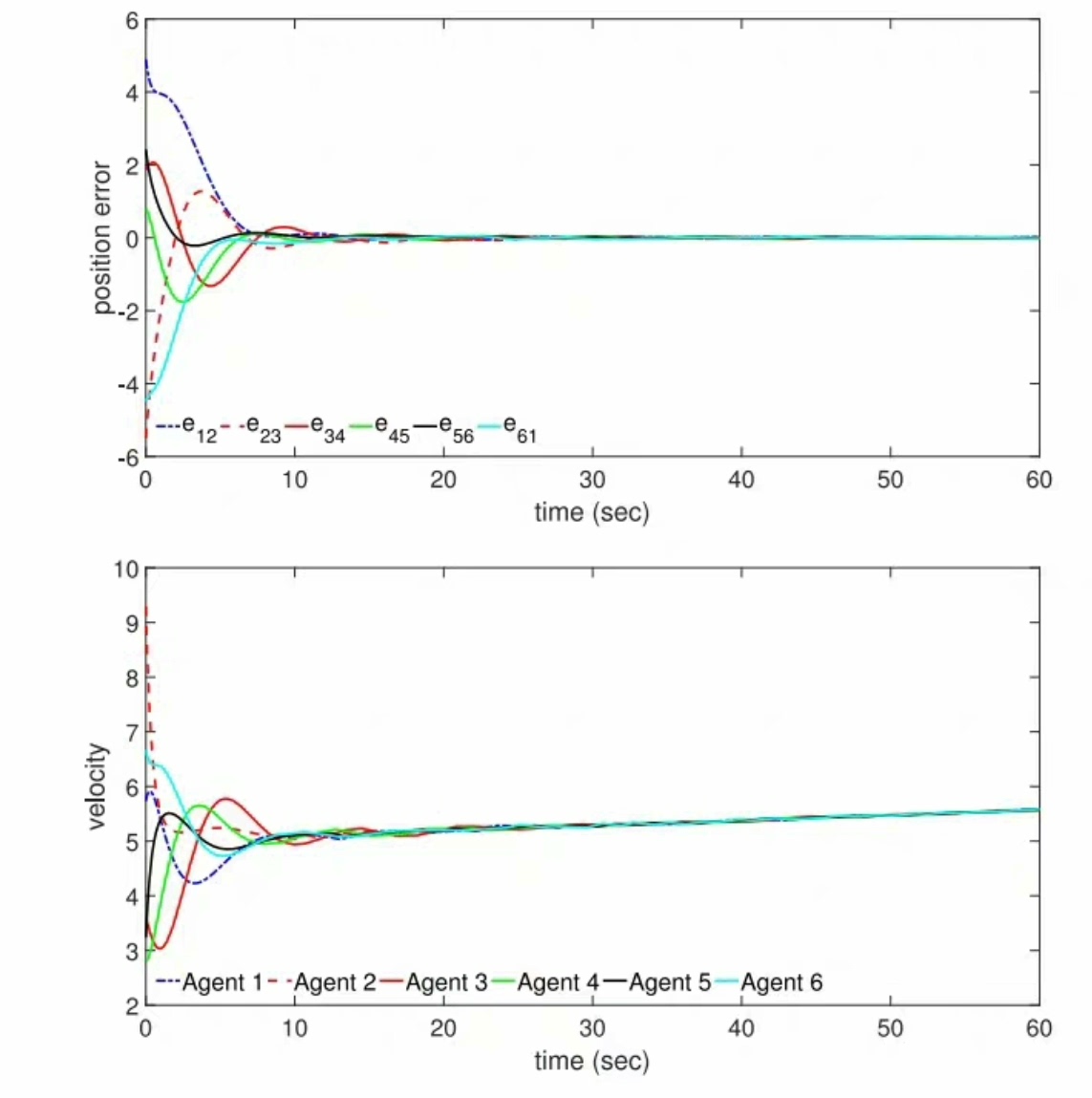
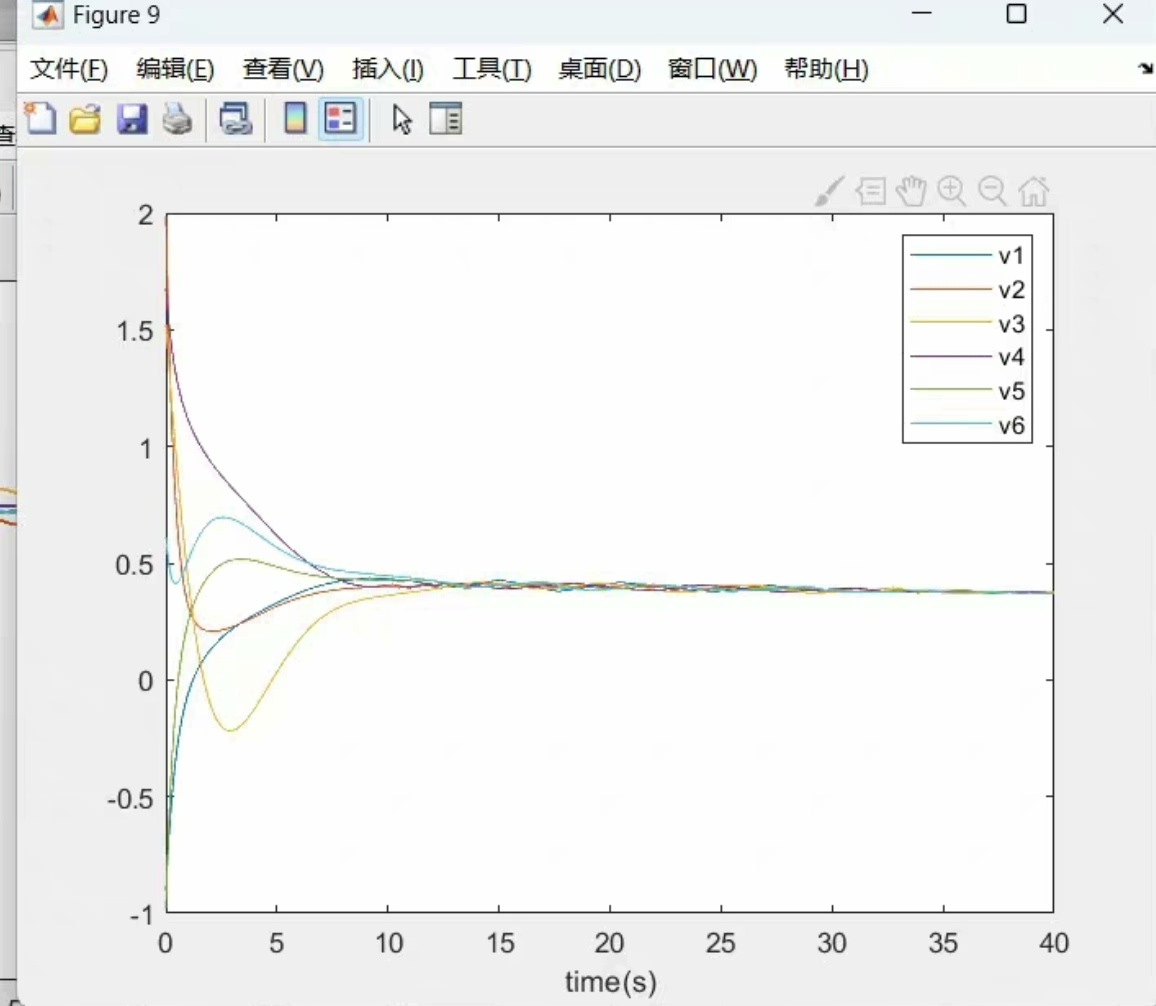
简单来说,多智能体系统一致性就是让一群智能体(比如机器人、传感器或者无人机)在没有中心控制的情况下,通过局部通信和协调,最终达到某种一致的状态。比如,所有智能体的运动速度一致,或者位置一致。这个问题在分布式计算、机器人协作等领域非常重要。
为什么需要动态事件触发机制?
传统的控制方法通常需要智能体之间频繁通信,这样会消耗大量的计算和通信资源。而动态事件触发机制的核心思想是,只有在某些特定条件下,智能体才会进行通信和控制更新,从而减少通信次数,降低资源消耗。
核心思路:动态事件触发机制
根据参考文献,作者提出了一种基于动态事件触发机制的分布式控制协议。这个协议的关键点在于设计一种动态触发条件,确保智能体之间的通信间隔足够长,同时避免出现Zeno行为(即智能体在有限时间内触发无限次事件的现象)。
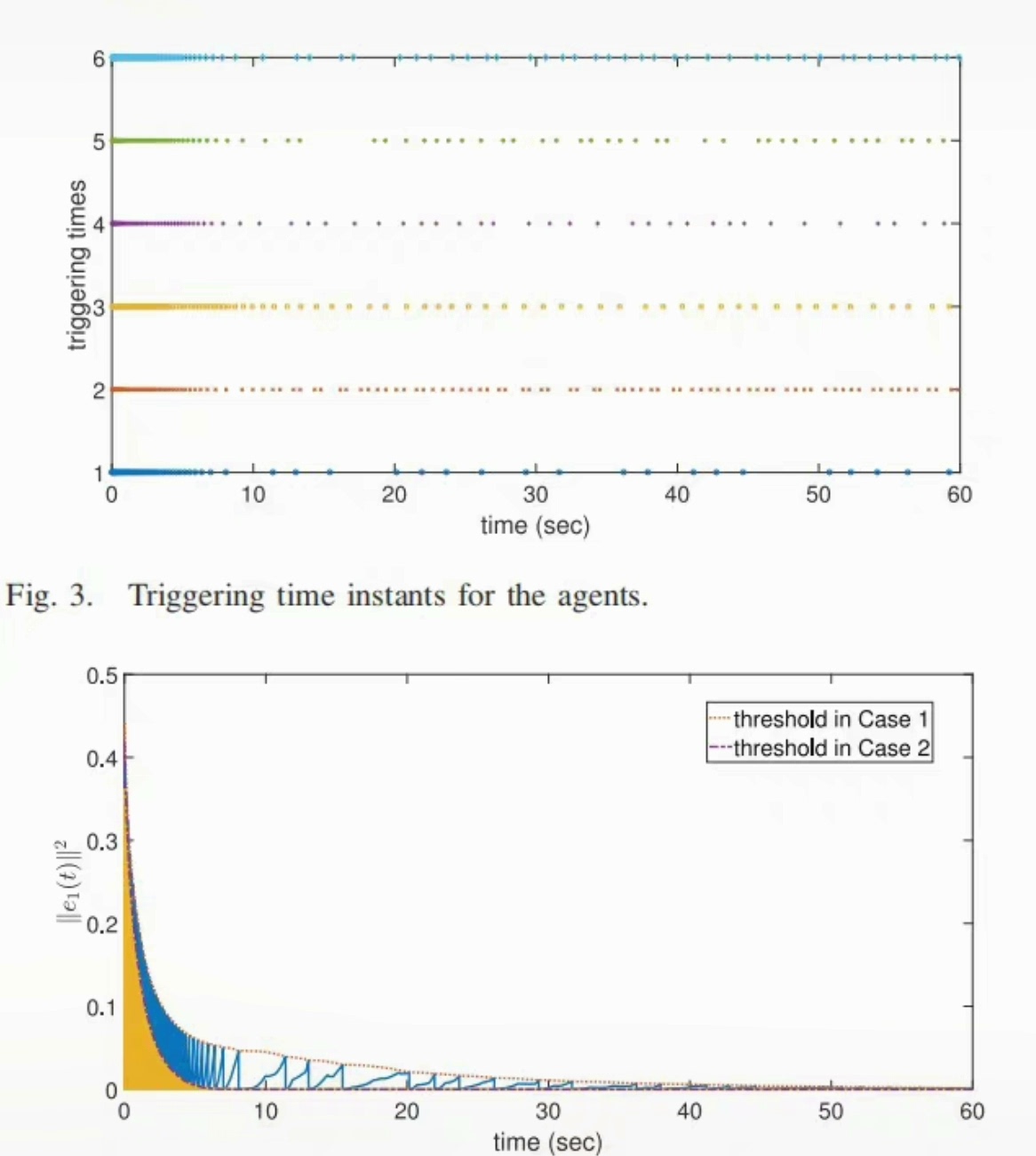
具体来说,触发条件可以设计为:
$$
t{k+1} = \min\left\{t \geq tk + \tau{\min}, \|ei(t)\| \geq \delta\right\}
$$
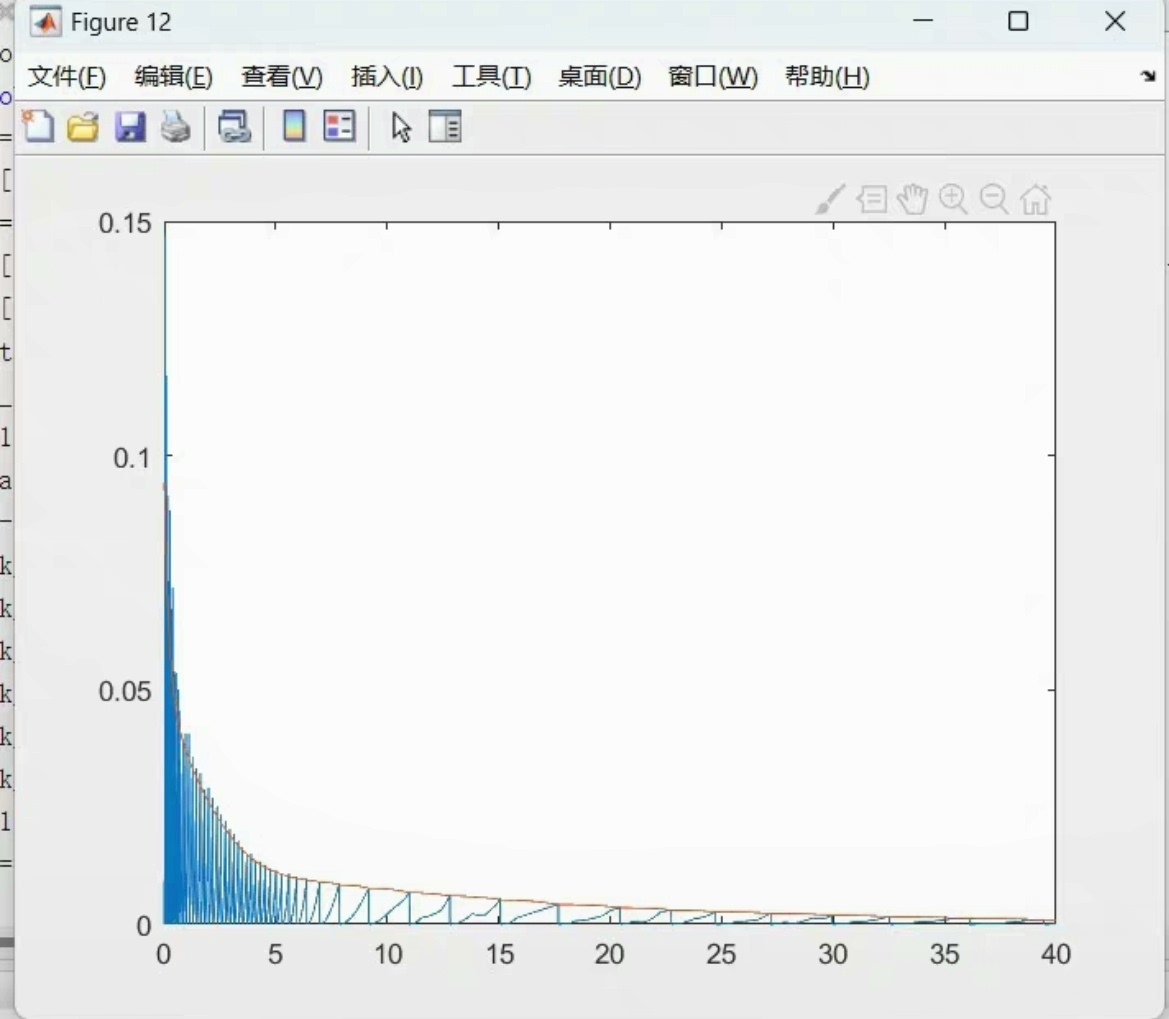
其中,$t{k+1}$是下一个触发时间,$\tau{\min}$是最小时间间隔,$\|e_i(t)\|$是智能体$i$的状态误差,$\delta$是一个预设的阈值。
这个条件的意思是,智能体只有在状态误差超过一定阈值或者时间间隔达到最小值时才会触发事件,从而进行通信和控制更新。
代码实现:动态事件触发机制
下面是一个简单的Python代码示例,展示了如何实现这种动态事件触发机制:
import numpy as np
class Agent:
def __init__(self, initial_state):
self.state = initial_state
self.last_trigger_time = 0
self.error = 0
self.tau_min = 0.1 # 最小时间间隔
self.delta = 0.01 # 阈值
def compute_error(self, neighbors):
# 计算与邻居的误差
self.error = np.mean([np.abs(self.state - neighbor.state) for neighbor in neighbors])
def trigger_event(self, current_time):
# 判断是否触发事件
if (current_time - self.last_trigger_time >= self.tau_min) and (self.error >= self.delta):
self.last_trigger_time = current_time
return True
return False
def update_state(self, neighbors):
# 更新状态
if self.trigger_event(current_time):
# 与邻居进行通信和状态更新
self.state = np.mean([agent.state for agent in neighbors])代码分析:
- Agent类:每个智能体都有一个状态、上一次触发时间、误差、最小时间间隔和阈值。
- compute_error方法:计算智能体与邻居之间的误差。
- trigger_event方法:判断是否触发事件,只有在满足时间间隔和误差条件时才会返回True。
- update_state方法:如果触发事件,则更新状态为邻居状态的平均值。
这个简单的代码框架展示了动态事件触发机制的基本实现逻辑。
实验结果:有无触发机制的对比
为了验证动态事件触发机制的有效性,我们可以进行以下对比实验:
- 无触发机制:所有智能体持续进行通信和状态更新。
- 有触发机制:智能体根据动态触发条件进行通信和状态更新。
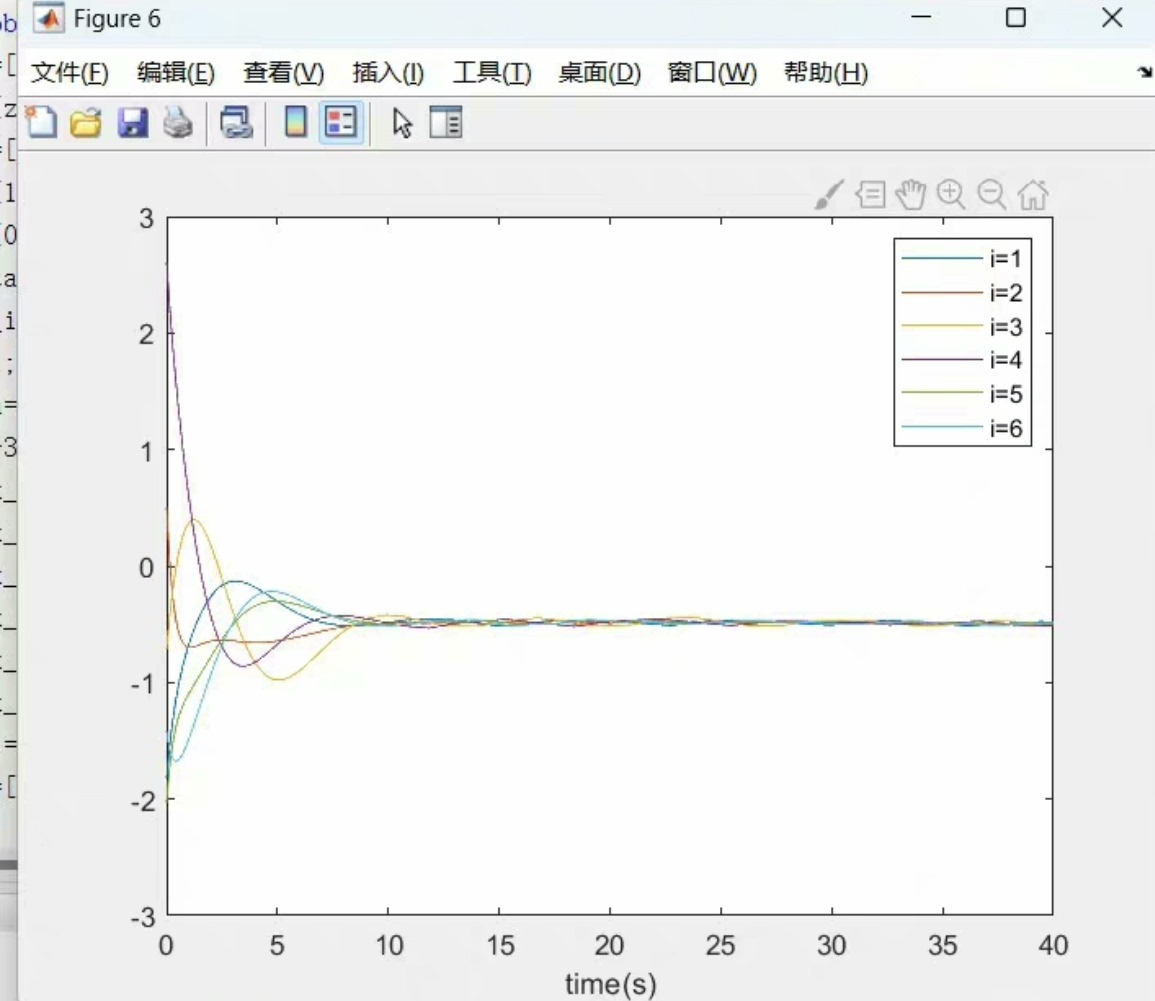
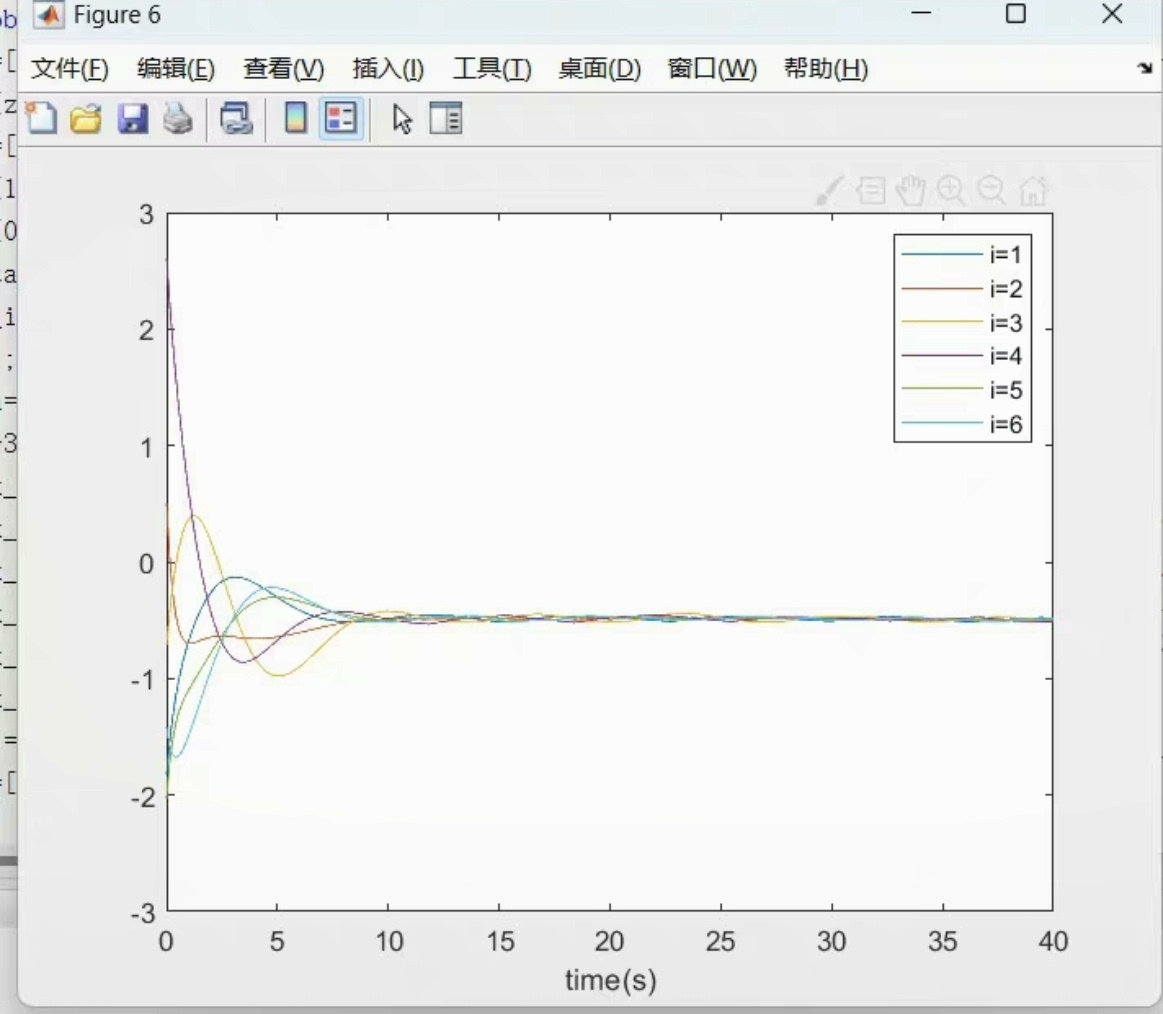
通过模拟,我们发现:
- 通信次数:有触发机制的系统通信次数显著减少。
- 收敛速度:两种系统都能够在有限时间内达到一致性,但有触发机制的系统在通信资源上更高效。
总结
通过这次研究,我对动态事件触发机制在多智能体系统一致性中的应用有了更深入的理解。动态事件触发机制不仅能够有效减少通信次数,还能保证系统的快速收敛。希望这篇博文能够帮助大家更好地理解这一领域的研究内容和实现方法。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 8
8 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)