卡尔曼滤波与目标跟踪算法实现
确定状态:先进行级联匹配,对于指定帧数内,按照丢失次数多少排优先级,按优先级和对应的Detection进行匹配,未匹配上的进入iou匹配,对于丢失的物体,连续丢失超过阈值才进行舍弃。当检测到一个物体,对其直接进行iou匹配,如果没有对应的detection,初始化一个新的Track。–中心坐标(cx, cy), 高宽比r, 高h, 以及各自的速度变化值。根据上一时刻(t - 1)的状态估计值来预测
卡尔曼滤波与目标跟踪算法实现
代码实现: https://github.com/lovodllt/kalman_track
(这里用的是ros的工作空间,需要使用的记得修改cmakelist)
对于短暂被遮挡物体的识别效果

卡尔曼滤波(KF)
在线性条件下,通过过程与观测两个方面,对输入值进行最优估计
原理

(方差模拟不确定性)
公式部分:

观测(observation)
z t = H x t + v k \Large z_t=Hx_t+v_k zt=Hxt+vk
各参数含义:
z t : 当前时刻 ( t ) 的观测值 H : 观测矩阵 H x t : 当前时刻 ( t ) 的真实状态向量 v k : 观测噪声 \large \begin{align*} &z_t:当前时刻(t)的观测值\\ &H : 观测矩阵H\\ &x_t:当前时刻(t)的真实状态向量\\ &v_k:观测噪声 \end{align*} zt:当前时刻(t)的观测值H:观测矩阵Hxt:当前时刻(t)的真实状态向量vk:观测噪声
预测(Prediction)
状态预测公式
x ^ t − = F x ^ t − 1 + B u t − 1 \Large \hat{x}_t^{-}=F\hat{x}_{t - 1}+Bu_{t - 1} x^t−=Fx^t−1+But−1
根据上一时刻(t - 1)的状态估计值来预测当前时刻( t )的状态
推导:

各参数含义:
x ^ t − : 当前时刻 ( t ) 的先验姿态估计 ( 预测值 ) F : 状态转移矩阵 F x ^ t − 1 : 上一时刻 ( t − 1 ) 的后验状态估计 ( 最优估计值 ) B : 控制矩阵 B u t − 1 : 上一时刻( t − 1 )的控制输入 \large \begin{align*} &\hat{x}_t^-:当前时刻(t)的先验姿态估计(预测值)\\ &F:状态转移矩阵 F\\ &\hat{x}_{t-1}:上一时刻(t-1)的后验状态估计(最优估计值)\\ &B:控制矩阵 B\\ &u_{t-1}:上一时刻(t - 1)的控制输入 \end{align*} x^t−:当前时刻(t)的先验姿态估计(预测值)F:状态转移矩阵Fx^t−1:上一时刻(t−1)的后验状态估计(最优估计值)B:控制矩阵But−1:上一时刻(t−1)的控制输入
协方差预测公式
P t − = F P t − 1 F T + Q \Large P_t^−=FP_{t−1} F^T+Q Pt−=FPt−1FT+Q
衡量变量的总体误差
推导:

根据上一时刻(t - 1)的状态协方差矩阵来预测当前时刻的状态协方差
各参数含义:
P t − : 当前时刻 ( t ) 的先验估计协方差矩阵 ( 预测值 ) F : 状态转移矩阵 P t − 1 : 上一时刻 ( t − 1 ) 的后验估计协方差矩阵 ( 最优估计值 ) F T : 状态转移矩阵 F 的转置 Q : 过程噪声协方差矩阵 \large \begin{align*} &P_t^-:当前时刻(t)的先验估计协方差矩阵(预测值)\\ &F:状态转移矩阵\\ &P_{t-1}:上一时刻(t-1)的后验估计协方差矩阵(最优估计值)\\ &F^T : 状态转移矩阵 F 的转置\\ &Q:过程噪声协方差矩阵 \end{align*} Pt−:当前时刻(t)的先验估计协方差矩阵(预测值)F:状态转移矩阵Pt−1:上一时刻(t−1)的后验估计协方差矩阵(最优估计值)FT:状态转移矩阵F的转置Q:过程噪声协方差矩阵
更新(Update)
卡尔曼增益公式
K t = P t − H T ( H P t − H T + R ) − 1 \Large K_t=P_t^−H^T(HP_t^−H^T+R)^{−1} Kt=Pt−HT(HPt−HT+R)−1
用于确定在更新状态估计时,测量值所占的比重。
各参数含义:
K t : 当前时刻 ( t ) 的卡尔曼增益 ( 估计值权重 ) P t − : 当前时刻 ( t ) 的先验状态协方差 ( 预测值 ) H : 观测矩阵 H R : 测量噪声协方差矩阵 R \large \begin{align*} &K_t: 当前时刻(t)的卡尔曼增益(估计值权重)\\ &P_t^−: 当前时刻(t)的先验状态协方差(预测值)\\ &H : 观测矩阵H\\ &R : 测量噪声协方差矩阵R \end{align*} Kt:当前时刻(t)的卡尔曼增益(估计值权重)Pt−:当前时刻(t)的先验状态协方差(预测值)H:观测矩阵HR:测量噪声协方差矩阵R
状态更新公式
x ^ t = x ^ t − + K t ( z t − H x ^ t − ) \Large \hat{x}_t= \hat{x}_t^−+K_t(z_t−H \hat{x}_t^−) x^t=x^t−+Kt(zt−Hx^t−)
结合预测状态和当前时刻的测量值来得到当前时刻的最优状态估计
各参数含义:
x ^ t : 当前时刻 ( t ) 的后验状态估计 ( 最优估计值 ) x ^ t − : 当前时刻 ( t ) 的先验状态估计 ( 预测值 ) K t : 当前时刻 ( t ) 的卡尔曼增益 z t : 当前时刻 ( t ) 的测量值 H : 观测矩阵 H \large \begin{align*} &\hat{x}_t: 当前时刻(t)的后验状态估计(最优估计值)\\ &\hat{x}_t^-: 当前时刻(t)的先验状态估计(预测值)\\ &K_t: 当前时刻(t)的卡尔曼增益\\ &z_t: 当前时刻(t)的测量值\\ &H: 观测矩阵H\\ \end{align*} x^t:当前时刻(t)的后验状态估计(最优估计值)x^t−:当前时刻(t)的先验状态估计(预测值)Kt:当前时刻(t)的卡尔曼增益zt:当前时刻(t)的测量值H:观测矩阵H
协方差更新公式
P t = ( I − K t H ) P t − \Large P_t=(I−K_tH)P_t^− Pt=(I−KtH)Pt−
根据卡尔曼增益和先验状态协方差来更新当前时刻的状态协方差
各参数含义:
P t : 当前时刻 ( t ) 的后验状态协方差 ( 最优值 ) I : 单位矩阵 K t : 当前时刻 ( t ) 的卡尔曼增益 ( 估计值权重 ) H : 观测矩阵 P t − : 当前时刻 ( t ) 的先验状态协方差 ( 预测值 ) \large \begin{align*} &P_t:当前时刻(t)的后验状态协方差(最优值)\\ &I:单位矩阵\\ &K_t: 当前时刻(t)的卡尔曼增益(估计值权重)\\ &H: 观测矩阵\\ &P_t^-:当前时刻(t)的先验状态协方差(预测值) \end{align*} Pt:当前时刻(t)的后验状态协方差(最优值)I:单位矩阵Kt:当前时刻(t)的卡尔曼增益(估计值权重)H:观测矩阵Pt−:当前时刻(t)的先验状态协方差(预测值)
实例
需要考虑的状态:
均值:x = [cx, cy, r, h, vx, vy, vr, vh]
–中心坐标(cx, cy), 高宽比r, 高h, 以及各自的速度变化值
协方差矩阵:由需要控制变量的数量决定,此处为8*8的矩阵

代码实现
class KalmanFilter_ {
/* x = [x,
* y,
* w,
* h,
* vx,
* vy,
* vw,
* vh]
*/
private:
Vector8f x;//状态向量
Matrix8f F;//状态转移矩阵
Matrix8f P;//误差协方差矩阵
Matrix8f Q;//过程噪声协方差矩阵
Eigen::Matrix4f R;//观测噪声协方差矩阵
Eigen::Matrix<float,8,4> K;//卡尔曼增益
Eigen::Matrix<float,4,8> H;//观测矩阵
float dt;
bool is_init = false;
public:
KalmanFilter_() : dt(0.01)
{
//初始化状态向量
x << 0, 0, 0, 0, 0, 0, 0, 0;
//初始化状态转移矩阵
F = Matrix8f::Identity();
//初始化过程噪声协方差矩阵
Q = Matrix8f::Zero(8,8);
Q.diagonal() << 1e-2, 1e-2, 1e-2, 2e-2, 5e-2, 5e-2, 1e-4, 4e-2;
//初始化观测噪声协方差矩阵
R = Eigen::Matrix4f::Identity() * (1e-2);
//初始化误差协方差
P = Matrix8f::Identity() * 10;
//初始化观测矩阵
H << 1, 0, 0, 0, 0, 0, 0, 0,
0, 1, 0, 0, 0, 0, 0, 0,
0, 0, 1, 0, 0, 0, 0, 0,
0, 0, 0, 1, 0, 0, 0, 0;
}
void setF(float dt)
{
F << 1, 0, 0, 0, dt, 0, 0, 0,
0, 1, 0, 0, 0, dt, 0, 0,
0, 0, 1, 0, 0, 0, dt, 0,
0, 0, 0, 1, 0, 0, 0, dt,
0, 0, 0, 0, 1, 0, 0, 0,
0, 0, 0, 0, 0, 1, 0, 0,
0, 0, 0, 0, 0, 0, 1, 0,
0, 0, 0, 0, 0, 0, 0, 1;
Vector8f new_x = x;
x[0] = new_x[0] + new_x[4] * dt;
x[1] = new_x[1] + new_x[5] * dt;
x[2] = new_x[2] + new_x[6] * dt;
x[3] = new_x[3] + new_x[7] * dt;
}
void init(const Eigen::Vector4f& z)
{
x.head<4>() = z;
is_init = true;
}
// 预测
void predict(float dt)
{
if(!is_init) return;
setF(dt);
x = F * x;
P = F * P * F.transpose() + Q;
}
// 更新
void update(const Eigen::Vector4f& z)
{
if(!is_init) init(z);
auto y = z - H * x;
auto S = H * P * H.transpose() + R;
K = P * H.transpose() * S.inverse();
x = x + K * y;
P = (Matrix8f::Identity() - K * H) * P;
}
// 获取当前位置
Eigen::Vector4f getPosition()
{
return x.head<4>();
}
};typedef Eigen::Matrix<float, 8, 1> Vector8f;
typedef Eigen::Matrix<float, 8, 8> Matrix8f;
class KalmanFilter_ {
/* x = [x,
* y,
* w,
* h,
* vx,
* vy,
* vw,
* vh]
*/
private:
Vector8f x;//状态向量
Matrix8f F;//状态转移矩阵
Matrix8f P;//误差协方差矩阵
Matrix8f Q;//过程噪声协方差矩阵
Eigen::Matrix4f R;//观测噪声协方差矩阵
Eigen::Matrix<float,8,4> K;//卡尔曼增益
Eigen::Matrix<float,4,8> H;//观测矩阵
float dt;
bool is_init = false;
public:
KalmanFilter_() : dt(0.01)
{
//初始化状态向量
x << 0, 0, 0, 0, 0, 0, 0, 0;
//初始化状态转移矩阵
F = Matrix8f::Identity();
//初始化过程噪声协方差矩阵
Q = Matrix8f::Zero(8,8);
Q.diagonal() << 1.0, 1.0, 1.0, 1.0, 2.0, 2.0, 2.0, 2.0;
//初始化观测噪声协方差矩阵
R = Eigen::Matrix4f::Identity() * 0.01;
//初始化误差协方差
P = Matrix8f::Identity() * 10;
//初始化观测矩阵
H << 1, 0, 0, 0, 0, 0, 0, 0,
0, 1, 0, 0, 0, 0, 0, 0,
0, 0, 1, 0, 0, 0, 0, 0,
0, 0, 0, 1, 0, 0, 0, 0;
}
void setF(float dt)
{
F << 1, 0, 0, 0, dt, 0, 0, 0,
0, 1, 0, 0, 0, dt, 0, 0,
0, 0, 1, 0, 0, 0, dt, 0,
0, 0, 0, 1, 0, 0, 0, dt,
0, 0, 0, 0, 1, 0, 0, 0,
0, 0, 0, 0, 0, 1, 0, 0,
0, 0, 0, 0, 0, 0, 1, 0,
0, 0, 0, 0, 0, 0, 0, 1;
}
void init(const Eigen::Vector4f& z)
{
x.head<4>() = z;
is_init = true;
}
// 预测
void predict(float dt)
{
if(!is_init) return;
setF(dt);
x = F * x;
P = F * P * F.transpose() + Q;
}
// 更新
void update(const Eigen::Vector4f& z)
{
if(!is_init) init(z);
auto y = z - H * x;
auto S = H * P * H.transpose() + R;
K = P * H.transpose() * S.inverse();
x = x + K * y;
P = (Matrix8f::Identity() - K * H) * P;
}
// 获取当前位置
Eigen::Vector4f getPosition()
{
return x.head<4>();
}
};
扩展卡尔曼滤波(EKF)
可应用于非线性环境。相较于卡尔曼滤波,状态向量中可以引入加速度,旋转等非线性内容
通过对状态转移矩阵和观测矩阵进行求导降阶,实现对非线性函数进行线性化近拟
公式部分
观测(Observation)
z t = H ( x t ) + Q \Large z_t=H(x_t)+Q zt=H(xt)+Q
各参数含义:
z t : 当前时刻 ( t ) 的观测值 H ( − ) : 观测函数,非线性函数 x t : 当前时刻 ( t ) 的真实状态向量 Q : 观测噪声 \large \begin{align*} &z_t:当前时刻(t)的观测值\\ &H(-):观测函数,非线性函数\\ &x_t: 当前时刻(t)的真实状态向量\\ &Q: 观测噪声 \end{align*} zt:当前时刻(t)的观测值H(−):观测函数,非线性函数xt:当前时刻(t)的真实状态向量Q:观测噪声
预测(Prediction)
状态预测公式
x ^ t − = f ( x ^ t − 1 , u t ) \Large \hat{x}_t^-=f(\hat{x}_{t−1},u_t) x^t−=f(x^t−1,ut)
各参数含义:
x ^ t − : 当前时刻 ( t ) 的先验姿态估计 ( 预测值 ) f ( − ) : 非线性函数,描述了系统状态如何从 t − 1 时刻转移到 t 时刻 x ^ t : 上一时刻 ( t − 1 ) 的后验状态估计 ( 最优估计值 ) \large \begin{align*} &\hat{x}_t^-:当前时刻(t)的先验姿态估计(预测值)\\ &f(-):非线性函数,描述了系统状态如何从t-1时刻转移到t时刻\\ &\hat{x}_t:上一时刻(t-1)的后验状态估计(最优估计值) \end{align*} x^t−:当前时刻(t)的先验姿态估计(预测值)f(−):非线性函数,描述了系统状态如何从t−1时刻转移到t时刻x^t:上一时刻(t−1)的后验状态估计(最优估计值)
协方差预测公式
P t − = F t P t − 1 F t T + Q \Large P_t^-=F_tP_{t-1}F_t^T+Q Pt−=FtPt−1FtT+Q
各参数含义:
P t − : 当前时刻 ( t ) 的先验估计协方差矩阵 F t : 状态转移矩阵在 x ^ t − 处的雅可比矩阵 P t − 1 : 上一时刻 ( t − 1 ) 的后验估计协方差矩阵 Q : 过程噪声协方差矩阵 \large \begin{align*} &P_t^-:当前时刻(t)的先验估计协方差矩阵\\ &F_t:状态转移矩阵在\hat{x}_t^-处的雅可比矩阵\\ &P_{t-1}:上一时刻(t-1)的后验估计协方差矩阵\\ &Q:过程噪声协方差矩阵 \end{align*} Pt−:当前时刻(t)的先验估计协方差矩阵Ft:状态转移矩阵在x^t−处的雅可比矩阵Pt−1:上一时刻(t−1)的后验估计协方差矩阵Q:过程噪声协方差矩阵
更新(Update)
卡尔曼增益公式
K t = P t − H t T ( H t P t − H t T + R ) − 1 \Large K_t=P_t^−H_t^T(H_tP_t^−H_t^T+R)^{−1} Kt=Pt−HtT(HtPt−HtT+R)−1
各参数含义:
K t : 当前时刻 ( t ) 的卡尔曼增益 ( 估计值权重 ) P t − : 当前时刻 ( t ) 的先验状态协方差 ( 预测值 ) H t : 观测函数 H 在 x ^ t − 处的雅克比矩阵 R : 测量噪声协方差矩阵 R \large \begin{align*} &K_t: 当前时刻(t)的卡尔曼增益(估计值权重)\\ &P_t^−: 当前时刻(t)的先验状态协方差(预测值)\\ &H_t: 观测函数H在\hat{x}_{t}^{-}处的雅克比矩阵\\ &R : 测量噪声协方差矩阵R \end{align*} Kt:当前时刻(t)的卡尔曼增益(估计值权重)Pt−:当前时刻(t)的先验状态协方差(预测值)Ht:观测函数H在x^t−处的雅克比矩阵R:测量噪声协方差矩阵R
状态更新公式
x ^ t = x ^ t − + K t ( z t − H ( x ^ t − ) ) \Large \hat{x}_t= \hat{x}_t^−+K_t(z_t−H(\hat{x}_t^−)) x^t=x^t−+Kt(zt−H(x^t−))
各参数含义:
x ^ t : 当前时刻 ( t ) 的后验状态估计 ( 最优估计值 ) x ^ t − : 当前时刻 ( t ) 的先验状态估计 ( 预测值 ) K t : 当前时刻 ( t ) 的卡尔曼增益 z t : 当前时刻 ( t ) 的测量值 H : 观测矩阵 H ( x ) 在 t 时刻先验状态估计值 x ^ t − 处的计算结果 \large \begin{align*} &\hat{x}_t: 当前时刻(t)的后验状态估计(最优估计值)\\ &\hat{x}_t^-: 当前时刻(t)的先验状态估计(预测值)\\ &K_t: 当前时刻(t)的卡尔曼增益\\ &z_t: 当前时刻(t)的测量值\\ &H: 观测矩阵H(x)在t时刻先验状态估计值\hat{x}_t^-处的计算结果\\ \end{align*} x^t:当前时刻(t)的后验状态估计(最优估计值)x^t−:当前时刻(t)的先验状态估计(预测值)Kt:当前时刻(t)的卡尔曼增益zt:当前时刻(t)的测量值H:观测矩阵H(x)在t时刻先验状态估计值x^t−处的计算结果
协方差更新公式
P t = ( I − K t H t ) P t − \Large P_t=(I−K_tH_t)P_t^− Pt=(I−KtHt)Pt−
各参数含义:
P t : 当前时刻 ( t ) 的后验状态协方差 ( 最优值 ) I : 单位矩阵 K t : 当前时刻 ( t ) 的卡尔曼增益 ( 估计值权重 ) H t : 观测函数 H 在 x ^ t − 处的雅克比矩阵 P t − : 当前时刻 ( t ) 的先验状态协方差 ( 预测值 ) \large \begin{align*} &P_t:当前时刻(t)的后验状态协方差(最优值)\\ &I:单位矩阵\\ &K_t: 当前时刻(t)的卡尔曼增益(估计值权重)\\ &H_t: 观测函数H在\hat{x}_{t}^{-}处的雅克比矩阵\\ &P_t^-:当前时刻(t)的先验状态协方差(预测值) \end{align*} Pt:当前时刻(t)的后验状态协方差(最优值)I:单位矩阵Kt:当前时刻(t)的卡尔曼增益(估计值权重)Ht:观测函数H在x^t−处的雅克比矩阵Pt−:当前时刻(t)的先验状态协方差(预测值)
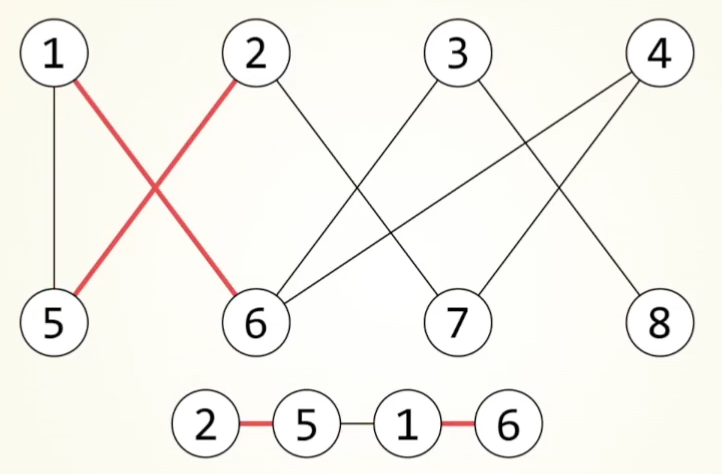
匈牙利算法
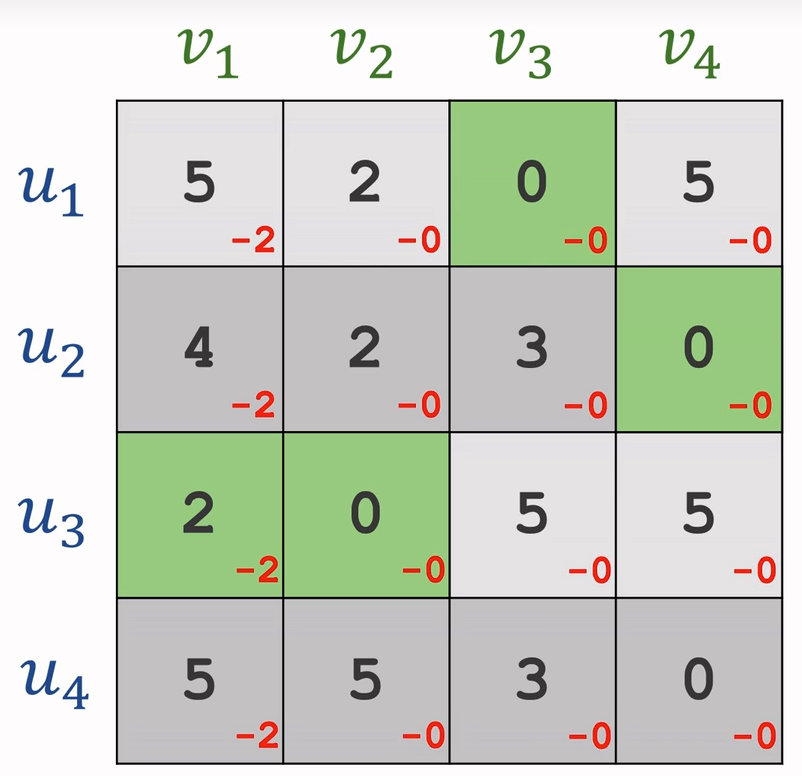
最小匹配
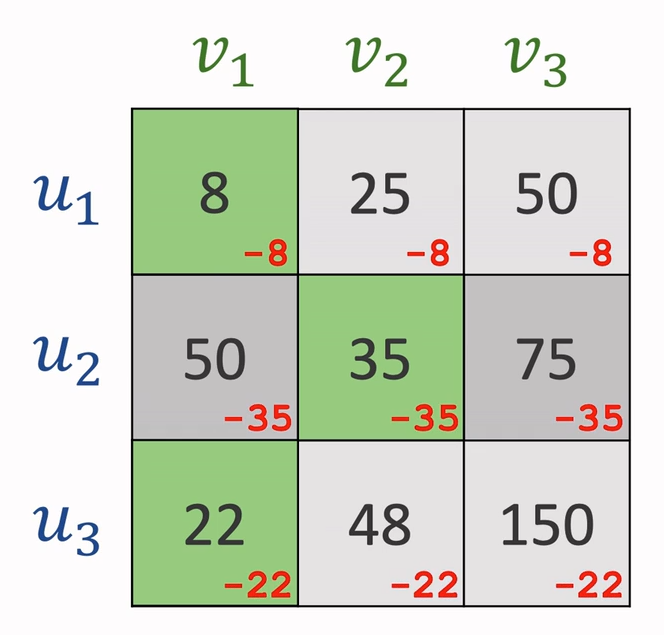
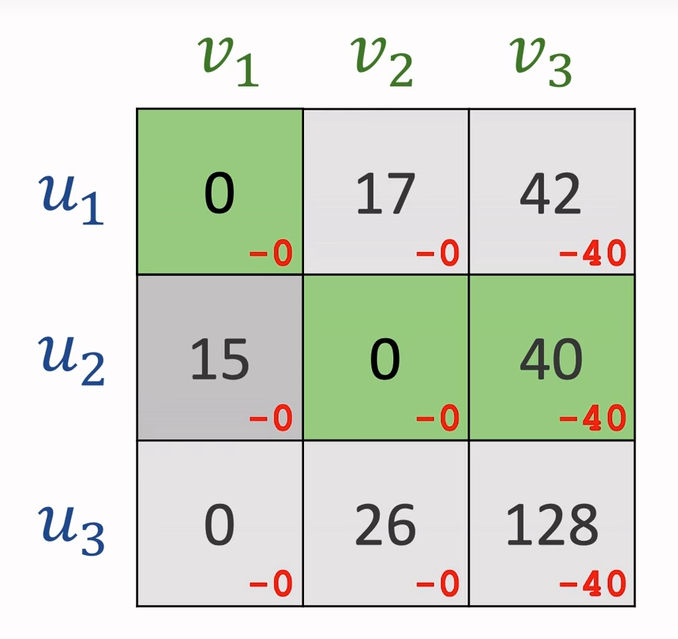
对于n*n的矩阵,先执行以下步骤:
- 每一行减去该行最小值
- 每一列减去该列最小值
接着进入循环
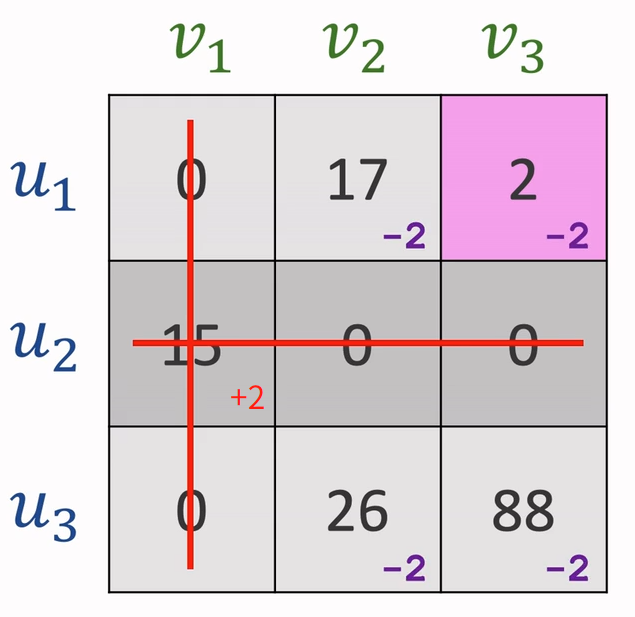
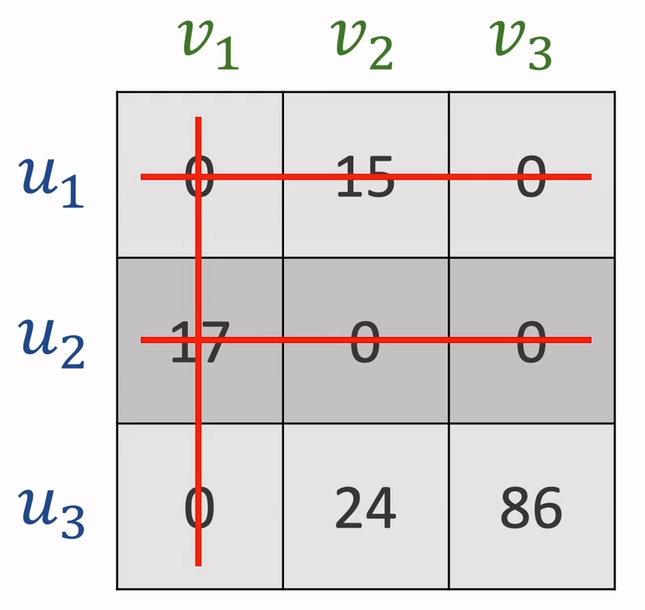
- 用最少的直线覆盖住所有0
- 若直线数=n,退出循环;若直线数<n,进行下一步
- 找出未被覆盖的数中的最小值设定为k,使所有未被覆盖的值减去k,已被覆盖的非0值加上k

接下来分配即可
最大匹配
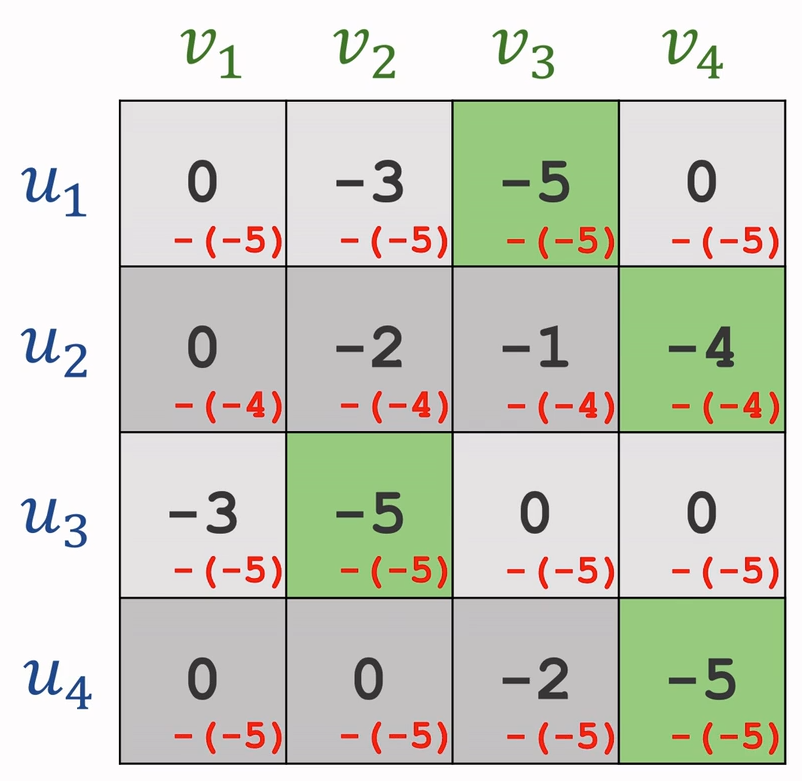
先对所有值取反,再进行最小匹配即可
class HungarianAlgorithm{
public:
Eigen::VectorXi solve(const MatrixXb& cost_matrix)
{
int n = cost_matrix.rows(); //代价矩阵的行数(跟踪器数量)
int m = cost_matrix.cols(); //代价矩阵的列数(检测框数量)
Eigen::VectorXi assignment = Eigen::VectorXi::Constant(n,-1); //存储每个跟踪器的匹配结果
Eigen::VectorXi visited = Eigen::VectorXi::Zero(m); //列访问标记
//匹配跟踪器和检测框
for(int i = 0;i < n;i++)
{
visited.setZero();
dfs(i, cost_matrix, assignment, visited);
}
return assignment;
}
private:
/*逻辑:
* 1. 遍历每个跟踪器,对每个跟踪器,遍历每个检测框
* 2. 如果cost_matrix[i,j]为true,且检测框j未被访问过,则直接占用该匹配
* 3. 如果检测框j已被匹配,则递归调用dfs函数,尝试寻找其他匹配
* 4. 如果找到匹配,则返回true,否则返回false
*/
//深度优先搜索匹配跟踪器和检测框
bool dfs(int i, const MatrixXb& cost_matrix, Eigen::VectorXi& assignment, Eigen::VectorXi& visited)
{
for(int j = 0;j < cost_matrix.cols();j++)
{
if(cost_matrix(i,j) && !visited(j))
{
visited(j) = 1;
if(assignment(j) == -1 || dfs(assignment(j), cost_matrix, assignment, visited))
{
assignment(j) = i;
return true;
}
}
}
return false;
}
};
KM算法
匈牙利算法的扩展,可以量化匹配代价(iou,外观相似度等)。引入了顶标机制(u,v),松弛操作(delta)和增广路径回溯(way)
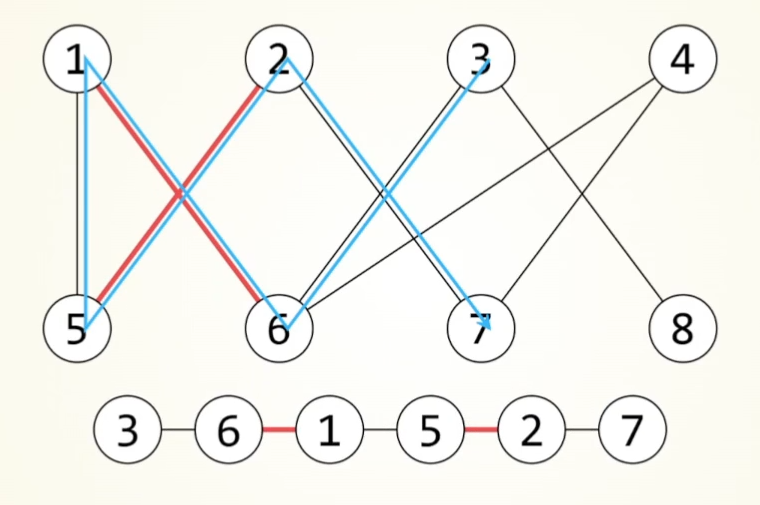
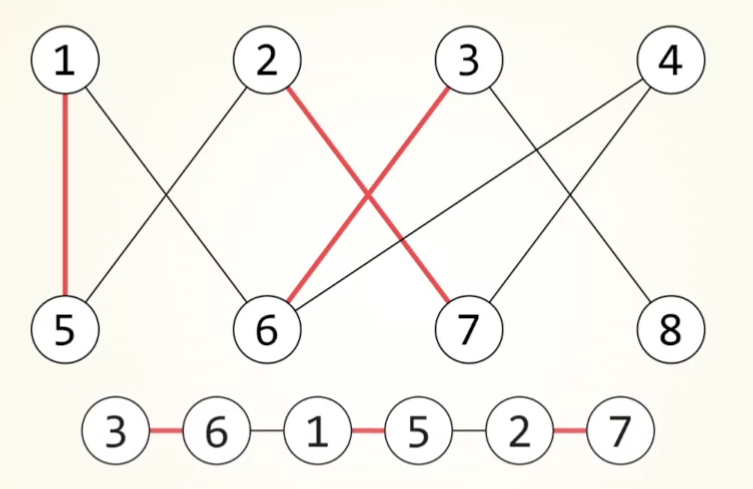
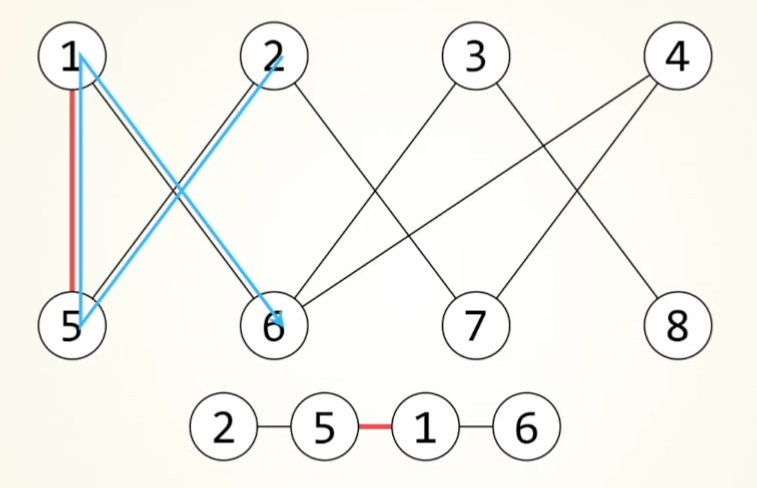
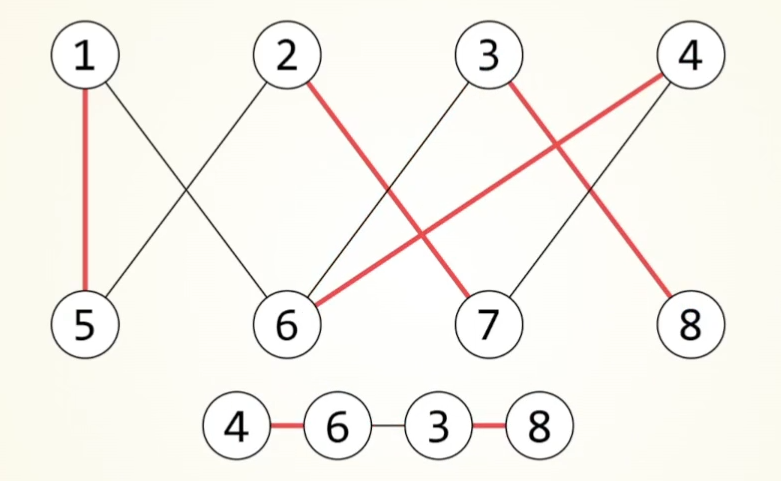
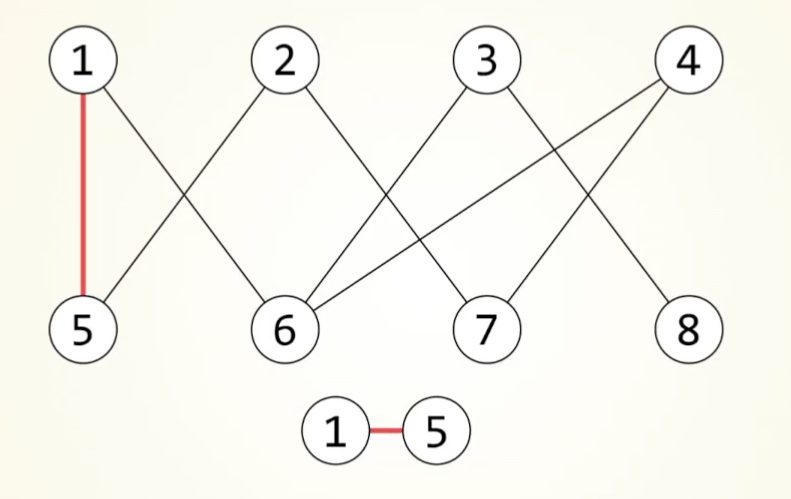
增广路径
对于二分图的最大匹配,从每一个点开始,都进行一次增广路径查找
deepsort算法
流程

大致流程:
Detection为预测到的框,Tracks为本次检测到的物体。
当检测到一个物体,对其直接进行iou匹配,如果没有对应的detection,初始化一个新的Track。
不确定状态:如若该目标连续匹配到3帧,其状态由不确定改为确定。该状态出现匹配丢失则直接舍弃。
确定状态:先进行级联匹配,对于指定帧数内,按照丢失次数多少排优先级,按优先级和对应的Detection进行匹配,未匹配上的进入iou匹配,对于丢失的物体,连续丢失超过阈值才进行舍弃。
(每次匹配成功都要更新卡尔曼参数,只有确认状态才会进行可视化)
级联匹配

按照丢失的帧率,由少到多排序进行匹配

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 11
11 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)