光电对抗:无动力飞行器飞行特征及其对抗技术(上)
中国移动低空智联网体系下的eVTOL技术聚焦无动力飞行器特性与防御策略。无动力飞行器凭借"低慢小"特征难以侦测,需多源传感器融合的反制系统。数据传输呈现多样化趋势,从传统无线电到5G/卫星中继,同时发展抗干扰通信技术。未来发展方向包括AI自主决策、太阳能长航时、隐身材料应用等。防御需构建探测-识别-处置的体系化方案,结合软硬杀伤手段与空域管理。该研究为低空安防提供了技术参考框架

接入中国移动低空智联网体系的eVTOL
第一节:无动力飞行器飞行特征及其反侦察技术和发展趋势
一、无动力飞行器种类及技术特征
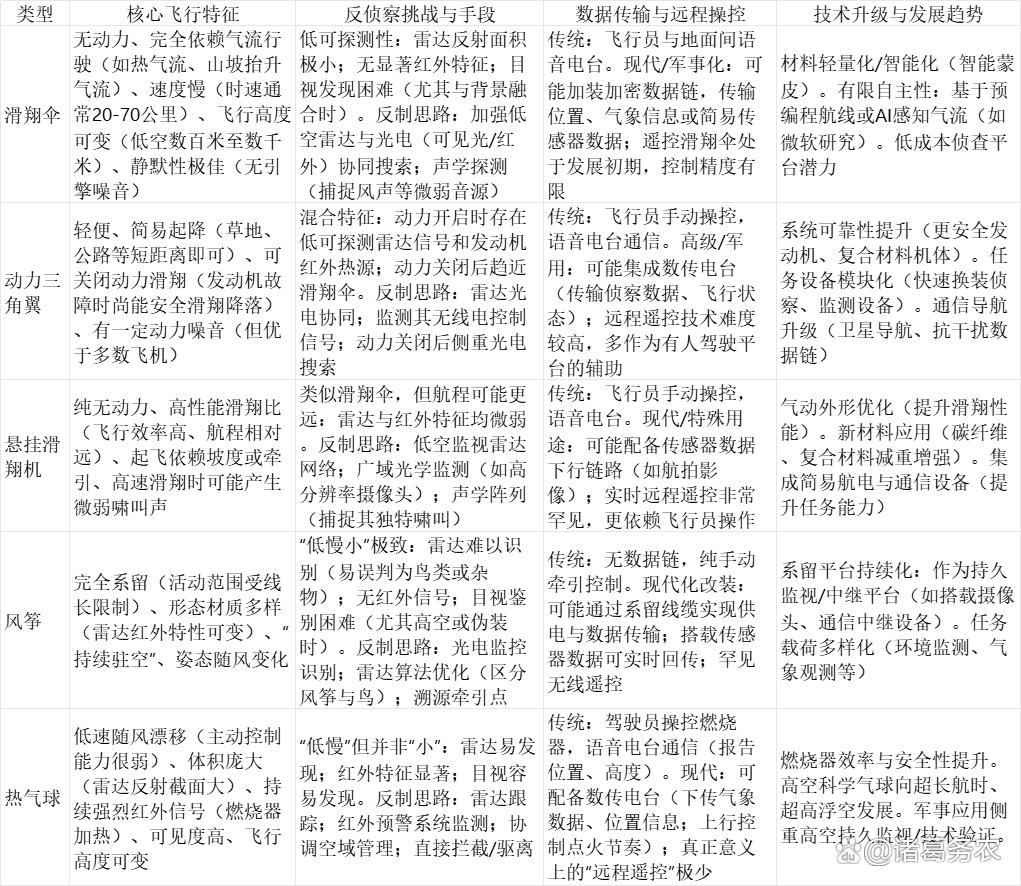
无动力飞行器种类及技术特征
二、无动力飞行器的反侦察技术要点
无动力飞行器之所以难以侦测,主要源于其“低慢小”(低空、慢速、小雷达反射面积)的共性特征,并高度依赖环境风力和热气流,其信号特征微弱(噪音低、无强射频信号),且外形和材料也利于“光学隐身”。
因此,反制这类目标,通常需要一个综合的“低空监视与防控系统”,其核心在于多源传感器融合(雷达、光电、无线电监测、声学等)和分层级的处置策略,技术细节可参考之前提供的信息。
新 AI 算法让滑翔机主动捕捉热气流
三、数据传输与远程操控
无动力飞行器在数据传输与远程操控方面普遍存在以下特点和发展趋势:
1. 数据链类型:
传统视距内无线电遥控:多数消费级或轻型航空器使用,易受干扰和截获。
超视距远程控制:通过4G/5G蜂窝网络或卫星中继实现,增加控制距离但依赖网络覆盖。
预编程自主飞行:依赖高精度导航系统(如GPS、北斗)和惯性导航系统(INS),缺乏实时交互。
2. 抗干扰与隐蔽通信:
跳频、扩频技术:抵抗窄带干扰。
定向数据链:如激光通信,难以被截获,但对准要求高。
离子风驱动无人机
低概率截获(LPI)通信:通过低功率、宽频带等方式隐藏信号。
延迟容忍/中断容忍网络:适应不稳定链路。
3. “远程操控”的局限性:
对于无动力飞行器,远程操控更多是辅助性的,例如调节热气球的燃烧器、控制滑翔伞的翼面或调整风筝的姿态,无法像多旋翼无人机那样进行灵活、高精度的机动控制。其飞行轨迹在很大程度上仍受自然气流支配。
无动力飞行装置和飞行侦查设备
四、技术升级与发展趋势
无动力飞行器未来可能会在以下几个方面持续演进:
1. 智能化与自主化:
环境感知与智能决策:利用AI技术(如机器学习、计算机视觉)实时感知风场、热气流,自主做出航路规划与决策,减少对人工操控的依赖,提升飞行效率和安全性。
集群协同:多架飞行器通过自组网通信共享信息、协同完成任务(如广域监视)。
2. 新能源与长航时:
太阳能:机翼表面敷设柔性太阳能电池板,为航电设备供电甚至辅助推进,实现超长航时(平流层太阳能无人机是极端例子)。
新型推进方式:如离子推进目前效率较低,但为未来无噪音推进提供了想象空间。
3. 隐身与生存能力:
先进材料:应用雷达吸波材料(RAM)、透波复合材料,进一步降低可探测性。
低信号特征:优化设计,降低声学、红外和视觉特征。
4. 集成与多功能化:
成为“空天地一体化”信息网络的节点,承担通信中继、侦察感知、环境监测等多重任务。

蝉形无人机
五、如何有效防御
有效防御这类目标没有“银弹”,需要体系化思维:
1. 综合探测系统:
融合低空雷达、光电、无线电侦测、声学等多种传感器,实现优势互补。
2. 智能识别与跟踪:
利用人工智能算法,对探测到的目标进行快速分类、识别和威胁判定,降低虚警率。
3. 分层分级处置:
软杀伤:无线电干扰压制(控制、导航、图传链路)、导航欺骗。
硬杀伤:高能激光、微波武器、传统动能武器(成本需考量)、捕捉网。
空域管理与法规:通过电子围栏(Geofencing)、飞行审批报备等手段,从源头上减少非法、违规飞行活动。
4. 训练与演练:
针对性的培训和实战演练,提升应对能力。

動力三角翼

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 30
30 0
0- 0



 已为社区贡献63条内容
已为社区贡献63条内容

所有评论(0)