跨场景空间坐标重建方案:基于三角测量与动态重建的视频孪生路径
镜像视界公司推出"跨场景空间坐标重建"技术体系,通过多视角三角测量、动态目标重建等技术将二维视频反演为三维坐标,解决传统视频孪生系统缺乏空间认知能力的痛点。该系统由感知采集、图像处理、三角测量等五大模块组成,支持工业制造、战术训练等多场景应用,具备实时动态建模、统一坐标输出等优势。技术亮点包括多基线优化算法、视频矩阵融合、动态轨迹拟合等,相比传统方案具有环境适应性强、部署成本低
 镜像视界(浙江)科技有限公司 · 2025年8月发布
镜像视界(浙江)科技有限公司 · 2025年8月发布
一、引言:空间坐标是视频孪生的计算起点
视频孪生作为现实世界数字化重建的重要手段,已广泛应用于城市管理、工业制造、战术训练与应急响应等领域。然而,传统视频孪生系统仍以“图像展示”为核心,无法有效反演空间坐标,限制了其决策辅助、智能分析与动态控制的能力。
当前行业痛点集中体现在三点:
-
视频系统缺乏空间认知能力,仅能“看见”,不能“算清”;
-
不同场景中部署条件不一,难以跨场景泛化部署;
-
缺乏通用的坐标计算引擎,定位结果离散、不连续、不统一。

镜像视界(浙江)科技有限公司提出**“跨场景空间坐标重建”技术体系,融合多视角三角测量、动态目标重建、时序同步机制与视频矩阵融合技术**,将二维像素反演为三维坐标,实现真实空间的统一理解与动态控制,为“可控型视频孪生系统”提供底座支撑。
二、系统架构:从图像融合到三维坐标重建的闭环体系
该方案以“像素即坐标”为理念,建立从视频输入到空间数据输出的全链条系统。系统架构由五个核心模块构成:
-
感知采集模块:部署多路矩阵式相机,构建360°覆盖的视频感知网络;
-
图像处理模块:进行标定、畸变矫正、图像对齐与同步;
-
三角测量模块:基于双/多目相机视差,反演目标三维空间坐标;
-
动态重建模块:对移动目标进行姿态建模、轨迹跟踪与动态体建构;
-
统一坐标输出模块:将三维坐标统一映射至空间GIS/建模平台,实现与其他业务系统集成。
 该架构可适配不同尺度、不同环境、不同目标的空间重建需求,具备高度泛化能力。
该架构可适配不同尺度、不同环境、不同目标的空间重建需求,具备高度泛化能力。
三、核心技术详解
3.1 多视角三角测量:二维到三维的反演基础
三角测量原理基于以下核心:同一目标在不同视角下的像素投影差异(视差)反映了其空间深度信息。镜像视界基于自研的“多基线优化算法”,有效提升了测量精度与鲁棒性。
关键步骤包括:
-
多相机联合标定,提取相对位置与内参;
-
图像极线校正,实现像素对的高精匹配;
-
三角函数反演目标三维坐标点;
-
误差加权融合形成统一点云模型。
区别于传统静态测量,镜像视界支持目标移动情况下的实时三角化解算,保障动态坐标连续、稳定。
3.2 视频矩阵融合:构建全景空间视野
在工业或战术场景中,传统双目或单目系统存在视野死角与深度盲区。镜像视界提出矩阵式视频融合技术,以多相机阵列构建完整感知矩阵,通过统一时间轴与空间坐标系对齐,实现全域视频场景拼接。
技术亮点包括:
-
同步多通道输入源并建立帧级统一时钟;
-
支持光学视角差异自动配准;
-
适配复杂地形结构(如设备遮挡、异形空间);
-
实现“无缝拼接”的空间连续性建模。
这为三角测量提供完整、无盲区的视角支持,大幅提升重建范围与精度。
3.3 动态目标重建与轨迹拟合
为实现空间场景中“人”“车”“设备”等多类型目标的动态复现,系统引入了三维动态重建模块,支持:
-
目标三维轮廓重建(基于点云体积合并);
-
三维姿态建模(适用于人体、机械臂、车辆);
-
行为轨迹提取与运动趋势拟合;
-
长时间稳定建模与轨迹数据库构建。
例如,在一个战术训练场中,系统可对每位士兵的动态姿态进行还原、分析其行进轨迹与动作执行准确率,并形成完整复盘数据。
3.4 时序同步与空间坐标统一机制
跨摄像头系统的三角测量对时间同步要求极高。镜像视界通过以下机制保障解算精度:
-
引入硬件级同步(如GPS时钟/脉冲触发);
-
软件级补偿插帧/时间对齐算法;
-
对所有解算结果建立全局坐标基准;
-
输出统一空间地图接口(支持与CIM/GIS平台对接)。

最终实现不同时间、不同设备、不同目标的坐标统一表达,具备空间级一致性。
四、典型场景适配能力
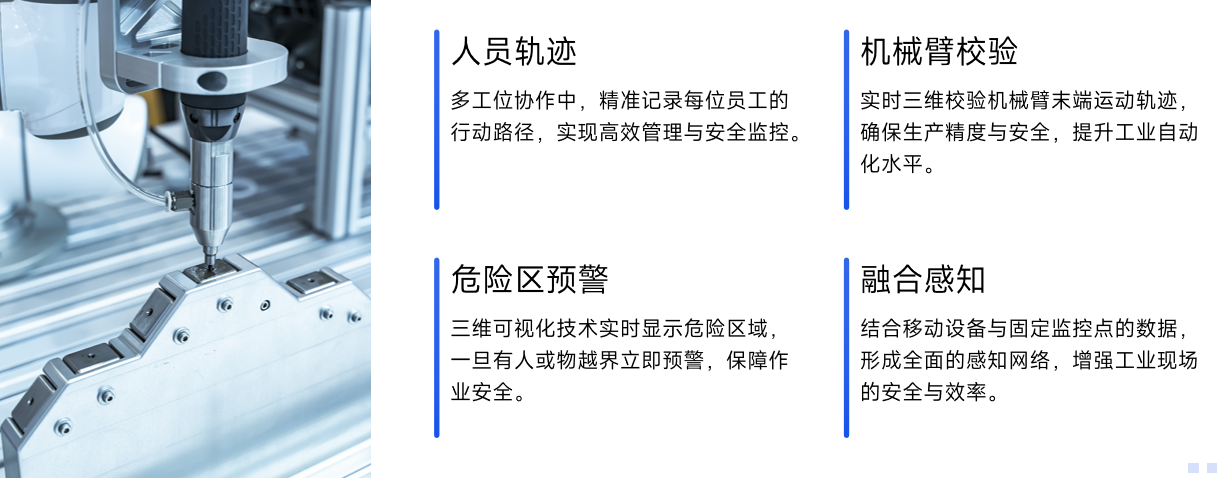
✅ 工业制造场景
-
多工位协作的人员轨迹还原;
-
机械臂末端路径实时三维校验;
-
三维危险区可视化与越界预警;
-
移动设备与固定监控点的融合感知;
✅ 港区作业场景
-
远程吊装作业轨迹建模;
-
自动引导车辆的路径偏差评估;
-
货物从卸船到堆放全过程可视复现;
-
作业流程异常识别与调度系统联动;

✅ 战术训练与仿真演练
-
单兵实时三维动作采集与回放;
-
枪姿、奔跑姿态、协同战术路径自动建模;
-
多目标三维位置关系实时可视化;
-
三维战场复盘推演与战术评分辅助系统;

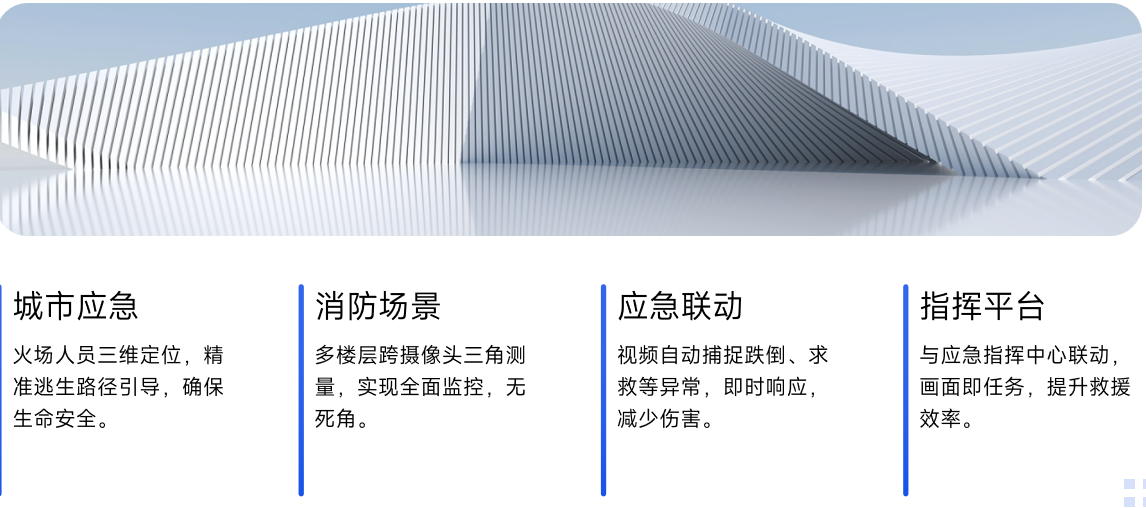
✅ 城市应急与消防场景
-
火场人员三维定位与逃生路径引导;
-
多楼层跨摄像头三角测量部署;
-
视频中自动捕捉跌倒、求救等异常行为;
-
与应急指挥中心平台联动,实现画面即任务;
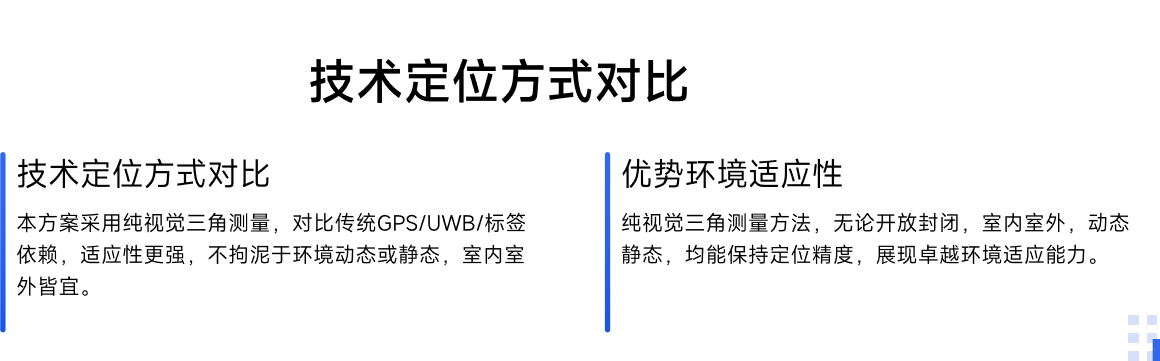
五、技术优势与创新特征
| 技术维度 | 本方案能力 | 传统方案不足之处 |
|---|---|---|
| 定位方式 | 纯视觉三角测量 | 依赖GPS/UWB/标签,局限多 |
| 空间适配能力 | 可适配室内/室外、开放/封闭、动态/静态等多种环境 | 多需依赖特定部署结构 |
| 坐标输出能力 | 实时、统一、动态更新 | 离散、延迟、格式不一 |
| 重建对象类型 | 动静结合:人、车、物、流程均支持 | 静态优先,动态能力差 |
| 系统扩展能力 | 可接入CIM/BIM/SCADA等平台,支持二次开发 | 多为封闭式或依赖硬件平台 |
| 布设/运维成本 | 低部署门槛(仅需相机+算力),免标签、免芯片 | 部署成本高、设备易老化、维护难 |
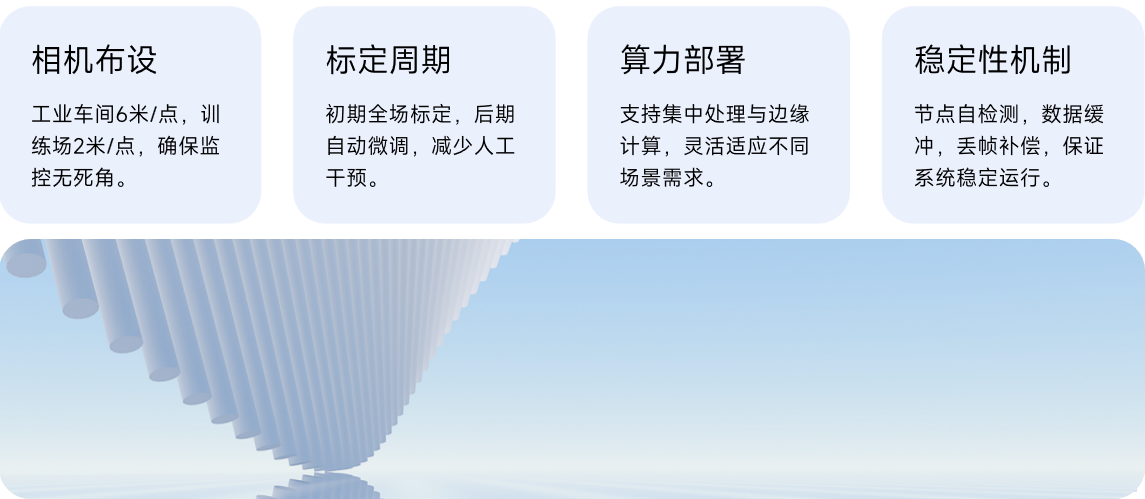
六、系统部署策略与工程建议
-
相机布设密度建议:工业车间推荐6米/点,训练场建议2米/点;
-
标定周期建议:初期部署需全场标定,后期支持自动微调;
-
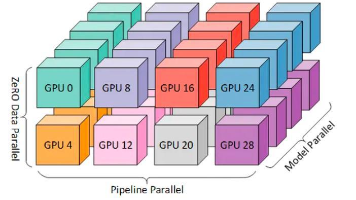
算力部署方式:支持集中处理(服务器)与边缘融合处理(Jetson Orin);
-
融合平台对接:建议输出统一三维坐标API,可对接城市数据平台、视频分析系统、应急指挥大脑等系统;
-
稳定性保障机制:引入节点自检测、数据缓冲、丢帧补偿等机制,确保全天候系统可用性;
七、未来展望:从坐标重建走向主动空间智能
镜像视界的空间坐标重建方案,不仅解决了“视频看得见但不知在哪”的技术痛点,更为视频孪生系统构建了可用于时空预测、行为驱动与系统联动的基础能力。
未来方向将包括:
-
多模态传感融合:引入IMU、激光雷达、热成像等异源传感器,提升复杂场景感知精度;
-
AI行为认知增强:引入深度学习模型进行轨迹预测、行为识别与事件关联判断;
-
无人系统控制接口开放:为无人机、AGV、无人车等平台提供三维导航与动态避障数据源;
-
城市级平台融合:成为智慧城市三维可视化、应急响应系统的空间坐标数据核心源头。
结语:重构视频空间逻辑,实现全场景三维感知统一
空间坐标,是一切“空间智能”的起点;三角测量,是一切“像素解算”的核心。镜像视界以可泛化部署、可动态更新、可实时控制的三维空间解算体系,打通了视频感知与空间理解之间的壁垒,真正实现了跨场景视频孪生系统的闭环能力。
从港口到工厂,从演训场到火灾现场,从像素到坐标,从轨迹到策略,镜像视界让每一帧视频不再只是图像,而是掌控现实的空间钥匙。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 14
14 0
0- 0



 已为社区贡献55条内容
已为社区贡献55条内容

所有评论(0)