线性多智能体系统一致性的分布式动态事件触发控制方法附Matlab代码
安全运行。例如,在系统轻载和重载时,负荷阻抗不同,通过对第三段动作阻抗的合理整定,可以保证在各种运行方式下,保护装置既能躲过正常运行时的负荷阻抗,又能在故障时可靠动作。线性多智能体系统一致性的分布式动态事件触发控制方法引入了一种动态事件触发机制,其中包括一些现有的静态事件触发机制作为其特殊情况。其次,基于这种动态事件触发机制,开发了一种分布式控制协议,该协议确保所有智能体能够以指数收敛速度达成共识
✅作者简介:热爱科研的Matlab仿真开发者,擅长毕业设计辅导、数学建模、数据处理、建模仿真、程序设计、完整代码获取、论文复现及科研仿真。
🍎 往期回顾关注个人主页:Matlab科研工作室
👇 关注我领取海量matlab电子书和数学建模资料
🍊个人信条:格物致知,完整Matlab代码获取及仿真咨询内容私信。
🔥 内容介绍
-
安全运行。例如,在系统轻载和重载时,负荷阻抗不同,通过对第三段动作阻抗的合理整定,可以保证在各种运行方式下,保护装置既能躲过正常运行时的负荷阻抗,又能在故障时可靠动作。
线性多智能体系统一致性的分布式动态事件触发控制方法引入了一种动态事件触发机制,其中包括一些现有的静态事件触发机制作为其特殊情况。其次,基于这种动态事件触发机制,开发了一种分布式控制协议,该协议确保所有智能体能够以指数收敛速度达成共识。
线性多智能体系统一致性的分布式动态事件触发控制方法:背景与原理
一、背景
(一)多智能体系统一致性问题的重要性
多智能体系统在众多领域有着广泛应用,如分布式传感器网络、自主机器人编队、智能电网等。在这些应用场景中,实现多智能体系统的一致性至关重要。例如,在分布式传感器网络里,各个传感器节点作为智能体,需要就监测数据达成一致,以便准确地感知和分析环境信息;在自主机器人编队中,机器人要在位置、速度等状态上达成一致,从而实现协同作业。一致性保证了多智能体系统能够有效地完成共同任务,提高系统的整体性能和可靠性。
(二)传统静态事件触发机制的不足
- 资源浪费
:传统的静态事件触发机制通常依据智能体当前状态与某个参考状态的偏差来决定是否触发事件进行信息交互。由于仅依赖当前时刻的状态信息,这种方式往往会导致频繁的事件触发。例如,在智能体状态变化较为平缓时,仍然可能因当前状态与参考状态的微小偏差而触发事件,使得智能体之间进行不必要的通信,造成通信资源和能量的浪费。尤其在大规模多智能体系统或资源受限的环境(如无线传感器网络中节点能量有限)中,这种资源浪费问题更为突出。
- 缺乏灵活性
:静态事件触发机制的触发条件一旦设定,在系统运行过程中难以根据实际情况进行动态调整。然而,多智能体系统的运行环境往往是复杂多变的,不同阶段或不同场景下,对事件触发的频率和时机要求可能不同。静态触发机制无法很好地适应这种变化,限制了系统性能的进一步提升。
(三)分布式动态事件触发控制的意义
- 资源优化利用
:引入分布式动态事件触发机制,能够根据智能体的运行状态动态调整事件触发条件,避免不必要的信息交互。这不仅可以减少通信资源的消耗,还能降低智能体的能量损耗,提高系统的资源利用效率,延长系统的运行寿命。例如,在一些对能耗要求严格的应用场景中,动态事件触发机制可以显著减少智能体之间的通信次数,从而节省能量。
- 提升系统性能
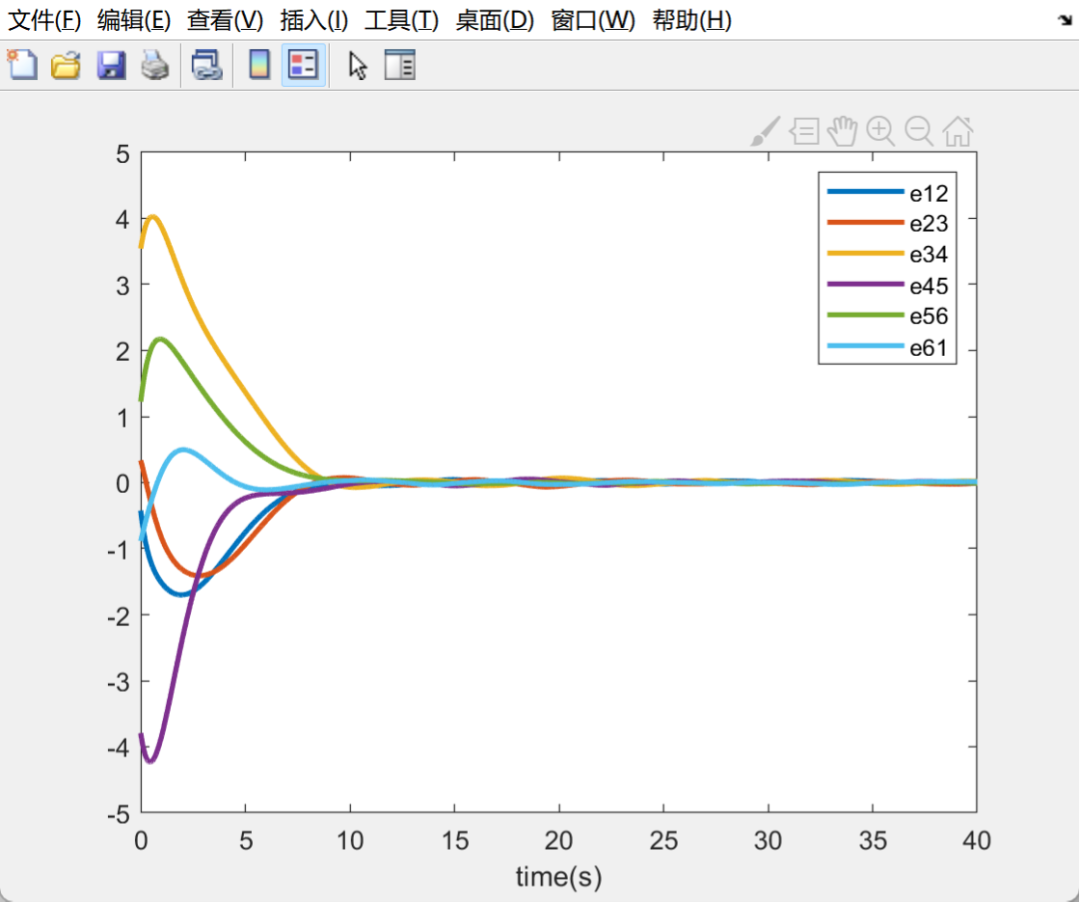
:基于动态事件触发机制开发的分布式控制协议,能够使所有智能体以指数收敛速度达成共识。相比传统方法,指数收敛速度更快,意味着系统能够更迅速地实现一致性,提高了系统的响应速度和整体性能。在诸如实时监测、协同控制等对时间要求较高的应用中,快速达成共识对于及时准确地完成任务至关重要。
二、原理
(一)动态事件触发机制原理
- 综合考虑多因素
:动态事件触发机制不再仅仅依赖智能体的当前状态,而是综合考虑智能体的多种因素来确定事件触发时机。除了当前状态与参考状态的偏差外,还可能包括智能体状态的变化趋势、历史状态信息等。例如,通过引入一个内部动态变量来记录智能体状态的变化速率,当状态变化速率较小时,适当放宽触发条件,减少事件触发频率;而当状态变化速率较大时,收紧触发条件,及时触发事件以保证信息的及时交互。
- 包含静态触发机制作为特殊情况
:这种动态事件触发机制具有通用性,一些现有的静态事件触发机制可以看作是它的特殊情况。例如,当动态事件触发机制中的某些动态因素固定不变时,就退化为传统的静态触发机制。这意味着该动态机制在兼容传统方法的基础上,提供了更灵活、更高效的事件触发方式。
(二)基于动态事件触发机制的分布式控制协议原理
- 分布式控制架构
:在多智能体系统中,每个智能体独立运行分布式控制协议。智能体之间通过局部通信获取邻居智能体的信息,而不是依赖于全局信息。这种分布式架构具有良好的可扩展性和鲁棒性,即使部分智能体出现故障或通信中断,其他智能体仍能继续运行协议,保证系统的基本功能。
三)动态事件触发机制与分布式控制协议的协同工作原理
- 触发 - 控制协同流程
:动态事件触发机制为分布式控制协议提供触发信号。当智能体的状态满足动态事件触发条件时,触发事件,智能体向邻居智能体发送自身状态信息,并接收邻居智能体的信息。然后,智能体依据分布式控制协议,根据接收到的信息更新自身状态。更新后的状态又会影响下一次事件触发条件的判断,如此循环往复,形成一个动态的触发 - 控制协同过程。
- 自适应调整
:随着多智能体系统的运行,动态事件触发机制能够根据智能体状态的变化自适应地调整事件触发频率,从而使分布式控制协议在不同情况下都能有效地工作。例如,在系统初始阶段,智能体状态差异较大,事件触发频率较高,以便快速传播信息,加速状态收敛;而当智能体状态逐渐接近一致时,事件触发频率自动降低,减少不必要的通信,同时分布式控制协议持续微调智能体状态,确保最终达成精确的共识。
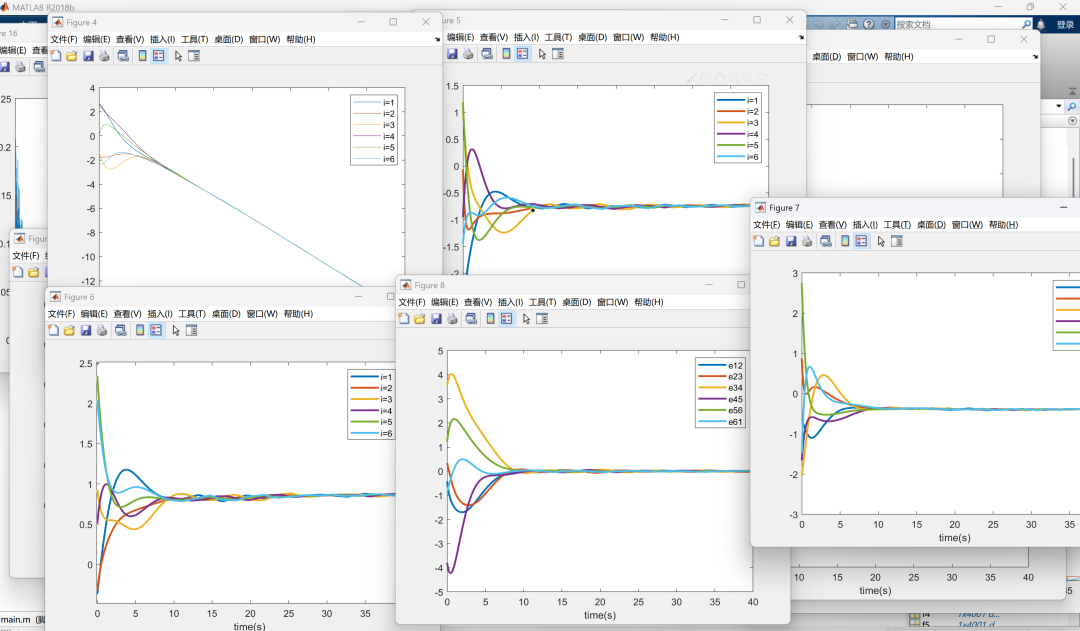
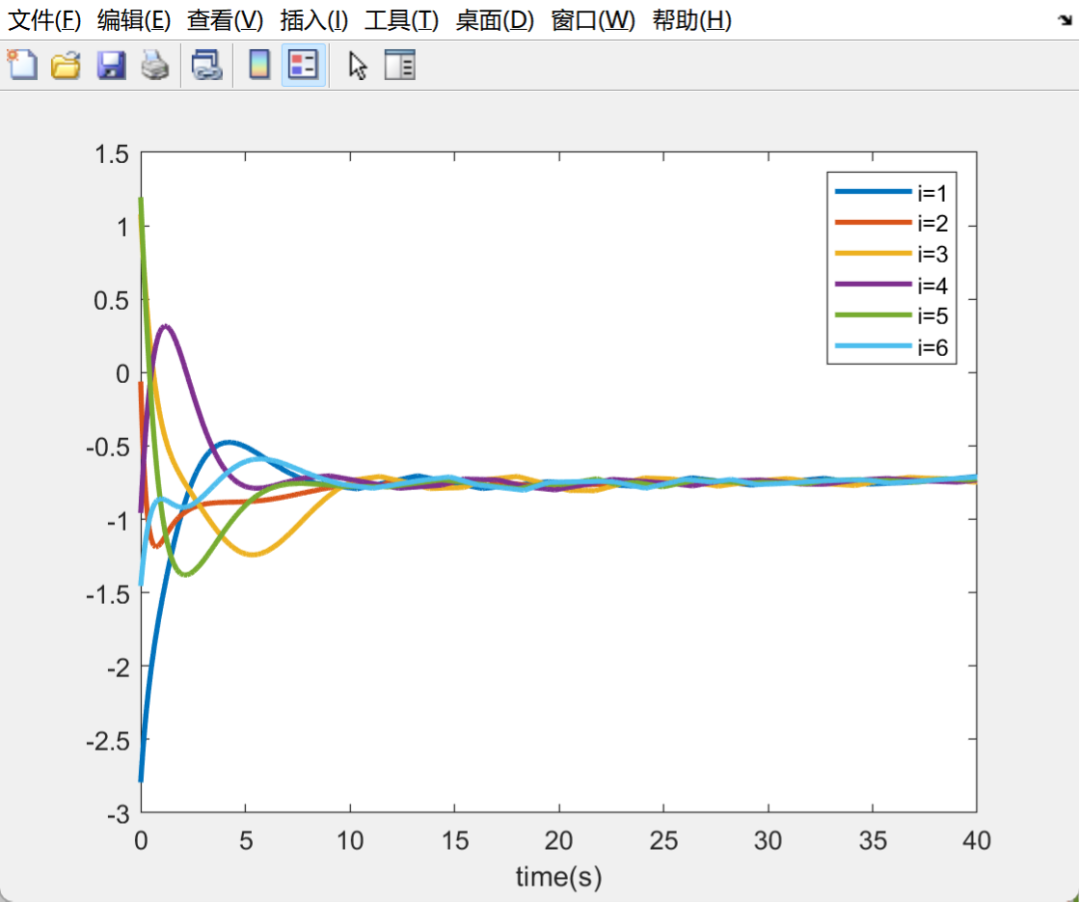
⛳️ 运行结果
![]()
🍅往期回顾扫扫下方二维码

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 0
0 0
0- 0



 已为社区贡献181条内容
已为社区贡献181条内容

所有评论(0)