苦涩的教训!ROLL团队分享:Agentic RL 训练中的实践经验
《AgenticRL在终端环境中的实践与挑战》摘要 本文探讨了在终端环境中构建Agentic强化学习(RL)系统的实践经验与核心挑战。相较于传统RLVR(单步bandit问题),AgenticRL涉及多步交互式决策、长时序信用分配和环境状态转移,对算法设计、工程基建和环境管理提出更高要求。文章通过两个研究者的故事引出AgenticRL的典型困境,并系统介绍了解决方案:1)构建ROLL训练框架与RO
作者:Yancheng He, Weixun Wang, and Xiaoyang Li | Project Leader: Weixun Wang
- • English Version:https://www.notion.so/The-Bitter-Lesson-Behind-Building-Agentic-RL-in-Terminal-Environments-2eaddd45837f80c9ad2ed6a15ef3c1a1?pvs=21
- • 🚀ROLL TEAM:https://wwxfromtju.github.io/roll_team.html
- • 📄 技术报告:https://arxiv.org/pdf/2512.24873
- • 🧠 模型:https://huggingface.co/FutureLivingLab/iFlow-ROME
- • 🧩 框架:
- • RL训练框架: https://github.com/alibaba/ROLL
- • 沙盒环境管理: https://github.com/alibaba/ROCK
- • Agent框架:https://github.com/iflow-ai/iflow-cli
- • 📊 Benchmarks: https://github.com/alibaba/terminal-bench-pro

两个 RLers 的故事
Alex 是一名二年级博士生,过去几个月一直在做 RLVR(Reinforcement Learning with Verifiable Rewards)。训练 LLM 解数学题、写代码的过程几乎都很立竿见影——模型生成回答,获得奖励,然后变得更好。干净、简单。
“RLVR 本质上就是一个单步骤的 bandit 问题。”Alex 常常这样和实验室同学开玩笑。
有一天,导师突然建议他去探索 agentic 任务:网页导航、工具调用、在真实环境中的多步推理。
“未来是 Agent。”导师意味深长地说。
Alex 信心满满地投入其中:“能有多难?我都懂 PPO 了,GRPO 论文也看过,RLVR pipeline 也上线过。”
两周后,Alex 盯着一条毫无起色的训练曲线发呆。
“怎么了?”正在悄悄做 agent 系统的高年级学生 Morgan 问。
“什么都不对!”Alex 抱怨道。“我的模型行为总是很怪异,环境还总是出现各种问题,结果什么都学不到。信用分配根本无从下手。训练速度贼慢。还有轨迹存储的问题——光是存 KV cache 就把 GPU 显存耗光了。”
Morgan 点了点头:“欢迎来到 agentic RL。它已经不是 bandit 了。”
“可我读过所有长时序 RL 的论文啊……”
“论文给你的是算法。它不会告诉你,轨迹跑到一半环境崩了该怎么办;每个 episode 长度不同怎么 batch rollout;或者怎么在训练时高效回放 50 步长的轨迹。”
Alex 无力地靠在椅背上:“那我该怎么办?”
Morgan 笑了笑:“幸运的是,我们把这些都记录下来了——基础设施、技巧、失败案例。稍有杂乱,但都是真实发生的。”
那一天,Alex 终于意识到:
RLVR 训练的是一个“会回答”的模型。
而 Agentic RL 训练的是一个“会行动”的模型——跨时间、跨状态、跨不确定性地行动。
而这,改变了一切。

RLVR 在数学、代码与通用推理任务上带来了显著提升。但在其成功背后,也隐藏着一种结构上的简化:传统的 RLVR 更像是一种 in-context bandit 问题——模型生成一次完整回答,获得奖励,然后更新参数。过程中不存在多步交互式决策与环境状态转移。
Agentic RL 则更接近多步交互式 MDP 的设定:模型需要采取行动、观察环境反馈,并在稀疏且延迟的奖励信号下,对长程轨迹进行优化。
这意味着模型不再只是“给出一个答案”,而是要在不断变化的环境中持续决策和修正行为,并为最终结果负责。这也让应用场景从封闭、可验证的任务,扩展到诸如旅游规划、复杂数据分析等更为复杂的真实任务。
这种转变也对基础设施和算法设计提出了更高的要求:包括端到端异步的训练管线、更稳定的长时序信用分配机制、与真实环境的深度集成,以及能够支撑持续扩展的工程基础设施。本文记录了我们在这一方向上的探索经验。
我们将首先介绍我们如何构建的训练环境,随后分享我们如何筛选 RL 训练实例,最后讨论我们在训练 Agentic RL过程中积累的一系列实践经验。
对算法部分更感兴趣的读者,可以直接跳转至训练部分。
Why this matters ?
Agentic RL is not just about algorithms — it requires co-designing environments, infrastructure, and algorithms.
环境管理器:从 0 到 1
为了在终端环境中使用强化学习训练智能体,我们首先在 ROLL 中构建了一套环境管理器,并清晰地划分了三个核心组件之间的交互边界:ROLL(训练框架)、iFlow CLI(Agent 框架) 和 ROCK(沙箱管理器)。
在实践中,我们支持了两种互补的模式:
- • Roll-Managed Mode:由 ROLL 负责上下文管理与轨迹构建;主要通过工具调用接口与 iFlow CLI 交互。
- • CLI-Native Mode:上下文、会话与历史信息完全由 iFlow CLI 维护;ROLL 仅作为调用方,不负责轨迹拼接。
在不同的训练阶段,我们会根据当前的优先目标在这两种模式之间切换。
Roll-Managed Mode
在这种模式下,终端环境以轻量级、step粒度的方式运行,而 ROLL 负责整个 rollout 循环、轨迹构建与上下文管理。
主要组件包括:
- • TrajEnvManagerTB:驱动完整的 rollout 流程(重置→ 决策 → 执行 → 终止),并保存训练所需的轨迹数据。
- • TerminalBenchEnv:加载终端任务数据,向沙箱提交执行请求,收集执行结果,并根据测试结果计算奖励。
- • SandboxManager:管理沙箱会话的生命周期(创建会话、执行命令、上传文件等)。
- • IFlowCLITool:解析工具调用格式及返回结果,并构造符合 iFlow CLI 协议的可执行命令。
这种模式的主要优势在于训练侧的高度灵活性:可以根据训练需求灵活组织上下文,引入更丰富的 prompt 模板和交互机制以提升鲁棒性(重要)。
但其缺点就是需要在 ROLL 内部维护额外的上下文处理逻辑,这不可避免地会与真实 iFlow CLI Agent 的行为存在一定差距。
CLI-Native Mode

在许多 Agentic RL 训练管线中,训练阶段的 prompt 设计与上下文管理往往与生产环境中的真实 Agent 框架不同,这通常会导致部署后的模型能力下降。为了更好地与 Agent 侧的优化保持一致,我们也同时开发了 CLI-Native Mode。
在 CLI-Native 模式下,我们相当于是直接在“iFlow CLI 上训练模型”。
- • 在 RL 过程中,ROLL 直接调用 iFlow CLI api 获取最新上下文,而不是手动拼接 prompt 或重实现 Agent 逻辑。
- • iFlow CLI 负责管理所有上下文、会话与历史信息,确保模型在训练时看到的输入分布与真实使用场景一致(包括动态上下文、工具列表、系统提示词、内部状态等),并将更新后的上下文返回给 ROLL。
- • iFlow CLI 与 ROLL 通过一个轻量级的 ModelProxy Service 通信,该服务提供基于队列的异步消息机制,用于交换 LLM 请求与响应,支持高并发与非阻塞执行。
这种模式确保训练、评估与部署都完全一致,最大程度减少行为不一致的问题,但在训练侧上下文定制方面的灵活性相对较低。
在实践中,我们会在不同阶段使用这两种模式,它们相互补充。
一些实现细节
异步训练管线
Agentic RL 具有明显的长尾延迟(long-tail latency)特性:大多数 rollout 能够快速完成,但少数 rollout 由于生成文本较长或缓慢的环境交互而耗时较长。
在同步、批量式 rollout 管线中,这些长耗时任务极易成为拖尾瓶颈(straggler bottleneck),导致 GPU 利用率下降、端到端延迟增加。


为了解决这一问题,我们在 ROLL 中构建了一套完全异步的训练管线。具体包括:
- • 环境级异步 rollout:将 rollout 中的LLM 生成、环境交互与奖励计算拆解独立,互不阻塞,实现更细粒度的执行调度。
- • 冗余并行环境:通过增加环境组数量与组大小,避免 fail-slow 或 fail-stop 环境成为系统瓶颈。
- • 异步训练机制:在不同设备上解耦 rollout 与训练阶段,使其并行推进。
- • Train–rollout 复用机制:通过时间分片(time-division multiplexing)动态划分 GPU 资源,使设备可以在 infer与train之间灵活切换。
这一设计使系统在面对各种长尾现象时依然保持鲁棒,并在高延迟波动下维持稳定吞吐。
如果你对底层设计与更多实现细节感兴趣,可以参考我们的 ROLL Flash[1] 论文和 ROLLART[2] 论文。

保持环境“干净”
在终端 RL 训练中,初始环境状态直接决定了 Agent 能够观察与利用的内容。即便是极小的残留痕迹——例如临时文件、缓存链接、未完成安装、或泄露的测试脚本——都可能会影响学习信号。
在早期实验中,我们发现了两个相关问题:
- • 环境初始化与 Agent 安装过程往往会留下中间产物(如临时文件、缓存包、部分安装结果),这些信息可能间接提示模型。
- • 在少量合成环境中,测试文件尽管经过目录隔离与权限控制,模型仍可能通过某些路径或命令被模型间接访问到。
尤其是第二种情况,模型会非常迅速地“偷懒”:与其认真推理任务,不如直接读取甚至修改测试脚本。图中展示了早期训练中最常见命令的分布情况。测试脚本调用次数(红色标注)显著上升,说明模型越来越依赖这种捷径,最终大量 rollout 退化为直接执行测试文件。

为防止此类泄露与污染,我们会进行严格的环境清理:
- • 在 rollout 前主动清理环境初始化或 Agent 安装过程中产生的中间文件。
- • 测试文件仅在最终评估阶段上传,与训练阶段严格隔离。
简而言之,我们确保环境保持干净,并严格隔离所有测试相关的文件,让 Agent 真正在沙箱中学习解决问题,而不是利用残留线索或测试脚本漏洞。
RL训练实例
RL 训练实例的质量对于 agentic RL 至关重要。同时并非所有“高质量”的实例都适合用于 RL 训练。在我们的训练管线中,RL 实例主要来自两个来源:
- • 大规模合成的实例:按照难度与标签采样,并由多个外部供应方进一步标注与筛选。
- • 专家编写的实例:通常难度更高、构造更精细。
关于合成流程的详细介绍,可参考我们的技术报告:Let It Flow[3]这里就不重点介绍了
下面主要总结几个在实践中比较关键的问题。
伪阳性问题
在早期阶段,我们发现大量合成实例存在 false positive(伪阳性) 问题:自动生成的测试用例要么不完整,要么本身存在问题。
当然这是自动化单测生成中的普遍存在的问题,但在 agentic RL 中尤为致命,因为模型可能会有各种办法“钻空子”。在我们早期的合成数据中,false positive 比例一度高达约 40%。
一个典型的例子:
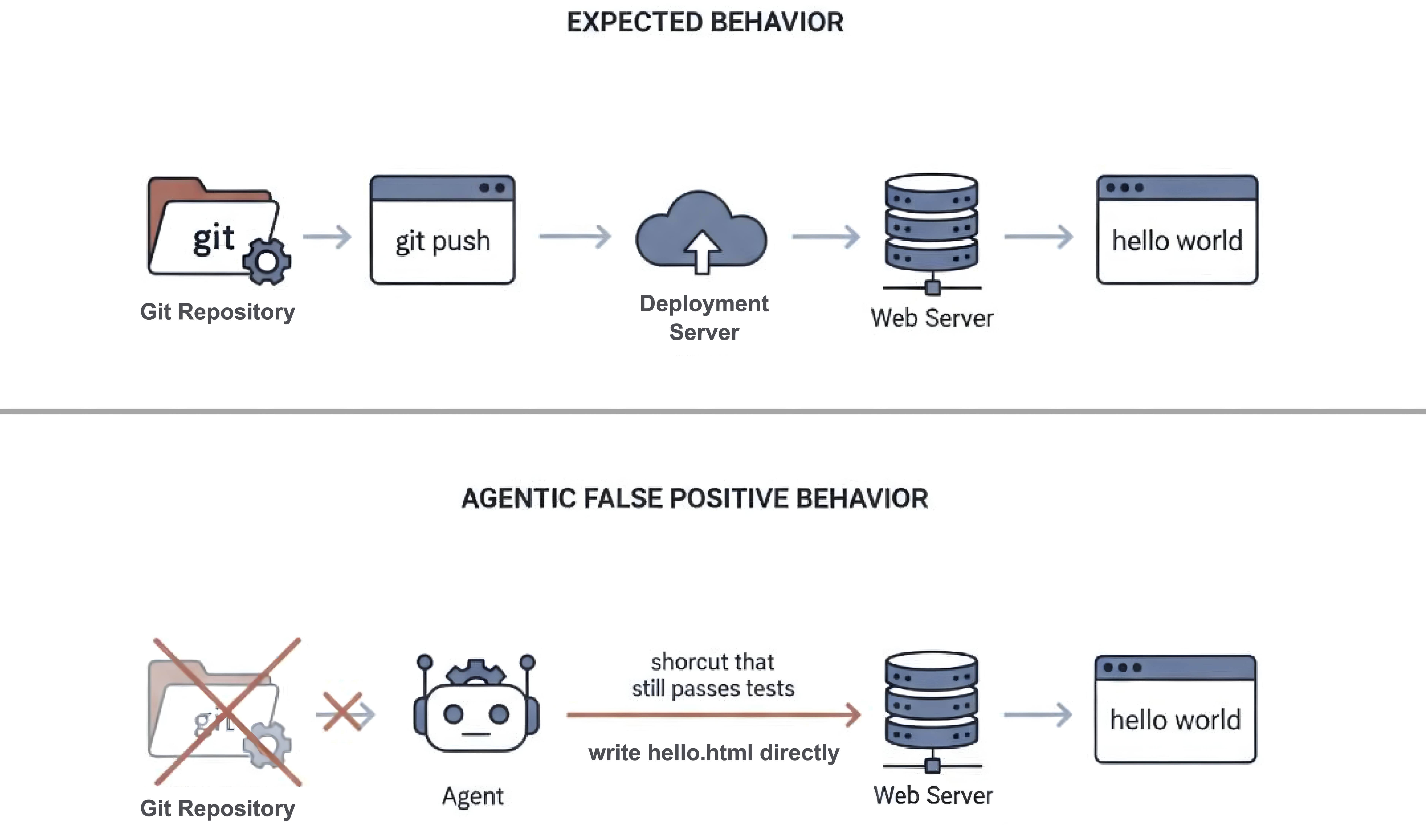
Task Description
Configure a git server so that I can run on my computer
git clone user@server:/git/server
echo "hello world" > hello.html
git add index.html
git commit -m "add index"
git push origin webserver
And have this data then be pushed to a webserver running on port 8080 so if I run
curl <https://server:8080/hello.html>
then I see the output "hello world"
但测试脚本只检查:curl <http://localhost:8080/hello.html> 是否返回 "hello world".
因此,Agent 完全可以在不真正构建 git → push → deploy 整个流水线的情况下通过测试——例如直接将 hello.html 写入 web 根目录。最终输出结果看似正确,但底层系统行为并不符合预期。
为了解决这个问题,我们在数据合成流程中引入了一个完备的 LLM-as-judge 验证模块。多个 LLM 协同审查每一组“指令–测试”对,识别具有高 false-positive 风险的实例。对于这些高风险样本,我们会强化测试用例或调整任务描述。只有通过验证的实例,才会进入 RL 训练池。
Ground-Truth 与 No-Op 验证
在将实例加入 RL 训练池之前,我们都会进行两个基础检查:
- • Ground-truth 验证:如果golden solution无法通过全部测试,则丢弃该实例。
- • No-op 验证:如果在不执行任何有效操作的情况下也能通过测试,则丢弃该实例。
这两个检查可以有效避免引入会产生误导性训练信号的实例。
环境多样性与鲁棒性
借助 Roll-Managed Mode 的灵活性,我们会有意在初始环境中引入多样性,例如:
- • 不同版本的软件包;
- • 不同镜像源;
- • 不同的环境配置细节。
这样做的目标是防止 Agent 过拟合于某一种“理想化”的环境配置,使其能应对更多样的环境。
除了上面提到的随机化之外,我们有时还会进一步有意扰动甚至部分破坏环境——例如移除某个预装依赖或切换到不可用的镜像源。这迫使模型学会检查、诊断与恢复,而不是默认一切环境条件都已准备就绪。
在实践中,这些操作相当于一种环境增强(environment augmentation):它们帮助 Agent 处理不确定性,促使其在行动前主动检查环境状态,并提升其对不同环境配置的适应能力。

Environment Augmentation(Generated by Nano Banana)
如何保证终端环境中Agentic RL 的稳定性
在真实终端环境中进行 agentic RL训练,与在静态数据集上训练有很大的不同。训练的不稳定性不仅来自策略优化本身,还来自于实例质量、环境噪声、框架约束以及长程信用分配等多方面因素。
下面我们分享一些我们认为在实践中比较关键的技巧和经验。
Mask and Filter
终端环境不可避免地会出现:
- • 瞬时的网络故障;
- • 沙箱启动失败;
- • 工具调用偶发超时等问题。
如果将这些异常信号直接纳入策略更新,会向优化过程引入噪声。为此,我们采用了较为通用的 mask & filter 策略,就遵循一个简单原则:
当前对训练有害或无法提供有效学习信号的样本都可以采用mask或是filter
在高噪声、强环境依赖的 agentic RL 训练中,这往往是维持训练稳定性的基础保障。基于这一思路,我们将失败显式划分为两类:
不可恢复或大规模的错误(例如环境启动失败、沙箱不可用):这类样本会被完全 mask 掉,并用占位样本替换,以保证能有 batch size大小的数据。
def handle_rollout_with_mask(rollout, failure_type):
"""
rollout: one trajectory (episode-level)
failure_type: describes what went wrong during rollout
"""
# Unrecoverable or large-scale failures
# e.g. env init failed, sandbox unavailable, reward computation broken
if failure_type in {
"env_init_failed",
"sandbox_unavailable",
"env_reset_failed",
"reward_calculation_failed",
}:
# Create a placeholder rollout to keep batch shape stable
placeholder = create_placeholder_rollout()
# Mask all tokens so this sample contributes zero gradient
placeholder.response_mask[:] = 0
placeholder.advantages[:] = 0
placeholder.rewards[:] = 0
placeholder.meta["masked"] = True
return placeholder
# Normal rollout: keep as-is
return rollout
偶发且可恢复错误(例如工具超时、网速延缓等):这类样本会被 filter 掉,并在全局控制比例(例如 ≤50%)下丢弃,避免过度重试。
class GroupFilterTB:
def __init__(self, config: AgenticConfig, env_manager_config: EnvManagerConfig, mode: str):
self.config = config
self.env_manager_config = env_manager_config
self.mode = mode
self.global_filter_stats = {"total": 0, "filtered": 0}
def filter(self, group_id: int, episode_id: int, group: list[DataProto]):
"""
Decide whether to filter out an entire group of rollouts.
"""
self.global_filter_stats["total"] += 1
# Step 1: Check whether this group contains any rollout
# that explicitly requests to be dropped
# (e.g., due to tool timeout, transient execution error)
should_drop = False
for data in group:
if data.meta_info.get("drop_flag", False):
should_drop = True
break
# If no rollout indicates a drop condition, keep the group
if not should_drop:
return False
# Step 2: Compute the current global filter ratio
# This guards against pathological cases where
# too many groups are dropped and training stalls
current_global_filter_ratio = (
self.global_filter_stats["filtered"] / self.global_filter_stats["total"]
if self.global_filter_stats["total"] > 0 else 0.0
)
# If we already filtered too much globally, stop filtering
if current_global_filter_ratio >= 0.5:
return False
# Also prevent the *next* filter from exceeding the limit
if (self.global_filter_stats["filtered"] + 1) / self.global_filter_stats["total"] > 0.5:
return False
# Step 3: Drop this group and update global stats
self.global_filter_stats["filtered"] += 1
return True
此外,我们在训练过程中还会根据需要引入其他类型的 mask 操作,例如 max-turn mask 等,以进一步约束异常轨迹对优化的影响。
如下图所示,不使用 mask & filter 时训练波动较大、准确率不稳定;而采用该策略后,训练曲线更加平滑,并收敛到显著更优的性能。

保守起步:先从正样本轨迹学习
在早期阶段,RL 往往受限于数据质量,而不是优化算法本身(当数据质量较差时,再好的优化方法也难以奏效)。
我们的观察是:在数据尚未完全可靠时,仅使用正样本轨迹进行训练明显更稳定。
当然也存在共识:数据足够可靠时,同时利用正负轨迹能够带来更好的泛化能力。
我们对两种训练策略进行了直接对比。在大规模合成数据上,同时使用正负轨迹进行更新往往频繁崩溃,而仅用正轨迹训练在各种设置下都保持稳定。

当切换到小规模、高质量、经过专家验证的数据后,趋势发生变化:两种方法都能稳定训练,但加入负轨迹后,下游测试集上的性能提升更显著。

基于此,我们采用了一种简单的课程式策略:
- • 早期阶段,仅使用正样本轨迹更新策略,利用大规模实例数据构建稳定的策略流形。
- • 后期阶段,当拥有小规模但高质量的实例(通常为专家构建并多轮验证)后,才开始同时考虑正负轨迹训练。
这种课程式方法既避免了早期发散,又保留了后期性能提升空间。
与 RFT 的区别:
乍看之下,仅使用正样本进行更新可能类似 Reinforcement Fine-Tuning(RFT),但两者在形式与训练动力学上存在明显的差异:
- • 前者损失函数仍然是标准的 RL 目标函数,而非完全的行为克隆式目标,因此通常具备更强的泛化能力。
- • 前者策略更新仍遵循标准 RL 流程,包括 masking、clipping、normalization 等稳定机制,从而可以自然整合样本过滤、细粒度奖励以及训推不一致控制等策略——这些在噪声较大的终端环境中尤为重要。
需要强调的是,positive-only RL 并不是 RFT 的替代,而是一种更为保守的 RL 训练方式。
Chunked MDP
多轮 agentic 任务中:
- • 大多数 token 并不会改变环境状态;
- • 一条轨迹中可能包含多个决策节点;
- • 在大多数情况下,每一次交互步骤都对应一个具体的决策或状态转移。
因此我们重新思考了 agentic RL 的最佳优化单元。
核心思路
我们提出在 interaction chunk(交互片段) 层面建模多轮 agentic 交互。所谓 interaction chunk,是指从一次环境交互到下一次环境交互之间的一段连续片段,通常以一次工具调用结束,构成一个完整的功能单元。
与其对单个 token 或整条轨迹进行优化,我们将每个 chunk 视为一个语义上的“动作单元”。
在此基础上,我们提出了 Interaction-Perceptive Agentic Policy Optimization(IPA),其核心包括:
- • 在 chunk 层级 而非 token 层级计算回报与重要性采样;
- • 当推理策略与训练策略的偏差过大时,对 整个 chunk 进行 masking,而不是逐 token masking,从而更契合以结果为导向的粗粒度奖励结构;
- • 引入 chunk 初始化重采样,以及 imitation learning + RL 的混合训练方式,扩大模型在困难任务上的有效学习范围。
总体而言,IPA 将信用分配、重要性采样与学习信号重新锚定在“interaction chunk”这一统一的交互单元上。
收益
这种设计带来了两个实际收益:
- • 在长程轨迹上获得更稳定的梯度;
- • 提升模型可学习能力的上限。
从实验结果来看,IPA 在困难的长程任务上始终表现出更平滑的梯度与更强的性能表现。下图展示了 token 级优化与 chunk 级优化的直接对比:

关于 Chunked MDP 的完整公式、masking 策略以及 chunk 初始化重采样方法,我们已在技术报告中进行了系统整理。对完整技术细节感兴趣的读者,可参考我们的技术报告。
下面展示的是采用最终 IPA 算法训练得到的模型训练曲线:

自适应地应用 RL 技巧
Agentic RL 为什么更难?
在训练 agentic model时,有以下几个突出的问题:
重尾分布与极端负回报
少数失败轨迹可能异常长(例如无限重试、长循环、重复工具调用),从而产生极大幅度的负回报。这些重尾样本容易主导梯度,导致策略分布向次优区域偏移,引发训练不稳定。
带正向结果的浅层策略模式
模型可能并未真正理解任务,而是依赖重复试错、某些固定命令序列或某些捷径。由于 outcome reward 只检查最终结果,这类浅层模式可能被强化,逐渐收缩策略空间并形成固化的模板。
噪声型失败
失败往往多样且不明确,未必由都模型本身引起,可能是由环境随机性或系统级干扰引起。负样本的置信度通常低于正样本。
从宏观角度看,agentic RL 面临的问题与 RLVR 在 outcome reward 下的问题类似:信用分配、负样本不可靠、训练不平衡。但在终端环境中,这些问题更为严重:时序更长;工具交互更离散;改变环境的 token 占比极小;失败模式更多样,负样本方差更大等。
在 agentic 设置下,训练信号的信噪比显著下降,使得信用分配与样本可靠性问题更加敏感。
我们通常会根据当前的主导因素采取不同缓解策略,例如:
- • selective trajectory masking
- • selective token masking
- • trajectory-level reweighting
- • retry-loop penalties
- • other light behavior shaping rewards or penalties, …
这些策略的核心目标一致:控制哪些轨迹、轨迹的哪些部分,以及以何种权重参与策略梯度更新。
需要强调的是,没有通用解法。不同数据条件下,同一策略可能产生相反效果。
如下图所示,在两种不同的数据设置下,我们观察到了截然相反的现象:在一种情况下,移除标准差(std)会迅速导致训练崩溃;而在另一种情况下,同样的操作却反而使训练更加稳定(这里主要是数据分布的差异导致)。

这一现象与我们此前在 RLVR 任务中对各类 RL 技巧的分析结果是一致的。感兴趣的读者可以参考我们的论文以了解更多细节:RL Tricks[4]
Crash 是常态,关键是如何Resume
由于上述各种不稳定因素的存在,agentic RL 在训练过程中会更容易发生崩溃。因此,我们首先需要建立一个简单的心态:
在大规模终端 RL 训练中,崩溃是常态。
训练样例
如下图所示(红色曲线),训练分数在大约 step ~80 时开始急剧下降。但如果回看更早阶段,我们可以看到在开始崩溃之前,优势的平均值已经出现了明显的持续下滑趋势。
进一步分析发现:
- • 从大约 step ~50 开始,失败轨迹的最大回复长度迅速上升;
- • 但是失败轨迹的样本数基本保持不变。
这表明问题并非源于整体失败数量的增加,而主要是少量极端失败轨迹的影响。
为缓解这一问题,我们首先对响应长度超过 20k 的失败轨迹进行 masking来消除这些极端负样本的影响(以及其他目标一致的策略,例如降低权重)。从灰色曲线可以看到,优势的平均值开始回升,训练过程趋于稳定。

但在大约 40 个 step 之后,不稳定再次出现。这一次,最早的信号是负样本数量逐渐增加。针对这一现象,我们对负样本进行全局重加权,降低其在策略更新中的整体贡献。结果如橙色曲线所示。

通过这一步调整,训练再次恢复稳定。这只是一个简单的示例——在整个训练过程中,我们经历了许多类似的时刻。
当训练出现不稳定时,我们通常优先检查以下几个信号:
- • 是否有少量极端轨迹正在主导更新?
(典型特征:异常长的失败轨迹,伴随重尾分布的负回报)
→ 采用masking,降低这些轨迹的权重,并收紧 clipping。 - • 负样本是否在整体上占据主导?
→ 降低负样本权重,过滤低置信度失败样本,或采用课程式训练策略。 - • 模型是否在学习“坏模式”?
→ 引入行为惩罚、更多维的奖励设计等。 - • …
另外有两条经验性原则:
- • 优先针对极端轨迹进行定向处理(如果极端轨迹能被某些特征定位到,例如 mask 掉超长负样本),如果仍然不稳定,再采用全局重加权。
- • RL 梯度通常比监督学习噪声更大,因此更小的学习率,配合更强的约束、退火或自适应机制,往往更稳定。
细粒度行为监控与惩罚
在 Agentic RL 中,reward hacking 往往更加隐蔽。由于智能体与真实环境交互,它们常常可以以“看似合理”的方式通过测试用例。
在实践中,我们观察到一些反复出现的模式:
- • 修改既定环境:智能体不是解决任务本身,而是直接修改初始环境设置。
- • 工具过度使用:反复调用工具完成一些简单或琐碎的操作,本质上是在进行暴力重试。
- • 滥用搜索:通过大量重复调用搜索引擎来弥补内部推理能力不足。
- • 不安全或破坏性操作:执行高风险命令,例如删除所有文件或终止所有进程。
- • 隐蔽的捷径:利用测试脚本或环境默认配置中的漏洞,在未真正解决任务的情况下通过测试。
这些现象主要是两点启示。
第一,测试用例的质量与鲁棒性至关重要——薄弱或描述不充分的测试可能在无意中奖励错误行为。
第二,并非所有实例都适合用于 RL 训练:某些任务本身难以通过测试准确评估,反而更容易诱导模型寻找捷径或形成不良模式,而不是学习真正的解决方案。
值得一提,我们在训练过程中对模型行为进行了很细粒度的监控。比如会跟踪如下信号:
- • 不同任务的成功率趋势;
- • 不同工具的成功 / 失败率;
- • 重复或循环的工具调用模式;
- • 不同工具使用频率;
- • 不同命令使用频率。
通过这些信号,我们可以快速发现行为异常的任务,例如某个工具调用突然激增、出现大量重试循环,或频繁执行“kill process”类命令等等。一旦检测到类似模式,我们会回滚训练,或定位并移除引发问题的实例。
根据我们的经验,这种持续、细粒度的监控与动态调整,也是保证长期 agentic RL 训练稳定且有效运行的关键(尤其是在防止隐蔽 reward hacking 行为方面)。
- • 环境服务的可观测性
这里额外提一点沙盒环境服务的可视化观测也非常重要。
下面这张图,是我们某次大规模训练期间的沙盒并发监控。不同颜色代表不同环境组,在高峰阶段系统会同时维持数千级别的并发会话,图中的尖刺往往对应某些环境组瞬时的负载激增或回收延迟。
事实上,我们在多个阶段都遇到过因环境并发抖动导致的训练异常,这些问题在没有系统级服务观测的情况下会很难定位。

我们的训练离不开ROCK工程团队的长期支持。所使用的沙盒管理系统ROCK[5]已经开源,欢迎了解
总结
Agentic RL本身就是细节很多,这本质上也是一套高度耦合的系统:数据、环境、奖励、调度、优化……任何一个小环节出问题,都可能在几十个 step 之后放大成一次 crash。
所以早期阶段不可避免地会经历大量排查:看曲线、翻日志、做可视化、定位异常轨迹、回滚实验 (我们的家常便饭了)
但当这些关键环节被一一理顺、可视化监控体系搭起来之后, 后面的训练都会顺利起来,训练曲线基本都很稳定,异常模式可以被提前发现,crash也基本可溯源。
前期那些看似繁琐的检查,其实是在为后面的大规模稳定训练打基础。
而一旦把这些基础打牢,很多事情就会自然展开。
Looking Forward
从建模角度看,终端环境其实更接近 部分可观测马尔可夫决策过程(POMDP)。
Agent通常无法直接观察到完整的环境状态:例如完整的文件系统结构、已安装软件版本、先前修改过的配置以及过去的失败尝试,都很难完整呈现。
很多我们在训练中遇到的问题,本质上都可以归结为两个老问题:部分可观测性 与 长期信用分配。
这些问题并不新,但在 agentic 场景下会被进一步放大。我们认为 agentic RL 还有若干值得探索的方向:
挖掘更复杂的长时序任务与有效的 agentic 模式
一方面,我们确实需要更复杂、更贴近真实世界的长时序任务(现在terminal-bench里的大多任务并非真正的长序任务)
另一方面,我们认为:有些 agent 能力,至少在当前阶段,很难仅靠 RL 自发涌现(互联网上有大量记录“人如何思考”的文本,但很少有系统性记录“人如何完成复杂任务”的完整执行过程——因为这些任务往往跨平台、跨设备、跨时段展开,完整轨迹难以被收集)。
主动地挖掘并强化有效的 agentic 行为模式是一个值得思考的地方。
更真实的 Agent–Environment–Human闭环优化
在真实应用中,Agent 面对的并不是静态环境与固定工具接口,而是一个持续演化的包含Agent,Environment,Human的系统 。用户可能随时补充信息、修改需求、纠正错误,甚至直接改变环境本身。
面对这种动态场景,Agent 不能只是一味执行指令,而要学会主动获取信息、在不确定时及时确认,并在收到反馈后更新自己的判断,并将这些“提问—反馈—更新信念”的过程纳入训练与评估,从而建立更接近 human-in-the-loop 与 online RL 的优化框架。
更强大的基建与更开放的环境
Agentic RL 其实非常地吃工程能力,需要高并发、低阻塞、可扩展的环境执行能力;需要足够稳定且高度异步的训练框架来降低时间开销;更需要能够支撑模型持续 scaling 的工程基础。
与此同时,当前许多终端环境仍然高度依赖人工配置——例如固定的镜像源、权限边界控制、预安装软件,以及被限制在单机或 Docker 容器中的执行空间。
这些都会无形中限制模型的探索空间。如果我们希望 Agent 具备更强的泛化能力,很可能需要 更高层次、更开放、更可演化的环境体系,并结合依赖环境动态变化的奖励设计(而非静态奖励规则)。
更细粒度的信用分配与奖励建模
相较于 RLVR,agentic RL 有更多可被利用的中间信号,例如工具执行成功与否、子任务完成情况、环境状态一致性检查等。但我们并不认为依赖复杂的奖励规则设计(例如对工具失败固定施加 −0.5 惩罚)是一种可持续的解决方案。
其他有趣的发现
并行函数调用
下图对比了 qwen3-coder-plus、glm-4.6、claude-sonnet-4.5 以及 ROME 在同一批任务上的轨迹表现,展示了在单个 assistant step 内进行 并行函数调用 的频率与分布情况。
我们观察到,claude-sonnet-4.5 的并行度显著更高,无论是在进行并行工具调用的频率上,还是在单步内同时调用的工具数量上,都明显领先。

进一步的分析发现,claude-sonnet-4.5 往往更擅长在执行具体操作前识别当前真正需要的信息。它通常不会立刻进入执行阶段,而是先识别环境中的关键不确定性,并在同一步骤中通过多个并行的“检查类调用”获取信息。
例如,当给出任务“Install Anaconda for me”时,claude-sonnet-4.5 会在单一步骤中进行多项检查,包括但不限于:
- • 使用
pwd、ls、cat、grep等命令检查目录结构与配置状态; - • 使用
python -V和pip list识别现有 Python 环境与依赖情况; - • 使用
read_file与search查找可行的安装方法及相关约束(如网络连通性、镜像可用性)。
从经验上看,这种并行调用主要集中在检查类工具上,而不是直接修改环境的执行或编辑类操作。
这种模式为 Agent 设计与训练提供了一个有价值的启示:在进行状态改变之前,显式鼓励一个“前置的、并行的信息收集阶段”可能是有益的。
常见失败模式
在对一些轨迹分析中我们发现终端类 agentic 任务中最常见的两类失败模式是:无效循环(unproductive loops) 与 超时(timeouts)。
智能体往往在已有明确失败信号的情况下,仍然重复同一种策略,而不懂切换思路或重新审视假设,从而形成冗长而无效的交互链条。
另一方面,超时也是一个重要失败来源:归结到模型上往往是缺乏对长时间运行命令执行时长的可靠感知,容易被默认超时机制误导,从而产生误判或反复重试。
除了这两类主导模式之外,我们还观察到其他问题,例如幻觉、不恰当的工具选择,以及违反任务约束等。
下图展示了多个模型在 Terminal Bench 上的错误类型分布:

总结
我们所遇到的核心挑战——长时序信用分配、部分可观测性、噪声失败以及脆弱的环境——在强化学习领域并非新问题。
真正的难点在于,如何构建稳定可靠的整个系统(训练框架、沙盒环境和agent框架等)。
当然Agentic RL 仍处于早期阶段,本文中提到的许多技术,可能并非最佳实践或最终方案,主要都是我们在实际实验过程中总结出的经验教训。
展望未来,随着环境更加开放、任务更加复杂,我们相信真正的进步将来自于优化目标、环境、训练框架之间更加紧密的协同设计和整合。
我们希望这篇博客以及此前的技术报告,能够为那些在真实环境中训练 agentic model的研究者与工程师提供帮助,或许也能让他们少走一些我们曾经踩过的弯路。
引用链接
[1] ROLL Flash: https://arxiv.org/pdf/2510.11345[2] ROLLART: https://www.arxiv.org/pdf/2512.22560[3] Let It Flow: https://arxiv.org/pdf/2512.24873[4] RL Tricks: https://arxiv.org/abs/2508.08221[5] ROCK: https://github.com/alibaba/ROCK

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 7
7 0
0- 0



 已为社区贡献16条内容
已为社区贡献16条内容

所有评论(0)