光电对抗:仿生飞行器的飞特征和反侦察能力及其光电对抗和防卫能力建设
自主飞行智能控制:这是发展趋势和高端应用的核心。飞行器搭载集成微处理器、陀螺仪、加速度计与通讯模块的微型飞控系统,通过预编程任务或机载AI实时处理传感器信息,自主决策飞行路径和动作,极大减少对持续远程操控的依赖,增强了独立性和隐蔽性。随着材料科学、微电子技术、人工智能和能源技术的进步,仿生飞行器正朝着更智能、更自主、更集成、功能更强的方向发展。系留光缆/光纤:对于系留型仿生飞行器(虽不完全是仿生,

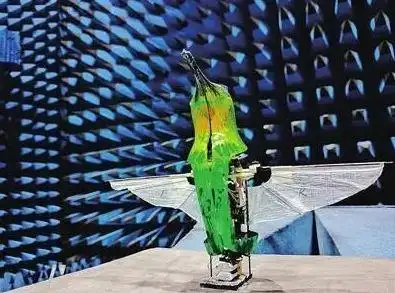
仿生蚊子
第一节:仿生飞行器的种类和特征及其反侦察技术
一、仿生飞行器的种类与飞行特征
仿生飞行器主要模仿鸟类、昆虫等生物的飞行方式,大致可分为以下几类:
(一)扑翼飞行器 (Flapping-Wing MAVs)
1. 仿生原理:
模仿鸟类或昆虫的翅膀拍动方式产生升力和推力。例如蜂鸟、苍蝇、蜻蜓等。
2. 飞行特征:
高超的机动性:能够实现快速转向、悬停、倒飞等高难度动作。
隐蔽性强:其飞行姿态和声音与真实鸟类或昆虫相似,低空飞行时难以被雷达或肉眼识别。
能量效率较高:在低雷诺数条件下,扑翼飞行相比固定翼和旋翼飞行往往能获得更高的升力效率。
3. 典型代表:
仿蜂鸟飞行器:如北航研制的微型可悬停扑翼飞行器,重量轻于一颗鸡蛋,能模拟蜂鸟的悬停(翅膀拍动频率可达80次/秒)、强抗扰和强机动能力。
仿昆虫飞行器:如哈佛大学的RoboBee(机器蜂),重量仅毫克级,可实现空中悬停和水下运动。
(二)固定翼/滑翔式仿生飞行器
-
仿生原理:模仿鸟类滑翔或植物种子飘落的空气动力学特性,通常无动力或间歇性提供动力。
-
飞行特征:续航时间长、噪音极低、结构简单,适合长时间、大范围的区域监视或环境监测。
-
典型代表:一些模仿鸟类滑翔的被动式微型飞行器。
(三)复合型及特种仿生飞行器
结合多种生物特征或针对特定功能设计。典型代表:
-
仿蝙蝠机器人:四肢关节采用形状记忆合金,肌肉用智能材料合金组成,具有超强弹性,能提供全系列运动并返回滑翔状态。
-
低噪音隐身仿生可折叠扑翼微飞行器:如吉林大学设计的可折叠扑翼,飞行后可收拢,并采用等离子体发射装置等技术实现“隐身”和低噪音。
-
仿萤火虫通信无人机:西北工业大学研制,模仿萤火虫通过闪光传递信息的方式,利用光通信在电磁干扰下实现信息传递。

不同仿生飞行器的特特征及应用场景
二、反侦察技术
仿生飞行器由于其设计初衷就包含了高度的隐蔽性,其在反侦察方面有着天然和人为强化的技术优势:
1. 低可探测性(隐身技术)
视觉隐身:外形、颜色、飞行姿态高度模仿真实鸟类或昆虫,肉眼难以分辨。部分设计采用光学迷彩或可变色材料以适应环境。
雷达隐身:体积小,雷达反射截面(RCS)极小。外形设计常采用圆滑曲线和吸波材料,降低雷达回波。
红外隐身:电动马达功率小,热信号微弱,红外探测设备难以发现。
声学隐身:扑翼飞行器模仿生物飞行声音,噪音低(如仿蜂鸟飞行器仅发出细微嗡鸣),难以被声学设备捕捉或易被环境音掩盖。
2. 低可追踪性
不规则飞行路径:模仿鸟类或昆虫无规律的飞行轨迹,增加预测和跟踪难度。
智能规避:搭载微型传感器和AI芯片,能自动感知并规避障碍物及威胁区域。
3. 电磁屏蔽与低辐射
采用低概率截获(LPI)技术:如跳频、扩频、定向数据链,降低无线电信号被侦测的风险。
特殊通信方式:如仿“萤火虫”无人机使用光通信替代无线电,几乎不受电磁干扰影响,且难以被传统无线电侦察设备发现。
任务静默:可预编程自主飞行,任务过程中不发射或少发射电磁信号。
仿生蜜蜂
三、数据传输与远程操控
仿生飞行器在数据传输和远程操控方面面临着微型化、低功耗和隐蔽性的挑战:
1. 数据传输
常规无线电数据链:多数小型仿生飞行器采用小型化、低功耗的无线电数传模块。但其传输速率、距离和抗干扰能力相对有限。
光通信:西北工业大学仿“萤火虫”无人机提供了新思路,通过机载照明设备发出光信号,另一架无人机用光电传感器捕获并解析信息。优点是抗电磁干扰能力强、难以被截获、发射功率低;缺点是受天气和视线影响大,适合短距离集群协同。
系留光缆/光纤:对于系留型仿生飞行器(虽不完全是仿生,但技术可借鉴),可通过系留缆绳中的光纤进行高速、稳定、抗干扰的有线数据传输,但牺牲了机动性。
未来可能技术:量子通信(超高安全性)、生物信号模拟(更难侦测)。
2. 远程操控
遥控器操控:适用于视距内、对隐蔽性要求不高的实验或应用场景。
自主飞行智能控制:这是发展趋势和高端应用的核心。飞行器搭载集成微处理器、陀螺仪、加速度计与通讯模块的微型飞控系统,通过预编程任务或机载AI实时处理传感器信息,自主决策飞行路径和动作,极大减少对持续远程操控的依赖,增强了独立性和隐蔽性。例如北航的仿蜂鸟飞行器拥有毫秒级反应速度的“神经中枢”,能精准实现姿态调节、抗扰控制与空中悬停。
集群协同控制:通过分布式智能算法,集群内部可通过局部通信(光信号、弱无线电) 实现自组织、自适应编队和任务分配,无需中心节点持续强力遥控。
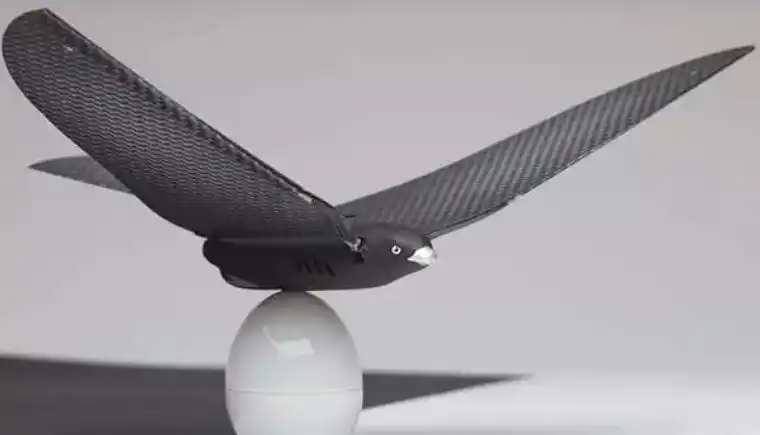 仿生鹰
仿生鹰
四、技术升级和发展趋势
仿生飞行器技术正在不断演进,未来可能在以下方面取得突破:
1. 能源与动力系统
高性能微型电池:开发能量密度更高、重量更轻的微型电池是延长续航的关键。
能量收集技术:集成柔性太阳能电池(如某些设计将翅膀设计为薄膜太阳能电池)、振动能量收集甚至从环境中获取能量。
新型驱动方式:研发仿生肌肉(如电致伸缩聚合物、形状记忆合金6)、更高效的微型电机和传动机构。
2. 材料与结构
轻量化高强度材料:广泛应用碳纤维、高强度尼龙复合材料、石墨烯等新材料。
智能材料与结构:采用可变刚度材料、可变翼型结构,使飞行器能根据不同飞行状态自适应调整形态,优化气动性能。
柔性电子与共形天线:将电子设备(如天线、传感器)无缝集成于机体或翅膀蒙皮中,减少空气阻力,提升隐蔽性和可靠性。
3. 智能自主化
先进人工智能:深度融合机器学习、计算机视觉,提升环境感知、自主导航、目标识别、决策和集群协同的智能化水平。
更强的环境适应性:能更好地在复杂气流、恶劣天气(如小雨)下稳定飞行。
仿生智能集群:大规模集群通过仿生算法(如鸟群、鱼群)实现高度自主的协同作业,完成复杂任务。
4. 功能集成与模块化
平台载荷一体化:如“昆虫级平台载荷一体化小型仿生飞行器”,在极有限的空间内集成音视频采集、飞行控制、数据处理、自供能(太阳能)、无线数据传输等多种功能。
模块化设计:允许根据任务需求快速更换不同的任务载荷(如传感器、微型摄像头、采样装置),提升通用性。
5. 应用领域拓展
基础设施检查:如桥梁、管道、高压线、风力发电机叶片的内部或外部检查。
农业与环境监测:作物健康监测、病虫害预警、野生动物追踪、环境数据采集。
搜救与安全:灾后废墟人员搜寻、危险环境勘察(如化工厂泄漏)、消防火情侦察。
影视航拍与娱乐:提供独特的鸟类视角。
教育科研:生物行为研究、航空航天知识普及。
国防领域:隐蔽侦察、监视、目标指示、电子对抗、心理战(释放假信息)甚至微型攻击。
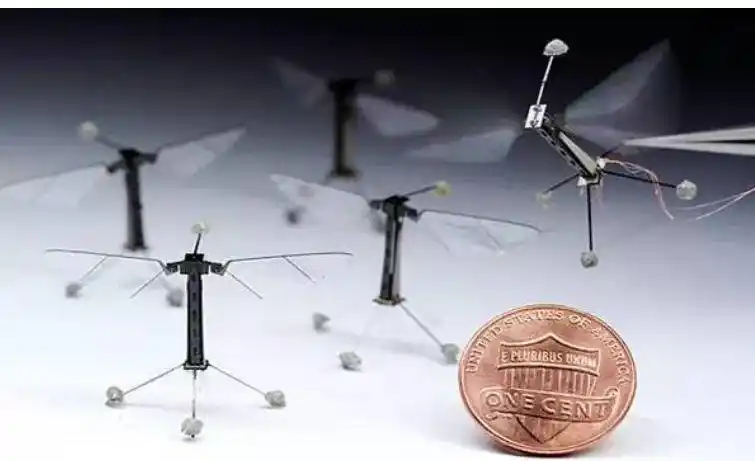
仿生蜂
五、总结
仿生飞行器代表了微型飞行器技术的前沿,其核心价值在于通过模仿自然界的飞行智慧,实现了极高的隐蔽性、出色的机动性和良好的环境适应性。随着材料科学、微电子技术、人工智能和能源技术的进步,仿生飞行器正朝着更智能、更自主、更集成、功能更强的方向发展。
然而,也面临着续航时间、负载能力、复杂环境下的可靠性以及成本等方面的挑战。未来,我们可能会看到更多混合仿生设计(结合多种生物优点)和跨学科技术融合的产物,在各种军民应用中发挥“以小博大”的重要作用。


有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 9
9 0
0- 0



 已为社区贡献63条内容
已为社区贡献63条内容

所有评论(0)