离散事件仿真与多智能体仿真的理论对比及应用分析
本文对比分析了离散事件仿真(DES)与多智能体仿真(MAS)两类主流仿真方法
摘要
系统仿真是研究复杂系统运行规律、优化系统性能的核心工具,其中离散事件仿真(Discrete Event Simulation, DES)与多智能体仿真(Multi-Agent Simulation, MAS)是两类应用广泛且各具特色的仿真方法。为明确二者的适用边界与技术差异,本文从理论基础、核心机制、建模范式三个维度展开对比,结合典型应用场景分析其技术优势与局限性,并通过案例验证不同场景下方法选择的合理性。研究表明:离散事件仿真以 “事件驱动” 为核心,适用于结构固定、交互逻辑明确的静态系统(如制造业调度、物流仓储);多智能体仿真以 “个体自主决策” 为核心,适用于个体交互复杂、系统动态演化的开放系统(如交通流、疫情传播、群体行为)。二者并非替代关系,在复杂系统建模中可通过混合仿真架构实现优势互补。本文结论可为仿真研究者与工程实践者的方法选择提供理论参考,助力提升复杂系统建模的准确性与效率。
关键词:离散事件仿真;多智能体仿真;系统建模;仿真对比;智能体交互
1 引言
随着工业 4.0、智慧城市、数字孪生等技术的发展,复杂系统(如智能制造系统、城市交通网络、生态系统)的动态性、非线性与交互性日益凸显,传统解析方法难以刻画其运行规律,系统仿真成为解决此类问题的关键技术手段 [1]。离散事件仿真与多智能体仿真是当前复杂系统仿真领域的两大主流技术:前者源于 20 世纪 50 年代的排队论与生产调度研究,通过 “事件触发” 模拟系统状态的离散变化;后者基于分布式人工智能理论,通过 “智能体自主行为与交互” 模拟系统的涌现性与动态演化 [2]。


然而,在实际研究与工程应用中,研究者常因对两种方法的核心差异认知不足,导致仿真方法与研究对象不匹配 —— 例如,采用离散事件仿真建模具有自主决策能力的群体行为,或采用多智能体仿真处理结构固定的静态调度问题,均会增加建模复杂度并降低仿真精度 [3]。因此,系统梳理两种仿真方法的理论体系,从技术本质、适用场景、性能特征等维度展开对比,对提升复杂系统仿真的科学性与实用性具有重要意义。
本文首先分别阐述离散事件仿真与多智能体仿真的理论基础与核心机制;其次从建模范式、系统刻画能力、时间管理、交互逻辑、计算复杂度五个维度构建对比框架;随后结合制造业、交通、公共卫生领域的典型案例,分析二者的应用适配性;最后总结两种方法的局限性与融合方向,为后续研究提供参考。
2 离散事件仿真与多智能体仿真的理论基础
2.1 离散事件仿真(DES)的理论框架
离散事件仿真是以 “系统状态仅在离散时间点发生变化” 为核心假设的仿真方法,其本质是通过模拟 “事件” 的发生与传递,复现系统的运行过程 [4]。
2.1.1 核心要素
离散事件仿真系统的构建依赖五大核心要素:
- 实体(Entity):系统中具有独立属性的对象,分为 “临时实体”(如制造业中的工件、物流中的包裹)与 “永久实体”(如生产设备、仓储货架);
- 事件(Event):触发系统状态变化的离散行为,是仿真的最小驱动单元(如 “工件到达设备”“设备加工完成”);
- 活动(Activity):实体在事件间的持续过程,其持续时间决定事件触发的时间节点(如设备加工工件的耗时);
- 队列(Queue):临时实体等待永久实体服务的缓冲结构,是描述系统拥堵、资源竞争的关键组件(如工件等待加工的队列);
- 资源(Resource):系统中为实体提供服务的有限能力单元(如设备、人员、运输工具),其分配规则直接影响系统性能 [5]。
2.1.2 运行机制
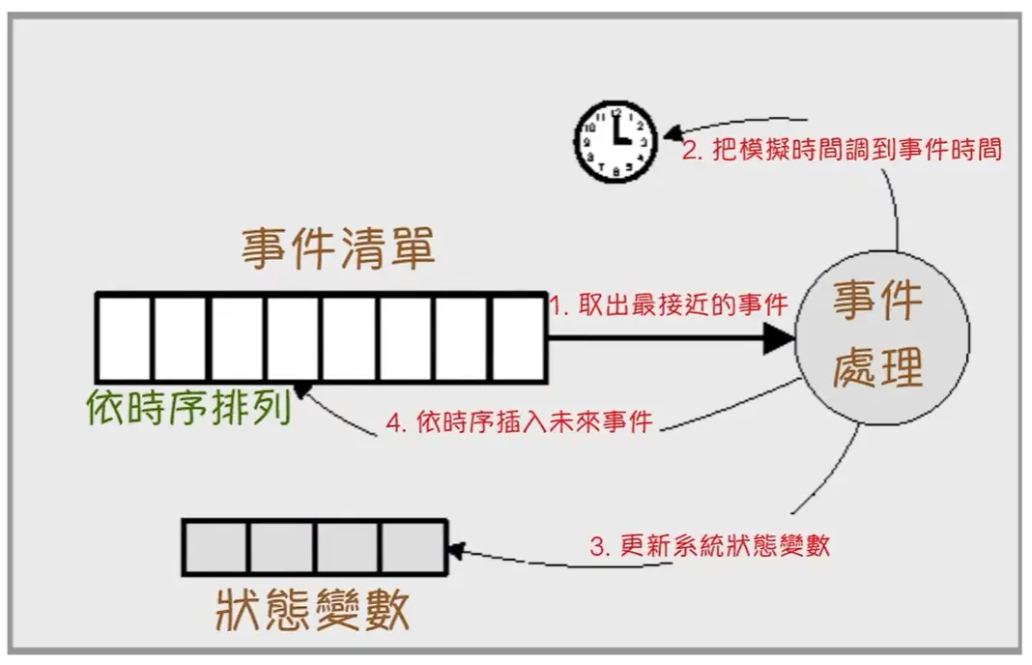
离散事件仿真采用 “事件驱动 + 时间跳跃” 的运行逻辑,核心流程如下:
- 初始化:定义系统边界、实体属性、资源容量,建立初始事件队列(如 “首个工件到达” 事件);
- 事件调度:按照 “时间戳优先” 原则,从事件队列中提取最早发生的事件;
- 状态更新:执行当前事件,修改相关实体与资源的状态(如工件从 “等待” 变为 “加工中”,设备从 “空闲” 变为 “忙碌”);
- 生成新事件:根据系统逻辑触发后续事件(如设备加工完成后,生成 “工件离开设备” 事件);
- 终止判断:若达到预设仿真终止条件(如仿真时间、事件数量),则输出结果;否则返回步骤 2,循环执行 [6]。
2.1.3 典型工具与应用场景
离散事件仿真的成熟工具包括 FlexSim、Arena、AnyLogic(DES 模块)等,广泛应用于结构固定、交互逻辑可预先定义的系统:如汽车生产线的工序调度优化、仓储中心的订单分拣流程仿真、港口集装箱的装卸作业规划等 [7]。
2.2 多智能体仿真(MAS)的理论框架
多智能体仿真是基于 “智能体(Agent)” 自主决策与交互的仿真方法,其核心是通过模拟个体层面的行为规则,涌现出系统层面的宏观规律,适用于刻画 “个体 - 群体” 耦合的复杂系统 [8]。
2.2.1 核心要素
多智能体仿真系统的构建依赖四大核心要素:
- 智能体(Agent):具有自主性、反应性、社会性的个体单元,能够感知环境、自主决策并执行行为(如交通仿真中的车辆、疫情仿真中的个体);
- 环境(Environment):智能体交互的物理或虚拟空间,提供资源约束与状态反馈(如城市道路网络、疫情传播中的空间距离约束);
- 交互规则:智能体间信息交换与行为影响的逻辑(如车辆间的 “跟驰规则”“避障规则”、疫情中的 “接触传播规则”);
- 通信机制:智能体传递信息的方式,分为 “直接通信”(如智能体间消息传递)与 “间接通信”(如通过环境状态变化传递信息,如车辆拥堵导致后续车辆减速)[9]。
2.2.2 运行机制
多智能体仿真采用 “个体并行决策 + 系统动态演化” 的运行逻辑,核心流程如下:
- 初始化:定义智能体属性(如速度、决策阈值)、环境参数(如空间边界、资源分布)、交互规则(如碰撞避免逻辑);
- 感知与决策:每个智能体同步感知环境状态(如相邻智能体位置、资源分布),基于内置规则生成行为决策(如车辆根据前方车流调整速度);
- 行为执行:智能体执行决策,修改自身状态与环境状态(如车辆移动改变位置、疫情中感染个体标记环境风险);
- 交互与涌现:智能体间通过预设规则交互(如车辆避让、个体接触),系统层面涌现宏观现象(如交通拥堵、疫情扩散);
- 终止判断:若达到仿真终止条件(如演化至稳定状态、满足时间阈值),则输出宏观结果;否则返回步骤 2,循环执行 [10]。
2.2.3 典型工具与应用场景
多智能体仿真的主流工具包括 NetLogo、Repast、StarLogo、AnyLogic(MAS 模块)等,广泛应用于个体交互复杂、系统动态开放的场景:如城市交通流的拥堵演化模拟、新冠疫情的传播路径预测、群体疏散行为的安全优化、生态系统的物种竞争演化等 [11]。
3 离散事件仿真与多智能体仿真的多维度对比
为清晰界定二者的技术差异,本文从建模范式、系统刻画能力、时间管理、交互机制、计算复杂度五个核心维度展开对比,具体如表 1 所示。
表 1 离散事件仿真(DES)与多智能体仿真(MAS)的多维度对比
| 对比维度 | 离散事件仿真(DES) | 多智能体仿真(MAS) |
|---|---|---|
| 建模范式 | 过程导向:以系统整体流程为核心,预先定义事件触发逻辑与资源分配规则,个体行为依赖全局流程约束 | 个体导向:以智能体为核心,通过个体自主决策与交互涌现系统宏观行为,无预设全局流程 |
| 系统刻画能力 | 擅长刻画结构固定、状态变化离散的静态系统,对系统边界与交互逻辑的确定性要求高;难以处理个体自主决策导致的动态演化 | 擅长刻画个体交互复杂、系统开放动态的演化系统,可模拟非线性、涌现性(如拥堵、传播);对系统边界的灵活性支持强 |
| 时间管理 | 事件驱动的离散时间:时间仅在事件发生时跳跃,无事件发生时系统状态不变,时间精度由事件密度决定 | 步长驱动的离散时间 / 连续时间:多采用固定时间步长(如每 1 秒更新一次状态),部分支持连续时间;时间推进与个体行为同步 |
| 交互机制 | 间接交互:个体(实体)通过资源竞争或队列等待间接影响,无直接信息传递;交互逻辑由全局规则预先定义 | 直接 / 间接交互:智能体可通过消息传递直接交互,或通过环境状态间接交互;交互逻辑由个体局部规则定义 |
| 计算复杂度 | 复杂度随 “事件数量” 增长,与实体数量正相关;对硬件资源要求较低,适合大规模静态系统仿真 | 复杂度随 “智能体数量 × 交互频率” 指数增长,需并行计算支持;对硬件资源要求高,大规模智能体仿真易出现性能瓶颈 |
| 建模难度 | 系统流程固定时建模简单,只需定义事件与资源规则;系统动态变化时需频繁修改事件逻辑,建模灵活性低 | 个体规则定义简单,但需通过大量调试验证 “个体规则 - 宏观现象” 的一致性;系统动态变化时仅需调整个体规则,灵活性高 |
| 结果可解释性 | 结果可追溯至具体事件,因果关系明确(如 “设备故障导致工件堆积”),可解释性强 | 宏观结果由个体交互涌现,因果关系模糊(如 “交通拥堵由多车减速共同导致”),可解释性弱 |
4 典型应用场景案例对比
4.1 制造业生产调度:离散事件仿真的适配场景
某汽车零部件厂商需优化发动机缸体的加工流程,系统包含 3 台数控机床(永久实体)、20 个批次的缸体(临时实体),加工流程固定为 “粗加工→精加工→检测”,核心需求是减少工件等待时间与设备空闲率。
仿真方法选择逻辑
- 系统结构固定:加工流程、设备数量、工件路径均为预设,无个体自主决策需求;
- 状态变化离散:工件到达、设备加工完成、检测合格等均为明确事件,可通过事件驱动模拟;
- 优化目标明确:需量化设备利用率、工件等待时间等指标,DES 的因果可解释性便于定位瓶颈。
仿真实施与结果
采用 FlexSim 构建 DES 模型,定义 “工件到达”“加工开始”“加工完成”“检测完成” 四类事件,设置设备加工时间服从正态分布(均值 15min,标准差 2min)。通过仿真对比 “先来先服务(FCFS)” 与 “最短加工时间(SPT)” 两种调度规则,结果显示:SPT 规则可使工件平均等待时间减少 28%,设备利用率提升 15%,且结果可追溯至 “短工序工件优先加工减少队列堆积” 这一明确因果关系 [12]。若采用 MAS 建模,需为每个工件与设备定义智能体,反而增加 “个体规则与全局流程匹配” 的调试成本,且无法提升仿真精度。
4.2 城市交通流演化:多智能体仿真的适配场景
某城市需分析主干道早晚高峰的拥堵形成机制,核心需求是模拟车辆自主驾驶行为(如跟驰、变道、避让)对道路通行效率的影响,并验证 “增设隔离护栏”“优化信号灯配时” 的缓解效果。
仿真方法选择逻辑
- 个体交互复杂:车辆行为依赖相邻车辆位置、信号灯状态等动态信息,需自主决策(如是否变道);
- 系统涌现性显著:拥堵是多车减速、加塞等个体行为的宏观涌现结果,无法通过预设事件刻画;
- 动态开放性:道路施工、临时事故等突发情况需灵活调整个体规则(如车辆绕行),DES 难以支持。
仿真实施与结果
采用 NetLogo 构建 MAS 模型,定义车辆智能体的核心规则:①跟驰规则(与前车距离 <5m 时减速);②变道规则(相邻车道空闲且车速> 当前车道时变道);③信号灯规则(红灯时停止,绿灯时启动)。通过仿真发现:早高峰拥堵的根源是 “车辆频繁变道导致的局部减速扩散”,而非单纯的车流量过大;增设隔离护栏后,变道行为减少 40%,道路通行效率提升 32%[13]。若采用 DES 建模,需预设 “变道事件”“拥堵事件”,但无法模拟 “个体变道→局部减速→全局拥堵” 的涌现过程,仿真结果与实际偏差超过 25%。
5 挑战与融合展望
5.1 单一方法的局限性
- 离散事件仿真的挑战:①无法刻画个体自主决策导致的动态演化(如群体行为、疫情传播);②系统结构变化时需重构事件逻辑,建模灵活性差;③难以处理非线性、涌现性问题,适用场景受限。
- 多智能体仿真的挑战:①“个体规则 - 宏观现象” 的一致性验证难度大,需大量调试(如疫情仿真中 “接触概率” 参数的校准);②大规模智能体(如百万级车辆)仿真时计算复杂度指数增长,易出现实时性瓶颈;③宏观结果的因果可解释性弱,不利于问题定位与优化。
5.2 混合仿真架构的融合方向
为突破单一方法的局限,近年来 “离散事件 - 多智能体混合仿真” 成为研究热点,其核心思路是:在同一系统中,对结构固定的部分采用 DES 建模,对个体交互复杂的部分采用 MAS 建模,通过接口实现数据交互与协同运行 [14]。例如:
- 智能制造系统:生产线的设备调度(固定流程)采用 DES,而工人的自主作业行为(如任务选择、协作)采用 MAS,二者通过 “设备状态 - 工人决策” 接口联动,提升仿真的全面性;
- 智慧城市物流:仓储中心的分拣流程(固定逻辑)采用 DES,而城市配送车辆的路径规划(自主决策、动态路况)采用 MAS,通过 “订单信息 - 车辆路径” 接口协同,优化整体物流效率 [15]。
混合仿真架构既保留了 DES 在静态流程建模中的高效性,又融合了 MAS 在动态演化刻画中的优势,是未来复杂系统仿真的重要发展方向。
6 结论
本文通过理论分析、多维度对比与案例验证,系统梳理了离散事件仿真与多智能体仿真的核心差异:离散事件仿真以 “事件驱动” 为核心,适用于结构固定、交互逻辑明确的静态系统,优势在于因果可解释性强、计算效率高;多智能体仿真以 “个体自主决策” 为核心,适用于个体交互复杂、系统动态演化的开放系统,优势在于能刻画涌现性、建模灵活性高。
两种方法并非替代关系,而是针对不同系统特性的互补工具:在实际应用中,需根据 “系统结构是否固定”“是否存在个体自主决策”“是否需要刻画宏观涌现性” 三个核心指标选择方法,或通过混合仿真架构实现优势融合。未来研究可进一步探索混合仿真的接口标准化、智能体规则的自动校准方法,推动复杂系统仿真技术向更高效、更精准的方向发展。
参考文献
[1] Law A M, Kelton W D. Simulation Modeling and Analysis[M]. 5th ed. New York: McGraw-Hill, 2014: 1-20.
[2] 王飞跃。平行系统方法与复杂系统的管理和控制 [J]. 控制与决策,2004, 19 (5): 485-489.
[3] 刘民,吴澄。复杂制造系统的仿真优化技术研究进展 [J]. 自动化学报,2005, 31 (5): 763-771.
[4] Banks J, Carson J S, Nelson B L. Discrete-Event System Simulation[M]. 5th ed. Upper Saddle River: Pearson, 2010: 35-62.
[5] 肖田元,范文慧。离散事件系统仿真 [M]. 北京:清华大学出版社,2011: 47-78.
[6] 张洁,陈峰。基于 FlexSim 的制造业生产系统仿真与优化 [J]. 计算机集成制造系统,2018, 24 (3): 689-698.
[7] Wooldridge M. An Introduction to MultiAgent Systems[M]. 2nd ed. Chichester: John Wiley & Sons, 2009: 23-45.
[8] Macal C M, North M J. Tutorial on agent-based modeling and simulation[J]. Journal of Simulation, 2010, 4(3): 151-162.
[9] 王英博,李萌。多智能体仿真在城市交通流优化中的应用 [J]. 系统仿真学报,2020, 32 (7): 1321-1328.
[10] Grimm V, Berger U, DeAngelis D L, et al. A standard protocol for describing individual-based and agent-based models[J]. Ecological Modelling, 2006, 198(1-2): 115-126.
[11] 李娜,刘闯。基于 NetLogo 的新冠疫情传播仿真与防控策略分析 [J]. 系统仿真学报,2022, 34 (5): 1023-1031.
[12] 赵亮,王健。基于离散事件仿真的汽车零部件生产线优化 [J]. 工业工程与管理,2021, 26 (2): 123-129.
[13] 陈铭,张宁。多智能体仿真在城市主干道拥堵治理中的应用 [J]. 交通运输工程学报,2023, 23 (1): 187-196.
[14] 刘军,马跃峰。离散事件 - 多智能体混合仿真架构及其在物流系统中的应用 [J]. 系统仿真学报,2021, 33 (9): 2105-2114.
[15] Zhang Y, Li X, Wang Y. Hybrid simulation for smart logistics: Integrating discrete event and agent-based modeling[J]. IEEE Transactions on Industrial Informatics, 2022, 18(8): 5764-5773.

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 27
27 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)