阵列信号处理(信源传播模型)
阵列信号处理的远场信源模型与近场信源模型介绍。
1.条件假设
为了方便研究,且不失一般性,对理论介绍过程中的阵元、快拍数、信号和噪声做如下假设:
阵元数M,信源数K,快拍数L。
<1>信源是非高斯、零均值、相互独立(信号的互相关系数为0)的窄带平稳过程。
<2>阵元噪声为理想高斯白噪声,并且与信源独立。
<3>阵元间距,且信源数小于阵元数,即K<M。
<4>接收阵列中所有阵元的特性完全相同,每个阵元接收到的信号只与其在空间中的位置有关,各个阵元之间不存在干扰和互耦性。
2.远场信源传播模型
远场接收均匀线阵列示意图如下:
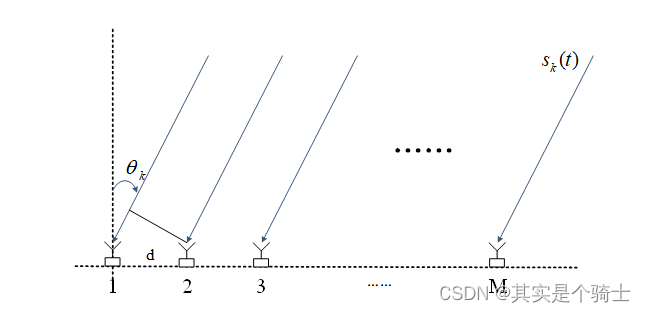
上图为M元均匀线阵,阵元间距为,空间来波信号到达均匀接收线阵的波达角度
记为均匀线阵的法线与空间来波信号的夹角。
假设在远场空间中有来波信号,来波信号的个数一共有K个,且来波信号之间为相互独立的窄带信号。
窄带信号:信号的带宽远小于其中心频率
,则该信号成为窄带信号,即:
通常将正弦信号和余弦信号称为正弦型信号,正弦形信号为典型的窄带信号。例如将10Hz和20Hz的正弦信号使用频率为10000Hz的正弦信号进行调制。窄带信号表示为。
其中,为幅度调制函数(实包络),
为中心频率对应的相位角频率
,
为相位调制函数。因此可以使用中心频率来表示窄带信号的信息。
将来波信号的中心频率定义为,则对于每个信号的角频率来说:
其中,为待估计信号的波长,c为光速,
为来波信号的角频率。假设将均匀线阵接收第
个远场信号的来波信号记为
,则
可以表示为:

其中为来波信号
的复包络,则延迟
时刻后波前信号为:

由于之前假设来波信号为窄带信号,根据窄带信号的性质可得:

代入上式可得:

假设第k个待估计信号以角度入射至阵列,将均匀线阵中第一个阵元视为参考阵元。则与到达下标m为的阵元的相比,时间差为:

对应的相位差为:

其中为了避免相位模糊,同一采样时刻,两个相邻阵元之间的相位差不超过,阵元间距不超过半波长,即
。
则在t时刻,第m个接收阵元采集到的空间来波中第k个窄带信号可以表示为:

式中,为空间中第k个来波信号到达第m个接收阵元相对参考阵元的影响因子,由于之前假设(4)中接收阵列中所有阵元性能相同,故
,
为空间远场第k个窄带信号到达接收阵列的角度值。
计算噪声信号和所有的来波信号,则接收阵列中第k个接收阵元在t时刻的接收信号为:

其中,是噪声矢量。令
。因此第k个阵元的采样信号为:

其中,表示远场来波信号中第
个窄带信号到达接收阵列中参考阵元时的信号。则均匀线阵的接收信号矢量的矩阵形式可以写成:
其中,为均匀线阵接收的采样数据矢量矩阵,
为阵列流型矩阵,
为信源矩阵,
为噪声矩阵,且:
由上式可以看出远场信号的阵列流型矩阵为Vandermonde矩阵,因此当空间入射信号从不同来波方向入射到接收阵列时,矩阵
为列满秩矩阵。
3.近场信源传播模型
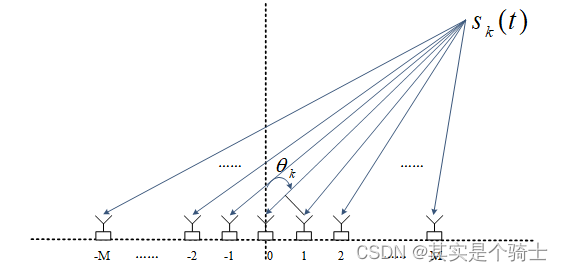
如图所示,当来波信号的信源与阵列中参考阵元之间的距离比较接近时,来波信号的传播方式不再是平面波,而需要将传播方式看为球面波,传播模型为近场信源模型。阵列中的阵元都处于信源的Fresnel域中:,
为阵列孔径。此时信源的参数还包含信源到参考阵元的距离,二者都需要进行估计。由于之前假设一共有
个相互独立的窄带信号,且假设新的近场接收均匀线阵一共有
个阵元,阵元下标为
到
,则下标为
的阵元接收到的信号可以表示为如下:

其中是快拍数,
是加性高斯白噪声,
表示来波信号中第
个信源到达下标为0的阵元的采样信号,
则是来波信号中第个信源到达下标为0的阵元与下标为
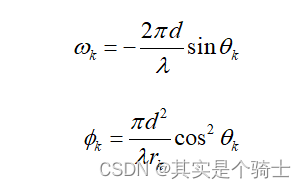
的阵元之间的相位差,根据三角形的余弦定理可以写成:

其中表示第
个信源的波达方向,
是其与0号阵元(即参考阵元)间的距离,且
,对上式做泰勒级数展开,并将三阶及其以上高阶泰勒级数是作为无穷小项,相位差
可以改写成:
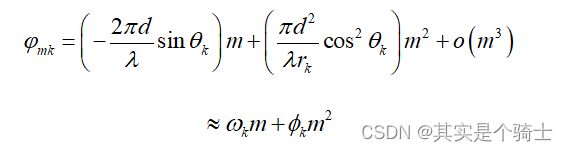
其中:
假设用矩阵形式来表达,公式中在时刻阵列的输出可以写成:
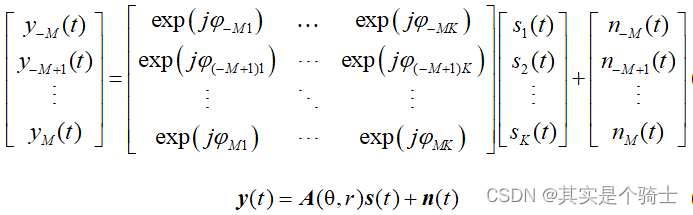
其中是信号的方向矩阵也是阵列流型矩阵,其第
列是如下方向向量:

和
分别为信号向量和噪声向量:
用如下矩阵来表示整个阵列的采样接收信号:
其中,为快拍数。
将近场信号源模型与远场信号源模型相比较,发现二者的主要区别在于阵列流型矩阵。远场信号源模型的阵列流型矩阵是只包含角度信息的矩阵
,而近场信号源模型的阵列流型矩阵
是包含角度信息与距离信息的矩阵,因此其算法复杂度大大增加。
[1]郝苏湘. 近场声源定位算法研究[D].西安电子科技大学,2021.DOI:10.27389/d.cnki.gxadu.2021.001004.

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 9
9 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)