重构视频孪生底座,掌控空间智能:融合视频坐标反演与行为建模的镜像体系
视频孪生技术正从二维展示向三维智能演进。镜像视界提出融合"视频坐标反演"和"行为空间建模"两大核心能力的新型视频孪生体系,通过五层架构实现从图像采集到空间控制的全链路闭环。关键技术包括厘米级无感定位的三角测量、基于轨迹的行为语义识别、三维孪生体构建等,已在工业制造、港口调度等场景取得显著成效。相比传统系统,该方案在精度、行为理解、多目标处理等方面具有明显优势
一、引言:重塑视频孪生的基础能力
视频孪生作为物理空间向数字空间映射的重要手段,其能力边界正快速演进。过去,视频孪生聚焦于二维图像展示,提供视觉复刻服务,却缺乏对空间、行为、目标的计算理解。 其结果是:
其结果是:
-
看得见,但无法“知道在哪”;
-
识别得了目标,却“理解不了动作”;
-
回放了事件,却“预测不了风险”。
在工业智能化、港口无人化、城市应急响应和战术空间感知等核心领域,传统视频孪生难以胜任任务型场景所需的精确定位、行为识别、指令联动与控制反馈。
镜像视界提出:“要让视频孪生掌控空间智能,必须重构其底座”。这一“底座”不是摄像头硬件本身,而是以下两个能力的融合:
① 视频坐标反演能力:从像素生成空间坐标
② 行为空间建模能力:从轨迹理解语义动作
 基于此,我们构建了镜像空间视频孪生体系,实现从二维视频系统向三维感知、行为智能、场景决策的跃迁。
基于此,我们构建了镜像空间视频孪生体系,实现从二维视频系统向三维感知、行为智能、场景决策的跃迁。
二、系统架构:坐标+行为的融合式视频孪生体系
镜像视界提出的镜像空间体系由五个层级构成,形成从图像采集到空间控制的全链路闭环:
✅ 1. 感知层
-
多视角相机矩阵布设(支持RGB、IR、广角、全景)
-
时间同步与图像预处理模块(时序插帧、色彩矫正、去畸变)
✅ 2. 坐标解算层
-
摄像头内外参标定
-
像素点匹配与多视角视差分析
-
基于三角测量的视频像素坐标反演为三维坐标点
✅ 3. 行为建模层
-
多帧轨迹融合与动作模式学习
-
空间行为标签生成(驻留、越界、聚集、协作等)
-
时空关系图构建与异常检测
✅ 4. 孪生映射层
-
构建三维孪生实体(人员/设备/集装箱/车辆)
-
动作与状态同步投影至孪生空间中
-
实时可视化与视频叠加三维轨迹展示

✅ 5. 联动控制层
-
行为驱动策略匹配
-
指令下发控制设备(AGV、机器人、指示灯)
-
联动报警、调度、反馈等系统进行事件响应
三、关键技术模块详解
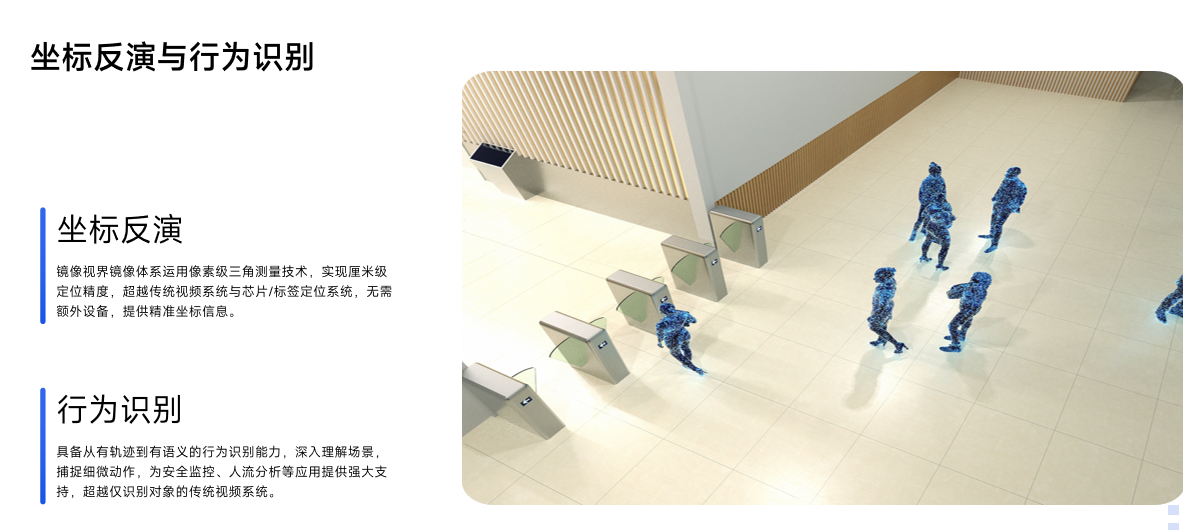
3.1 像素坐标反演技术:三角测量核心
本系统将像素点的空间意义从“图像位置”提升为“空间位置”:
-
多摄像头空间标定:建立全域几何视角关系
-
像素点多帧匹配:结合深度学习与光流匹配技术精确对点
-
空间三角测量:利用像素间视差与摄像机几何反演出三维坐标
-
误差优化:引入误差最小化框架与时间滤波器,提升稳定性与连续性
该技术无需目标佩戴传感器,即可完成厘米级动态坐标恢复,真正实现“无感定位 × 真三维”。
3.2 行为空间建模技术:轨迹即语义的认知逻辑
将三维坐标流进一步结构化,是空间理解的关键一跳。镜像视界在此环节融合以下能力:
-
轨迹提取与建模:构建空间连续路径
-
语义识别与标签生成:结合速度/角度/驻留时间识别动作含义
-
时空行为图谱:构建目标间空间关系网,解析协作、冲突、异常
-
事件驱动预测:基于行为模型预测未来动作(如逃跑、摔倒、闯入)
该模块赋予视频孪生系统从画面识别升级为行为理解的能力,使其具备推理能力。
3.3 三维孪生体构建:实体化目标 × 虚实同步
借助三维重建技术,镜像体系将每个目标构建为“孪生体”,包含以下维度:
-
空间位置(X, Y, Z)
-
实体姿态(骨架/外形/速度)
-
运动轨迹(过去 + 当前 + 预测)
-
行为状态(正常/异常/任务中/待命)
孪生体作为孪生空间的最小智能单元,可联动控制系统、任务管理系统与仿真系统形成闭环。
3.4 平台联动与控制接口
系统提供多种对接能力:
-
三维坐标/轨迹API
-
行为事件推送接口(MQTT/WebSocket)
-
控制反馈接口(指令回写、策略执行)
-
与GIS/CIM/SCADA/BIM等系统融合的适配层
平台联动场景包括:港口智能调度、工业现场安防联动、演训场战术评分系统、城市应急协同平台等。
四、典型场景落地案例
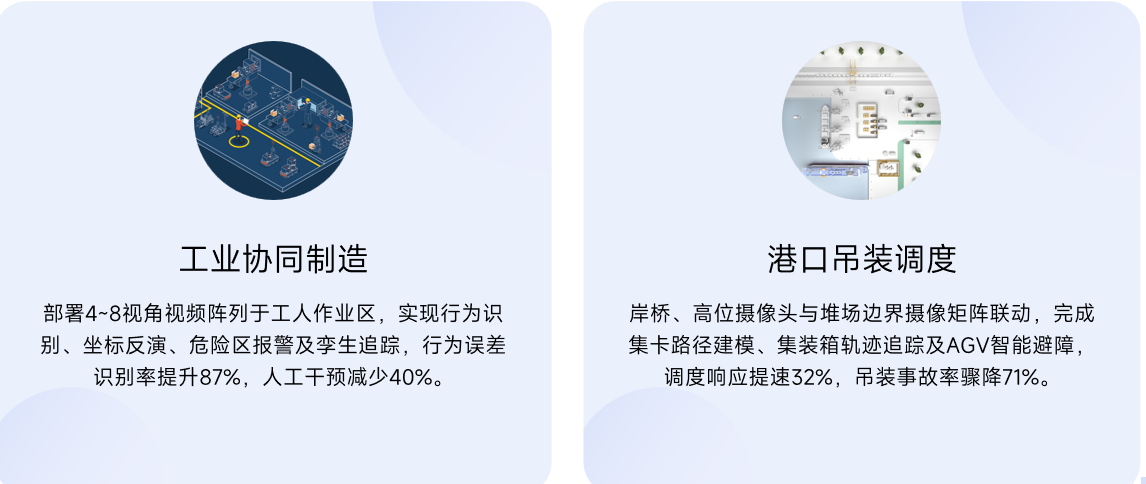
📍 工业协同制造
-
部署:工人作业区域部署4~8视角视频阵列
-
功能:人员行为识别 + 坐标反演 + 进入危险区报警 + 孪生可视化追踪
-
成效:行为误差识别率提高87%,人工干预下降40%
📍 港口吊装调度
-
部署:岸桥、高位摄像头、堆场边界布设摄像矩阵
-
功能:集卡路径建模 + 集装箱轨迹追踪 + AGV避障路径智能计算
-
成效:调度响应时间缩短32%,吊装事故率下降71%
📍 战术实战训练
-
部署:演训场四角、兵力汇聚点设立摄像阵列,构建三维演训空间
-
功能:单兵位置跟踪 + 战术行为重建 + 战术演练评分与可视复盘
-
成效:训练数据量提升200%,评估效率提升6倍
五、技术优势总结
| 维度 | 镜像视界镜像体系 | 传统视频系统 | 芯片/标签定位系统 |
|---|---|---|---|
| 坐标反演能力 | 像素级三角测量,厘米级精度 | 无 | 有,需佩戴设备 |
| 行为识别能力 | 有轨迹 → 有语义 | 弱,仅能识别对象 | 无 |
| 多目标能力 | 支持大规模空间对象同时建模 | 支持,无法定位轨迹 | 受限于标签数量与干扰 |
| 跨平台联动能力 | 全接口输出,行为驱动策略反馈 | 仅能图像转发 | 需专用设备与接收系统 |
| 成本与维护 | 中,软算为主,维护低 | 低 | 高,设备易老化 |
| 扩展性 | 支持任意系统、任意平台部署 | 封闭,难扩展 | 成本与兼容性问题大 |
六、未来演进路径
-
✅ 空间认知大模型集成:引入多模态感知融合,构建跨场景适配行为识别体系
-
✅ 孪生智能体自治决策:基于空间模型驱动设备联动与任务执行逻辑
-
✅ 从个体智能到群体协同:构建目标间协作、避让、分工等逻辑感知能力
-
✅ 多层孪生融合:实现设备孪生 + 行为孪生 + 组织孪生的多维叠加管理体系
七、结语:构建掌控现实的“视频引擎”
如果说视频孪生1.0是**“复刻现实”,
那么镜像视界的视频孪生2.0体系是“控制现实”**。
我们将每一帧像素转化为空间坐标,
将每一段轨迹识别为行为意图,
将每一个目标映射为智能孪生体,
最终构建一个能够看得见、测得准、算得出、控得住的空间智能平台。
镜像视界正以“像素反演 × 行为建模”为支点,重构视频孪生的底座,
推动未来工业、港口、战术与城市的空间感知能力跨入新的智能维度。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 25
25 0
0- 0



 已为社区贡献55条内容
已为社区贡献55条内容

所有评论(0)