视频孪生的战术升级:像素成坐标,实时掌控空间
摘要:视频孪生技术正从场景复刻向战术控制升级。镜像视界公司提出"像素即坐标"三维视觉定位系统,通过视觉定位引擎、三角测量、轨迹建模实现实时空间感知。核心技术突破包括:厘米级坐标定位、战术行为建模识别、空间触发联动控制。该系统可应用于战术演训、工业安防、港口调度等场景,从被动展示转变为主动响应平台,实现从"看图"到"控场"的跃迁。未来将向A
一、引言:从复刻战场到操控战术,视频孪生必须“进化”
视频孪生技术最初用于场景复刻与图像监控,它帮助我们“看清现实”,却未能“掌控现实”。在工业调度、港口物流、应急指挥乃至战术演训等核心场景中,仅有可视化远远不够——
指挥者需要的不是录像,而是实时坐标;
安全系统需要的不是图像,而是轨迹控制;
战术体系需要的不是回看,而是空间推演。
面对这些需求,镜像视界(浙江)科技有限公司提出全新路径:
构建以“像素即坐标”为核心的三维视觉定位系统,实现从图像复刻到空间掌控的战术跃迁。
二、战术级视频孪生平台架构概览
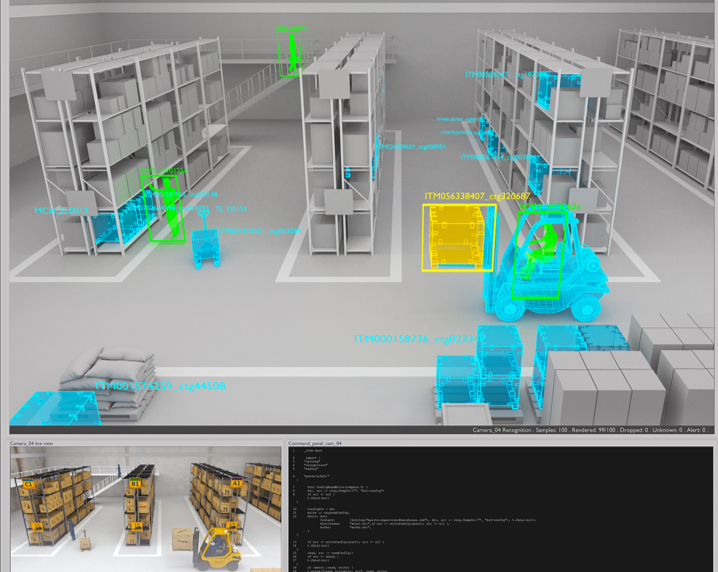
平台融合“视觉定位引擎 + 三角测量系统 + 轨迹建模器 + 控制反馈中枢”,实现一套从摄像头画面 → 坐标输出 → 轨迹建模 → 控制反馈的闭环战术感知系统。
| 模块 | 功能 |
|---|---|
| 📷 多视角矩阵采集系统 | 布设高重叠率相机矩阵,全面覆盖战术区域 |
| 📐 相机标定与三角测量 | 构建空间投影几何体系,实现像素→坐标反演 |
| 🌐 实时三维重建模块 | 动态目标空间轨迹建模、姿态识别、趋势分析 |
| ⚙ 控制触发与联动引擎 | 越界、集结、异常行为触发控制机制 |
| 🧠 孪生反馈与战术可视系统 | 实时驱动沙盘、战术图、预警屏与联动系统 |
📌 可集成至现有视频系统中,无需高改造成本。
三、核心技术突破亮点
✅ 1. 像素即坐标:每一帧画面具备三维语义
通过稠密立体匹配与三角测量,平台支持:
-
实时获取 X/Y/Z 空间坐标;
-
误差控制在厘米级;
-
适用于移动人员、载具、机械目标的全域空间感知。
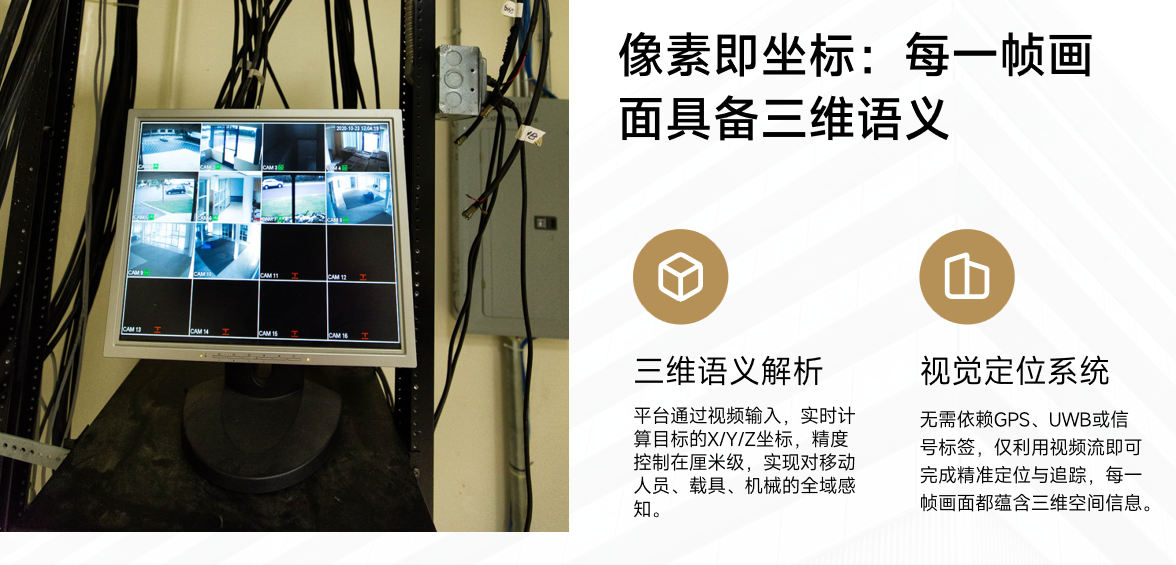
📌 无需GPS、UWB或任何信号标签,仅靠视频即可解算。
✅ 2. 战术行为建模:轨迹线就是作战语言
平台内置行为建模系统,支持以下战术级语义识别:
-
越界、绕行、潜伏、冲刺;
-
掩体切换、协同行动、徘徊等待;
-
非常规集结、高速穿插等行为预警。
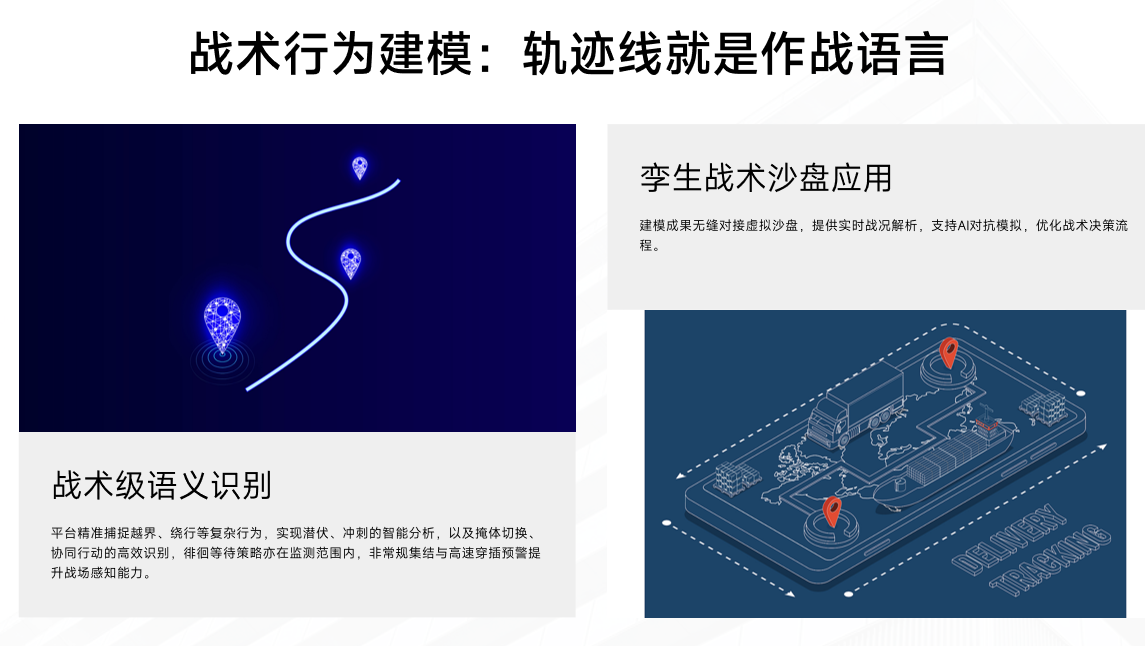
建模结果自动反馈至孪生战术沙盘,支持实时战况分析与AI对抗推演。
✅ 3. 联动反馈机制:空间即接口,坐标即命令
系统支持空间触发控制逻辑,例如:
-
【目标进入红区】→ 联动灯光、广播、封锁命令;
-
【集结过密 + 静止超过阈值】→ 联动发起警戒巡逻;
-
【单兵轨迹异常 + 设备接近】→ 联动机器人干预。

📌 从“视频展示系统”升级为“主动响应平台”。
四、典型场景部署
🪖 战术演训沙盘
-
多兵种轨迹捕捉;
-
越界动作、倒地行为建模;
-
构建全息三维演训地图与数字回放系统。
🏭 工业防御与园区安控
-
员工工作轨迹与岗位越界识别;
-
无人车/叉车路径冲突预测;
-
三维警戒线、动态风险区域自动调整。
⚓ 港区智慧防控
-
作业设备路径重构;
-
操作人员异常行为识别;
-
“可控制的港口孪生图”与调度联动系统。
🚨 应急响应与反恐安防
-
集会人群三维轨迹热力分析;
-
冲突路径交叉预判;
-
脱逃/可疑徘徊轨迹智能追踪与封锁响应。
五、从传统孪生到战术孪生的跃迁对比
| 维度 | 传统视频孪生 | 镜像视界战术孪生 |
|---|---|---|
| 坐标能力 | 无三维坐标体系 | 实时像素坐标反演 |
| 行为感知 | 弱/无行为识别 | 趋势预测 + 行为分类 |
| 联动控制 | 被动展示 | 越界/异常/趋势触发系统操作 |
| 决策支持 | 靠人工回看 | 实时触发/AI辅助决策 |
| 部署方式 | 重度建模 | 摄像头+算法即可部署 |

🎯 本质变化:从“看图”到“控场”。
六、未来演进方向
-
AI战术规划联动
结合空间行为建模与目标路径预测,形成“视觉+决策+部署”的自适应作战辅助系统。 -
空地一体坐标网络
将无人机拍摄图像引入坐标系统,实现空地统一、上下联动。 -
边缘化模块部署
轻量版本可部署于单兵终端、哨点设备或应急箱,实现战时/灾时独立运行。
七、结语:从可视,到可控,到可胜
视频本不等于智能,但坐标可以赋予视频“空间智商”。
镜像视界打造的视频孪生战术平台,不再只是复刻场景,而是直接参与战术任务执行。
我们用三维视觉定位技术:
-
把图像变成坐标;
-
把轨迹转为语言;
-
把空间变为控制台。

像素成坐标,画面即战力。
视频孪生,正从复刻走向掌控,走向实战。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 8
8 0
0- 0



 已为社区贡献55条内容
已为社区贡献55条内容

所有评论(0)