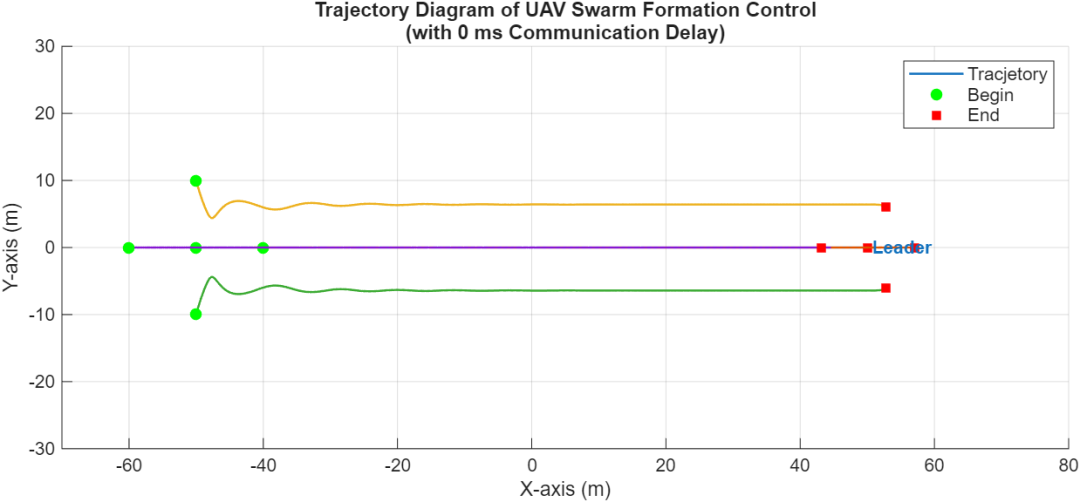
【多智能体】基于领导者-跟随者的无人机群编队控制仿真,包含碰撞检测、轨迹规划以及基于力模型的控制算法附matlab代码
随着无人机技术的不断发展,无人机群编队控制在众多领域展现出巨大的应用潜力。在军事领域,无人机群编队可执行侦察、监视、攻击等任务,通过协同作战提高作战效能。例如,在边境巡逻中,多架无人机编队飞行,能够扩大侦察范围,及时发现潜在威胁。在民用领域,无人机群编队可应用于物流配送、农业植保、电力巡检、大型活动表演等场景。比如在物流配送中,多架无人机编队可同时运输货物,提高配送效率;在农业植保中,无人机编队能
✅作者简介:热爱科研的Matlab仿真开发者,擅长毕业设计辅导、数学建模、数据处理、建模仿真、程序设计、完整代码获取、论文复现及科研仿真。
🍎 往期回顾关注个人主页:Matlab科研工作室
👇 关注我领取海量matlab电子书和数学建模资料
🍊个人信条:格物致知,完整Matlab代码获取及仿真咨询内容私信。
🔥 内容介绍
一、背景
(一)无人机群编队控制的应用前景
随着无人机技术的不断发展,无人机群编队控制在众多领域展现出巨大的应用潜力。在军事领域,无人机群编队可执行侦察、监视、攻击等任务,通过协同作战提高作战效能。例如,在边境巡逻中,多架无人机编队飞行,能够扩大侦察范围,及时发现潜在威胁。在民用领域,无人机群编队可应用于物流配送、农业植保、电力巡检、大型活动表演等场景。比如在物流配送中,多架无人机编队可同时运输货物,提高配送效率;在农业植保中,无人机编队能更均匀地对农田进行农药喷洒,提升作业质量。
(二)面临的挑战
- 碰撞风险
:多架无人机在编队飞行过程中,由于飞行环境复杂多变,如存在障碍物、气流干扰等,以及无人机自身的飞行误差,容易发生碰撞事故。碰撞不仅会导致无人机损坏,还可能影响任务的顺利执行,甚至对地面人员和财产造成威胁。因此,如何有效地检测和避免无人机之间以及无人机与障碍物之间的碰撞,是无人机群编队控制面临的重要挑战之一。
- 轨迹规划难题
:为了实现高效的编队飞行和任务执行,无人机需要规划出合理的飞行轨迹。然而,不同的任务场景对轨迹规划有不同的要求,例如在电力巡检任务中,无人机需要沿着电力线路飞行,同时要避开障碍物;在活动表演中,无人机需要按照预设的图案和节奏飞行。此外,动态变化的环境因素,如突发的障碍物或其他飞行器的闯入,也要求无人机能够实时调整轨迹,这增加了轨迹规划的复杂性。
- 协同控制复杂性
:无人机群中的每架无人机都需要与其他无人机协同工作,以保持编队的稳定性和完成共同任务。这需要设计有效的控制算法,使无人机能够根据自身状态和其他无人机的信息,调整飞行姿态和速度。由于无人机数量较多,且飞行状态不断变化,如何在保证控制效果的同时,降低算法的计算复杂度和通信负担,是协同控制面临的关键问题。
(三)基于领导者 - 跟随者模式的优势
- 简化控制结构
:基于领导者 - 跟随者的模式将无人机群分为领导者和跟随者两类。领导者根据任务需求规划飞行轨迹并引领编队飞行,跟随者则通过跟踪领导者的状态来调整自身飞行,从而实现编队的整体运动。这种模式简化了控制结构,降低了每架无人机的决策复杂度,使得控制算法更容易设计和实现。
- 提高灵活性和适应性
:在这种模式下,当任务需求或环境发生变化时,只需要调整领导者的飞行轨迹,跟随者即可相应地做出调整,整个编队能够快速适应变化。例如,在遇到突发障碍物时,领导者可以改变飞行方向,跟随者自动跟随调整,保持编队的完整性。这种灵活性使得无人机群能够更好地应对复杂多变的任务场景。
二、原理
(一)碰撞检测原理
- 基于传感器的检测
:无人机通常配备多种传感器,如激光雷达、毫米波雷达、视觉传感器等,用于实时感知周围环境。激光雷达通过发射激光束并测量反射光的时间来获取障碍物的距离和位置信息,能够提供高精度的三维环境数据。毫米波雷达利用毫米波频段的电磁波检测目标的距离、速度和角度,对运动目标的检测具有较高的灵敏度。视觉传感器通过图像处理技术识别障碍物,能够提供丰富的视觉信息。这些传感器实时采集的数据被传输到无人机的控制系统,用于检测潜在的碰撞风险。
- 基于通信的检测
:无人机之间通过无线通信交换位置、速度等信息。每架无人机根据自身和其他无人机的状态信息,预测未来的位置变化,判断是否存在碰撞风险。例如,通过计算两架无人机在未来某个时刻的预测位置之间的距离,如果该距离小于安全阈值,则认为存在碰撞风险。这种基于通信的检测方式可以提前发现无人机之间的潜在碰撞,为采取避碰措施争取时间。
(二)轨迹规划原理
- 领导者轨迹规划
:领导者根据任务目标和环境信息规划飞行轨迹。常见的轨迹规划算法包括 A算法、Dijkstra 算法等基于图搜索的方法,以及遗传算法、粒子群优化算法等智能优化算法。例如,在 A算法中,将飞行空间离散化为网格,通过计算从起点到各个网格点的代价(包括已经走过的路径代价和到目标点的估计代价),选择代价最小的网格点进行扩展,逐步搜索出从起点到目标点的最优路径。在实际应用中,领导者还需要考虑飞行约束条件,如最大飞行速度、转弯半径等,以确保规划出的轨迹是可行的。
- 跟随者轨迹生成
:跟随者根据领导者的位置、速度等信息生成自己的飞行轨迹。一种常见的方法是基于相对位置和速度的跟踪策略,跟随者通过调整自身的位置和速度,使其与领导者保持一定的相对距离和角度。例如,跟随者可以根据领导者的位置和速度,计算出自己需要到达的目标位置和速度,然后通过控制算法调整自身飞行,逐步接近目标位置。在生成轨迹过程中,跟随者同样需要考虑自身的飞行约束条件以及避免与其他无人机和障碍物发生碰撞。
(三)基于力模型的控制算法原理
- 力模型构建
:基于力模型的控制算法将无人机之间以及无人机与障碍物之间的相互作用抽象为一种虚拟力。例如,在无人机之间构建吸引力和排斥力,使无人机既能保持编队的紧凑性,又能避免相互碰撞。对于障碍物,构建斥力,使无人机能够远离障碍物。这些虚拟力的大小和方向通常根据无人机之间的距离、相对速度以及无人机与障碍物的距离等因素来确定。例如,当两架无人机距离过近时,它们之间的排斥力增大,促使它们相互远离;当无人机靠近障碍物时,障碍物对无人机的斥力增大,引导无人机改变飞行方向。
- 控制算法实现
:根据构建的力模型,计算作用在每架无人机上的合力。然后,将合力转化为无人机的控制输入,如加速度、角速度等,通过调整这些控制输入来改变无人机的飞行姿态和速度,实现编队控制。例如,通过牛顿第二定律 F=ma(其中 F 为合力,m 为无人机质量,a 为加速度),根据计算得到的合力确定无人机的加速度,进而调整无人机的速度和位置。在实际应用中,还需要考虑无人机的动力学特性和控制延迟等因素,对控制算法进行优化,以确保无人机能够快速、稳定地响应控制指令,保持编队的稳定性。
⛳️ 运行结果

📣 部分代码
dt = 0.1; % step
sim_time = 70; % total time
N = 5; % drone number
d = 10; % desired distance
v_max = 3; % max_v
a_max = 2; % max_a
drone_radius = 0.25; % drone_radius
safe=1; % safe_distance
k_att = 0.1; % att
k_rep = 300; % rep
k_vel = 0.3; % cel
d0 = 10; % rep_dis
delay_steps = 0; % latency
history_length = 10; % history
%% init collision
collision_count = 0;
🔗 参考文献
🍅往期回顾扫扫下方二维码

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 2
2 0
0- 0



 已为社区贡献181条内容
已为社区贡献181条内容

所有评论(0)