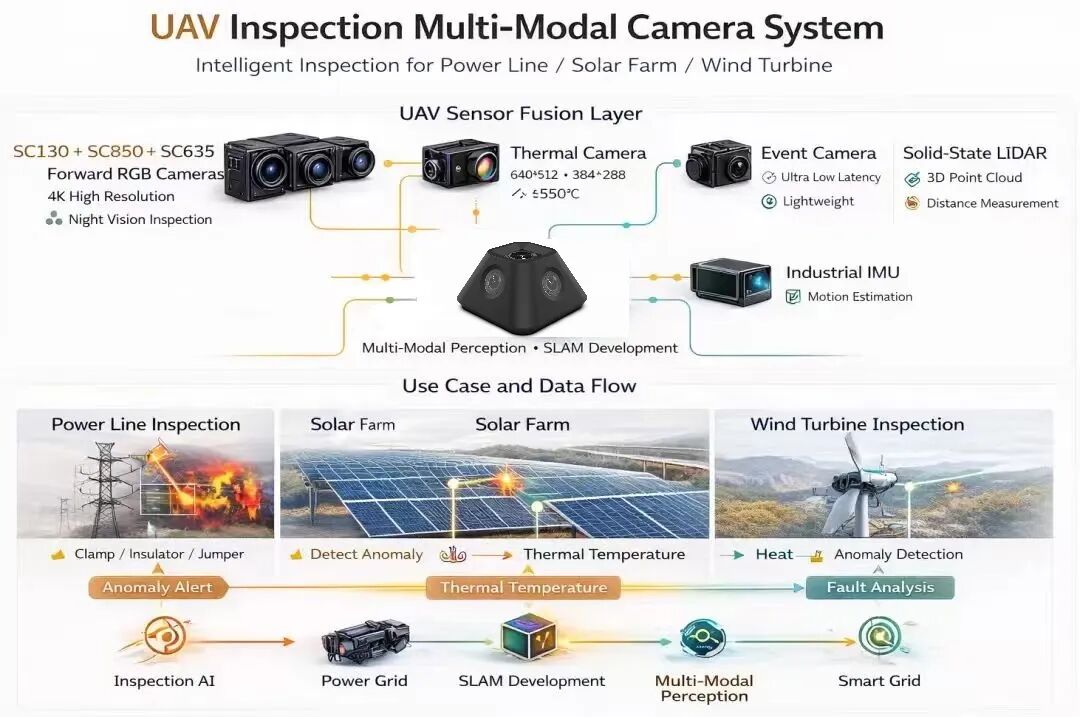
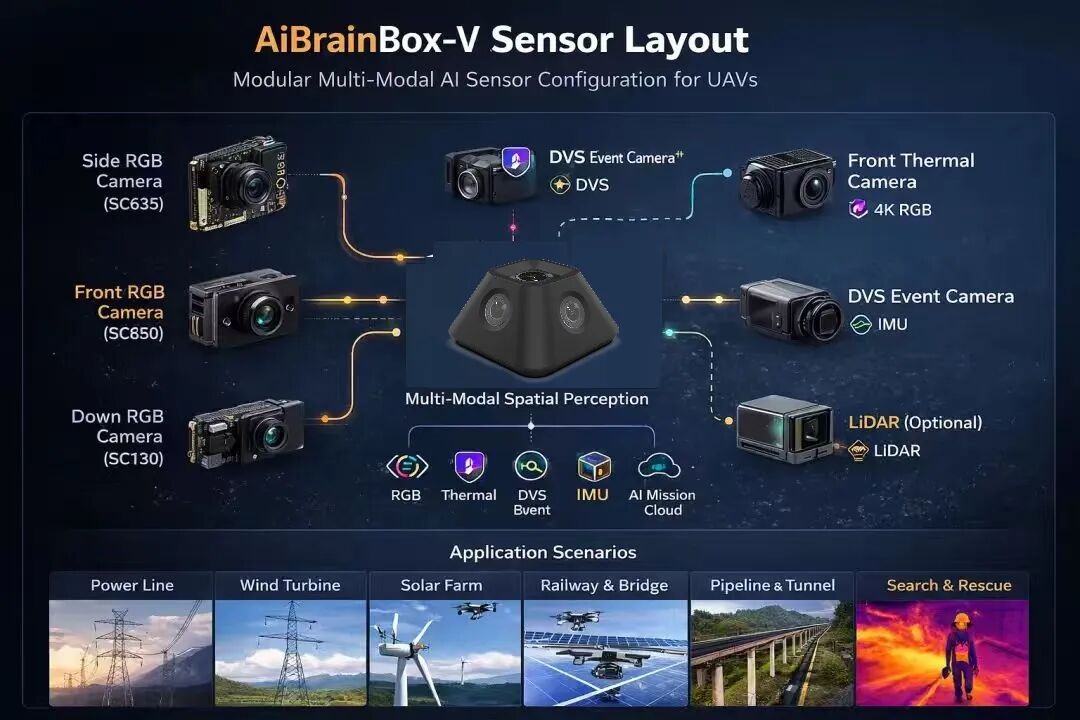
AiBrainBox-V的核心优势及应用场景分析vs四光吊舱C3-C5
AiBrainBox-V 本质不是摄像机,而是智能感知节点。新关键能力:Target Geo-Localization。AiBrainBox视觉相机通常:60–120 fps。2️⃣ Rolling shutter + 飞机振动。2️⃣ 没有 Rolling distortion。高速目标检测:AiBrainBox明显更强。形成组合:AiBrainBox-V + 吊舱。吊舱:Rolling Shu
AiBrainBox-V的核心优势及应用场景分析vs四光吊舱C3-C5

AiBrainBox-V的任务距离建议
1 目标检测(Detection)
例如:
-
人
-
车辆
-
动物
-
无人机
距离建议:
30–120 m
原因:
-
目标尺寸仍然足够
-
YOLO检测稳定
2 目标识别(Recognition)
例如:
-
判断车辆类型
-
判断是否有人
-
判断设备状态
距离建议:
20–80 m
3 精细识别(Identification)
例如:
-
绝缘子破损
-
电弧
-
工具掉落
-
安防行为
距离建议:
5–30 m
-
不同场景的建议距离
电力巡检
|
任务 |
距离 |
|---|---|
|
线路巡检 |
20–60 m |
|
绝缘子检测 |
10–30 m |
|
电弧检测 |
10–25 m |
铁路巡检
|
任务 |
距离 |
|---|---|
|
轨道巡检 |
30–80 m |
|
异物检测 |
20–60 m |
公路巡检
|
任务 |
距离 |
|---|---|
|
车辆识别 |
40–100 m |
|
事故检测 |
30–80 m |
安防巡逻
|
任务 |
距离 |
|---|---|
|
人员检测 |
20–80 m |
|
行为识别 |
10–40 m |

AiBrainBox-V 近距离优势
相比吊舱:
AiBrainBox-V 有三个核心优势。
1 Global Shutter
吊舱:Rolling Shutter
AiBrainBox:Global Shutter
优势:
-
无运动畸变
-
AI识别更稳定
-
SLAM精度高
2 更高帧率
AiBrainBox视觉相机通常:60–120 fps
吊舱:25–30 fps
高速目标检测:AiBrainBox明显更强。
3 多视角
AiBrainBox:
-
Front camera
-
Side camera
-
Down camera
可以:
-
3D感知
-
SLAM
-
避障
吊舱:单方向

AiBrainBox-V vs C3-C5
-
近距智能感知-AiBrainBox-V
-
远距观测-吊舱
形成组合:AiBrainBox-V + 吊舱
能力:
-
AI
-
SLAM
-
远距侦察
AiBrainBox-V 的核心价值(近距离智能感知)
AiBrainBox-V 本质不是摄像机,而是智能感知节点
能力包括:
|
能力 |
吊舱 |
AiBrainBox-V |
|---|---|---|
|
视频观察 |
✔ |
✔ |
|
AI检测 |
✖ |
✔ |
|
目标跟踪 |
✖ |
✔ |
|
视觉SLAM |
✖ |
✔ |
|
3D感知 |
✖ |
✔ |
|
自主导航 |
✖ |
✔ |
吊舱是“远距眼睛”
AiBrainBox是“智能大脑”
近距离监控能力(AiBrainBox优势)以 6MP Global Shutter 为例。
-
分辨率:3072×2048
-
FOV:80°
在不同距离的像素密度:
|
距离 |
地面宽度 |
像素密度 |
|---|---|---|
|
20 m |
28 m |
110 px/m |
|
50 m |
70 m |
43 px/m |
|
80 m |
112 m |
27 px/m |
|
120 m |
168 m |
18 px/m |
以 人(0.5m宽)为例:
|
距离 |
像素 |
|---|---|
|
20 m |
55 px |
|
50 m |
21 px |
|
80 m |
13 px |
|
120 m |
9 px |
对应能力:
|
像素 |
能力 |
|---|
40 px | 精细识别 |
15–40 px | 识别 |
8–15 px | 检测 |
AiBrainBox最佳识别距离:10 m – 80 m
Global Shutter vs Rolling Shutter
|
项目 |
AiBrainBox-V Side Camera |
C3 / C4 / C5 吊舱 |
|---|---|---|
|
Sensor |
6MP Global Shutter |
高分辨率 Rolling Shutter |
|
曝光方式 |
全局快门 | 卷帘快门 |
|
抗振动能力 |
强 |
中等 |
|
运动目标检测 |
稳定 |
容易形变 |
|
长焦远距观测 |
不适合 |
优势明显 |
-
核心区别:
全局快门(SC635):所有像素 同一时间曝光
优点:
-
无滚动畸变
-
飞机振动影响小
-
适合 AI检测
-
适合高速运动目标
卷帘快门:逐行曝光
在无人机场景会产生:
-
Rolling Distortion
-
倾斜
-
果冻效应
尤其在:
-
飞机振动
-
螺旋桨气流
-
长焦镜头
会明显放大。
-
80m以内检测能力对比
假设目标:人 / 车辆
AiBrainBox-V Side Camera
参数假设:
-
6MP
-
FOV ≈ 70°
-
Global shutter
-
YOLO检测
在 80 m 时:
目标像素:
|
目标 |
像素 |
|---|---|
|
人 |
60–120 px |
|
车辆 |
120–250 px |
完全满足 YOLO检测。
优势:
-
无滚动畸变
-
连续帧稳定
-
AI检测置信度高
C3 / C4 / C5 吊舱-优势是:长焦
但在 近距离 反而有问题:
1️⃣ FOV 太窄
例如:
C3 约 10–15°
在 80 m:
画面覆盖范围:
约 14–20 m
很容易丢目标。
2️⃣ Rolling shutter + 飞机振动
会出现:
-
图像倾斜
-
AI误检
-
tracking 不稳定
真正决定模糊严重程度的主要因素不是目标距离,而是 焦距(FOV)和曝光方式。
1 飞机抖动产生模糊的本质
无人机上的图像模糊主要来自 角运动(Angular Motion):
飞机会产生:
-
高频振动(螺旋桨)
-
姿态抖动(pitch / roll / yaw)
-
控制微振
这些都会造成 相机角度变化 Δθ。
图像模糊的像素位移近似:
pixelblur∝f×Δθpixel\ blur \propto f \times \Delta\thetapixelblur∝f×Δθ
其中:
-
f = 焦距
-
Δθ = 飞机角抖动
关键结论:
焦距越长,模糊越严重。
2 近距离 vs 远距离的真实区别
其实不是距离决定,而是 镜头焦距。
AiBrainBox-V Side Camera
典型参数:
-
FOV:60–90°
-
焦距:短
-
Global shutter
特点:
-
抖动造成像素移动很小
-
图像稳定
吊舱 C3 / C4 / C5
为了看远距离,使用:
|
型号 |
焦距 |
FOV |
|---|---|---|
|
C3 |
中焦 |
~10–15° |
|
C4 |
长焦 |
~5–8° |
|
C5 |
超长焦 |
~2–4° |
焦距非常长。
同样的抖动:
SideCamera → 1px blur
C3 zoom → 6px blur
C4 zoom → 15px blur
C5 zoom → 40px blur
所以:
长焦更容易模糊。
长焦画面比广角更容易抖。
所以吊舱必须有:
-
三轴云台稳定
-
EIS
-
短曝光
否则远距离画面会抖得很厉害。
AiBrainBox-V Wide Global Camera + Zoom Gimbal
本质就是:
|
任务 |
最优相机 |
|---|---|
|
AI检测 |
广角相机 |
|
远距识别 |
长焦吊舱 |
原因:
AI检测更需要稳定画面,而不是长焦。
在 80 m以内检测:
AiBrainBox-V 的
6MP Global shutter(SC635)
会有三个优势:
1️⃣ 抖动影响小
2️⃣ 没有 Rolling distortion
3️⃣ FOV 大更容易捕获目标
因此:
近距离 AI检测确实比吊舱更有优势。
|
距离 |
设备 |
任务 |
|---|---|---|
|
0–80 m |
AiBrainBox-V |
AI detection |
|
80–300 m |
C3 |
observation |
|
300–1500 m |
C4 |
surveillance |
|
1500–3000 m |
C5 |
reconnaissance |
1 AI检测需要多少像素
多数 YOLO 系列模型有一个经验值:
|
任务 |
目标最小像素 |
|---|---|
|
目标存在检测 |
20–30 px |
|
目标类别识别 |
40–60 px |
|
目标细节识别 |
80–120 px |
2 无人机视觉检测距离公式
目标像素高度:
P=H×N2Dtan(FOV/2)P = \frac{H \times N}{2D \tan(FOV/2)}P=2Dtan(FOV/2)H×N
变量:
|
符号 |
含义 |
|---|---|
|
P |
目标像素高度 |
|
H |
目标真实高度 |
|
N |
图像垂直分辨率 |
|
D |
距离 |
|
FOV |
垂直视场角 |
3 AiBrainBox-V Side Camera 参数
Sensor
SmartSens SC635
假设:
|
参数 |
数值 |
|---|---|
|
分辨率 |
3072 × 2048 |
|
垂直分辨率 |
2048 |
|
FOV |
70° |
4 人目标检测距离
假设人高度:H = 1.7 m
要求:P = 50 px
代入公式:得到:
D ≈ 120 m
结果:
|
距离 |
能力 |
|---|---|
|
120 m |
可检测 |
|
80 m |
稳定检测 |
|
50 m |
高置信度识别 |
5 车辆检测距离
假设车辆高度:H = 1.6 m
结果类似:
|
距离 |
能力 |
|---|---|
|
150 m |
可检测 |
|
100 m |
稳定检测 |
|
60 m |
高置信度 |
6 结合无人机抖动
无人机存在:
-
角抖动
-
图像压缩
-
AI推理降采样
工程上通常 打 0.6 系数
所以实际建议:
|
目标 |
AI检测距离 |
|---|---|
|
人 |
80–100 m |
|
车辆 |
100–120 m |
7 AiBrainBox-V 最优检测区
AiBrainBox-V AI detection zone
|
距离 |
能力 |
|---|---|
|
0–30 m |
精细识别 |
|
30–80 m |
AI最佳检测区 |
|
80–120 m |
可检测 |
|
120 m+ |
不稳定 |
实际系统工作流程
这也是很多军用无人机采用的架构:
Wide AI camera
↓
target detection
↓
calculate azimuth
↓
cue gimbal
↓
zoom identification
也就是:
Wide → Detect
Zoom → Identify
AiBrainBox-V 不应该定义为:
AI camera
而应该定义为:
AI Perception Node
能力:
-
AI detection
-
方位估计
-
吊舱指引
-
多机协同感知
AI Detection Range
Human detection: 80 m
Vehicle detection: 100 m

无人机感知体系的四层结构
无人机视觉感知通常可以分为 4个距离层级:
|
感知层 |
距离 |
核心任务 |
设备 |
|---|---|---|---|
|
Detection |
0–80 m |
AI目标发现 |
AiBrainBox-V |
|
Observation |
80–300 m |
目标观察 |
C3 |
|
Surveillance |
300–1500 m |
区域巡检 |
C4 |
|
Reconnaissance |
1500–3000 m |
远距侦察 |
C5 |
核心逻辑:
广角发现 → 长焦确认
AiBrainBox-V 的核心角色
AiBrainBox-V 的 Side Camera(6MP Global Shutter) 使用
SmartSens SC635
它的优势不是远距,而是:
1 稳定图像
Global Shutter:
-
无滚动畸变
-
抗振动
-
AI检测稳定
2 大视场
典型:70°–90° FOV
一次扫描覆盖大区域。
3 AI实时检测
-
YOLO
-
CLIP
实现:
|
功能 |
描述 |
|---|---|
|
目标检测 |
人 / 车 / 动物 |
|
目标分类 |
YOLO |
|
语义识别 |
CLIP |
|
方位估计 |
Bearing |
AiBrainBox-V → 吊舱联动逻辑
Sensor Cueing&Gimbal Cueing完整流程:
AiBrainBox SideCamera
↓
YOLO detection
↓
目标方位估计
↓
发送目标坐标
↓
云台转向
↓
C3/C4/C5变焦
↓
远距识别
为什么必须做联动
如果没有联动:
吊舱需要:
-
人工控制
-
手动搜索
效率非常低。
如果有联动:
目标发现时间:
|
模式 |
时间 |
|---|---|
|
人工搜索 |
10–60 s |
|
AI Cueing |
1–3 s |
-
典型应用场景
1 电力巡检
流程:
SideCamera
发现异常
↓
吊舱放大
↓
红外检查
2 边境巡逻
SideCamera发现目标
↓
吊舱锁定
↓
远距观察
3 搜救任务
AI检测人体
↓
吊舱确认
↓
红外搜索

AiBrainBox-V 产品定位-Edge AI Perception Node
核心能力:
|
能力 |
说明 |
|---|---|
|
AI detection |
YOLO |
|
语义理解 |
CLIP |
|
方位估计 |
Target bearing |
|
吊舱联动 |
Gimbal cueing |
|
协同感知 |
Multi-drone |
新关键能力:Target Geo-Localization
AI检测目标后:
结合:
-
IMU
-
飞控姿态
-
相机内参
计算:目标经纬度
AiBrainBox
发现目标
↓
计算GPS
↓
发送坐标
↓
吊舱指向
这会让系统能力提升一个层级。
无人机智能感知平台:
AiBrainBox-V
│
├─ Wide AI perception
│
├─ Target detection
│
├─ Target bearing
│
└─ Gimbal cueing
│
▼
EO/IR Gimbal
(C3 / C4 / C5)

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 12
12 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)