如何使用instax5全景相机配合轨迹文件完成带空间位置的倾斜模型与3D高斯三维重建
0.序
无人机拍摄照片做倾斜摄影、3D高斯都已有成熟的方案。无人机需要专业的设备,要求高,携带不方便,不适合个人玩乐。
市面上有Remy一类软件可以用手机拍个视频完成三维重建,对拍照要求也相对比较高,又是环绕又是距离渐进。
而全景相机可以解决拍照的专业性问题,携带方便。
之前也探究过基于全景相机进行建模,涉及多角度切图,pos设定,但建模成功概率非常低。最近在研究3D高斯时发现知天下、MipMap都能直接基于全景相机进行建模,只是没有pos,导致比例尺不对,位置不对,而pos问题我相对是比较是擅长解决的。
本文核心是通过AI写了一个照片文件转CSV的网页工具,把两步路记录的轨迹和IntstaX5拍摄的视频整合后给到MipMap完成带空间信息的三维重建。通过截图的形式记录了详细的步骤,照着做一定可以得到结果
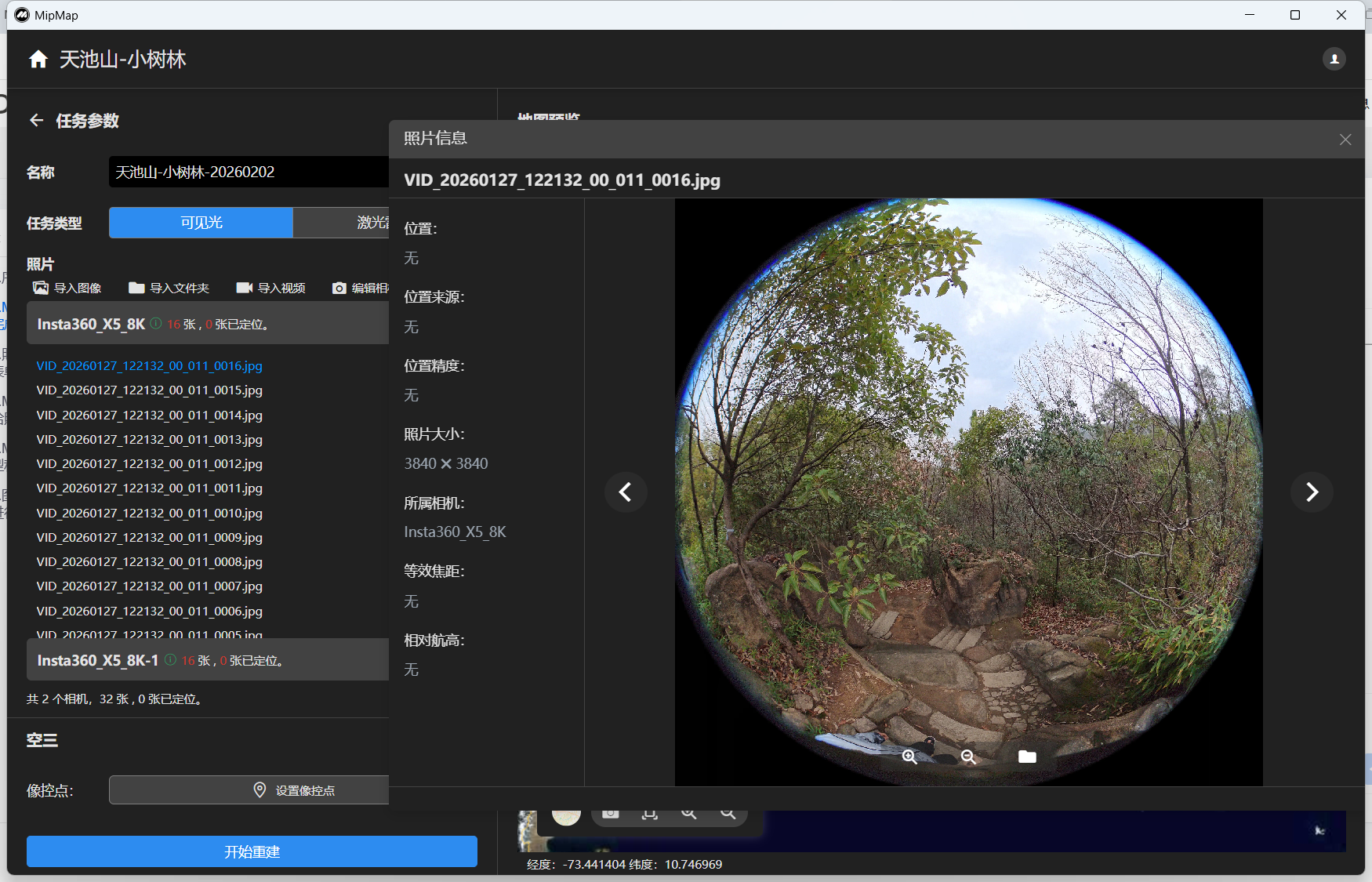
1.MipMap导入instaX5拍摄的8k视频完成抽帧
前置条件:
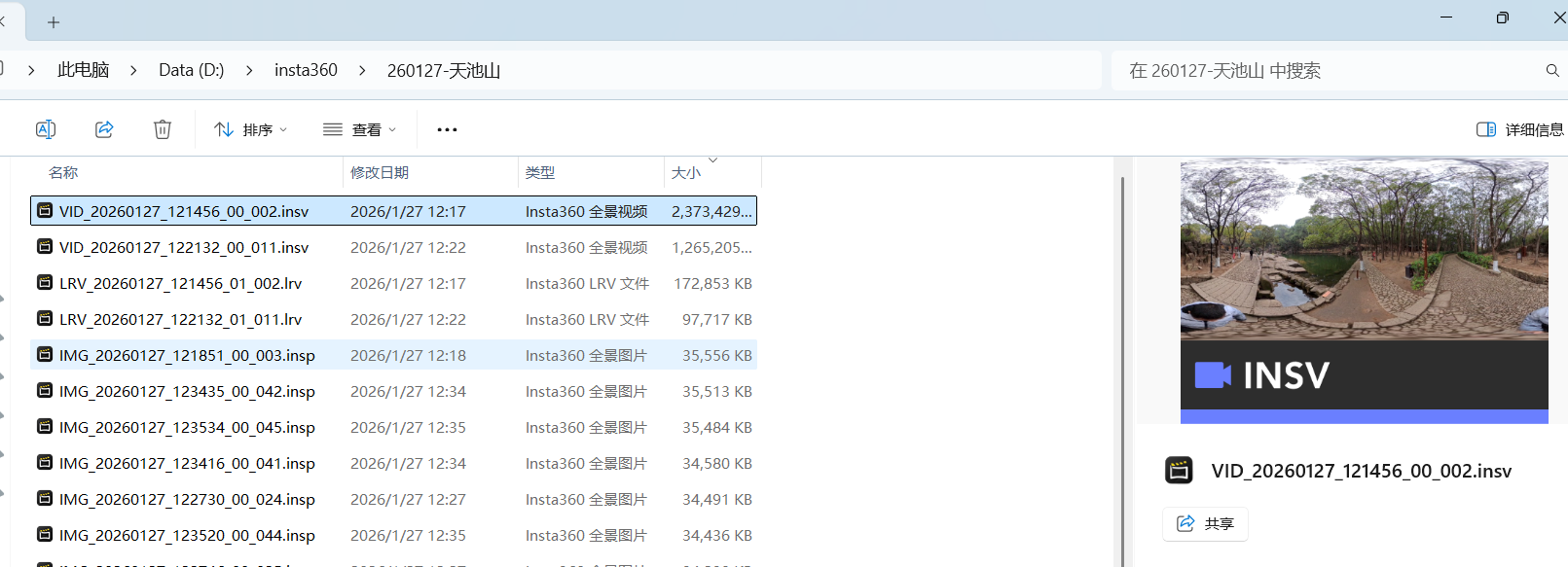
a.有InstaX5拍摄的8k视频,格式insv
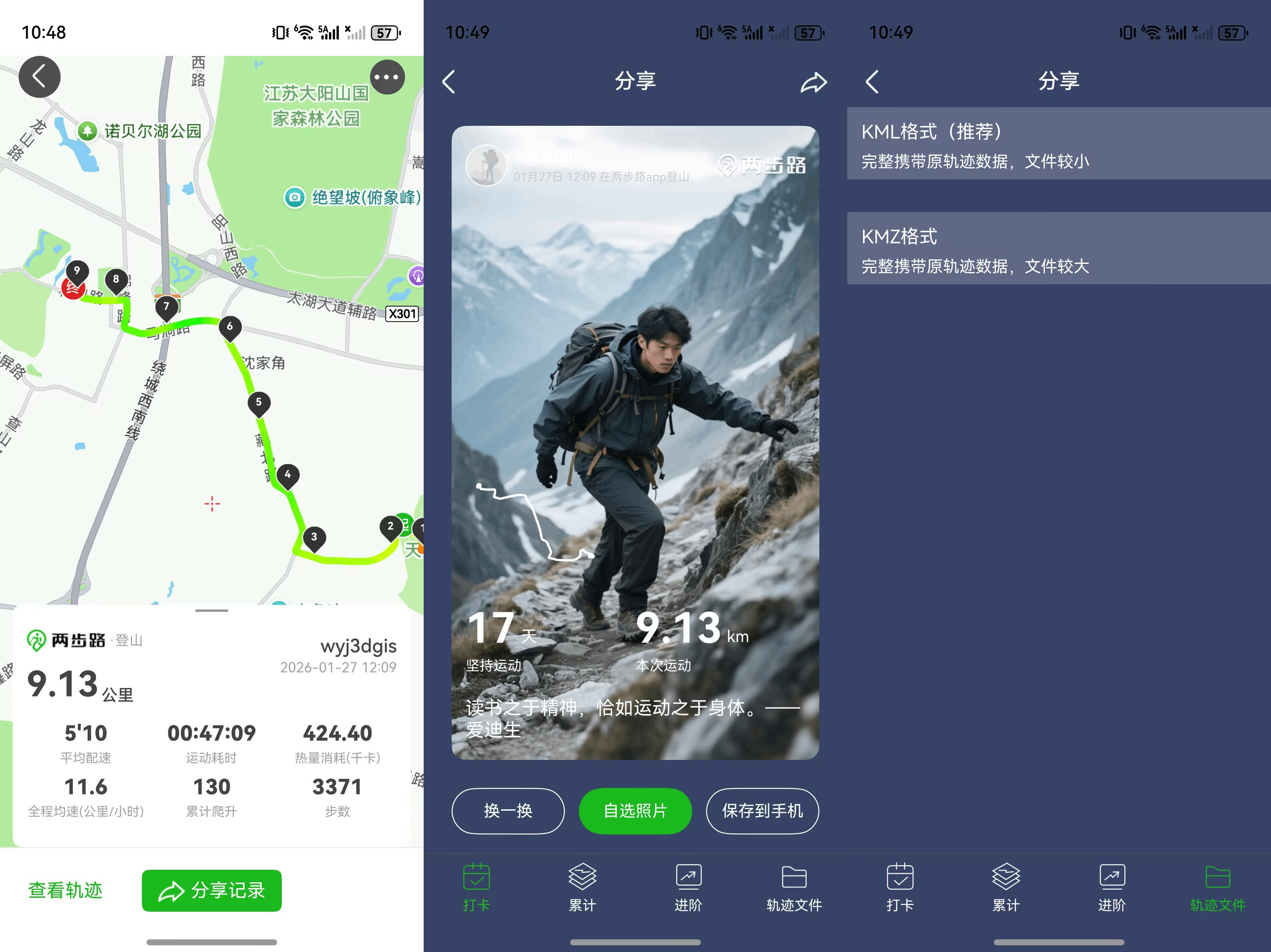
b.有两步路记录的轨迹,并导出为kml格式。
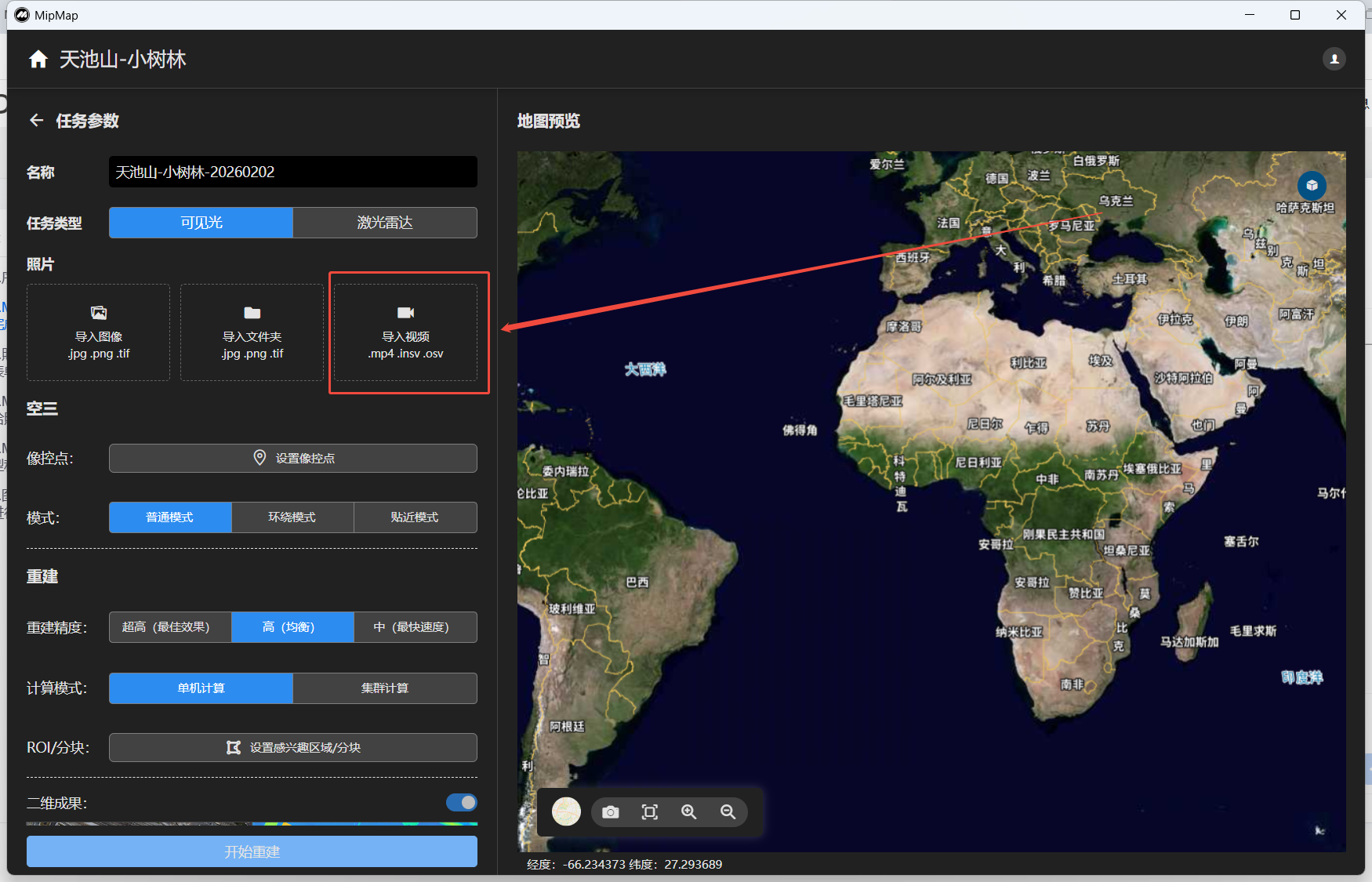
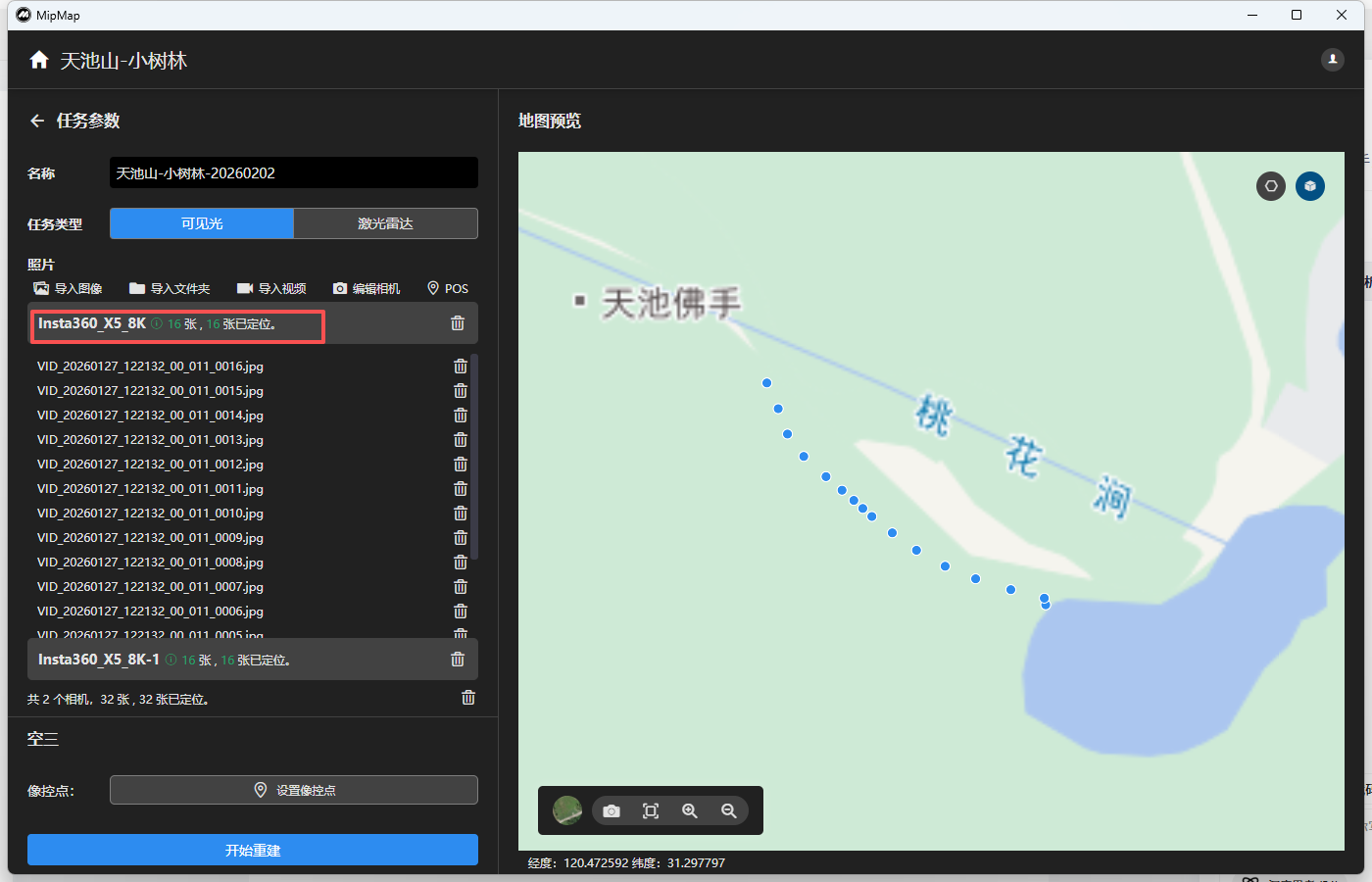
MipMap导入数据
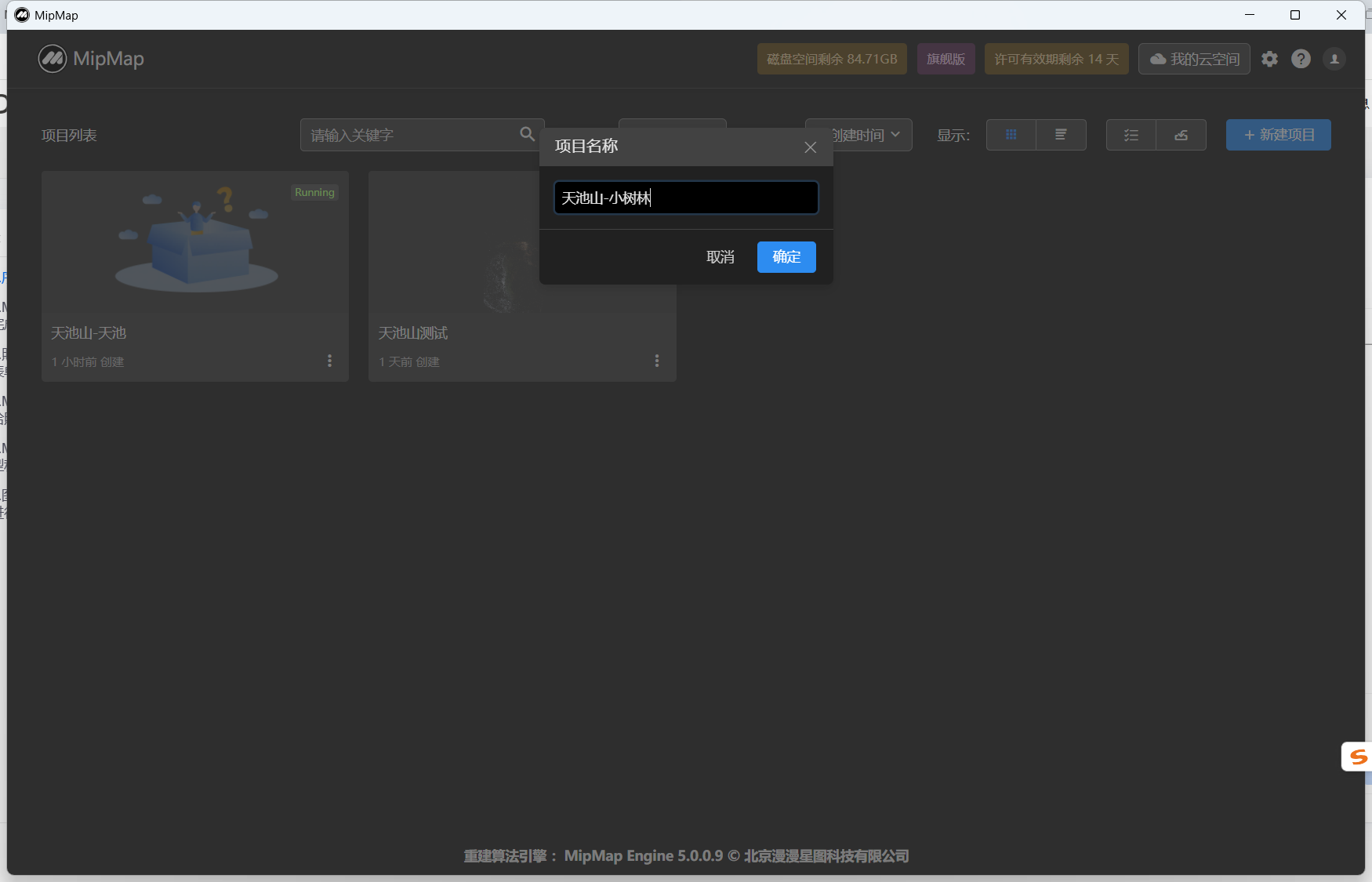
新建项目,名称随便起
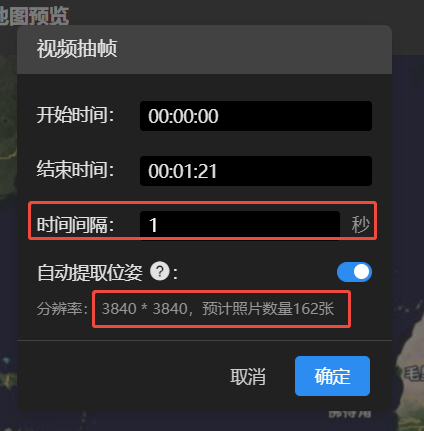
此处需要注意,提取时间间隔会影响参与重建的照片数量,时间越短,参与重建的照片数量越多,时间越长,参与重建的照片越少。如果设置1秒,那一分钟的视频就只有60张全景照片参与重建。
这里实际看到预计照片数量刚好是时长按1秒间隔的2倍,是因为mipmap是把全景照片拆解为了两个鱼眼照片进行重建的。
常规时间间隔,如果是步行,就采用1秒基本就可以了
如果核心目的是跑3D高斯,那间隔越小,效果越好,建议不低于0.2,就是一秒钟最多五张,否则运算量太大,效果也有限。
ps:这里建模看着是基于视频,其实是提取了视频里面的每一帧作为照片进行建模的。
2.照片文件转CSV网页工具得到pos表单
这个环节就用到了AI写的html工具,无需安装额外的软件,有浏览器就可以直接使用
页面下载地址:https://download.csdn.net/download/xiaopeixiaojun/92627853
页面运行效果:
共计有4个配置项
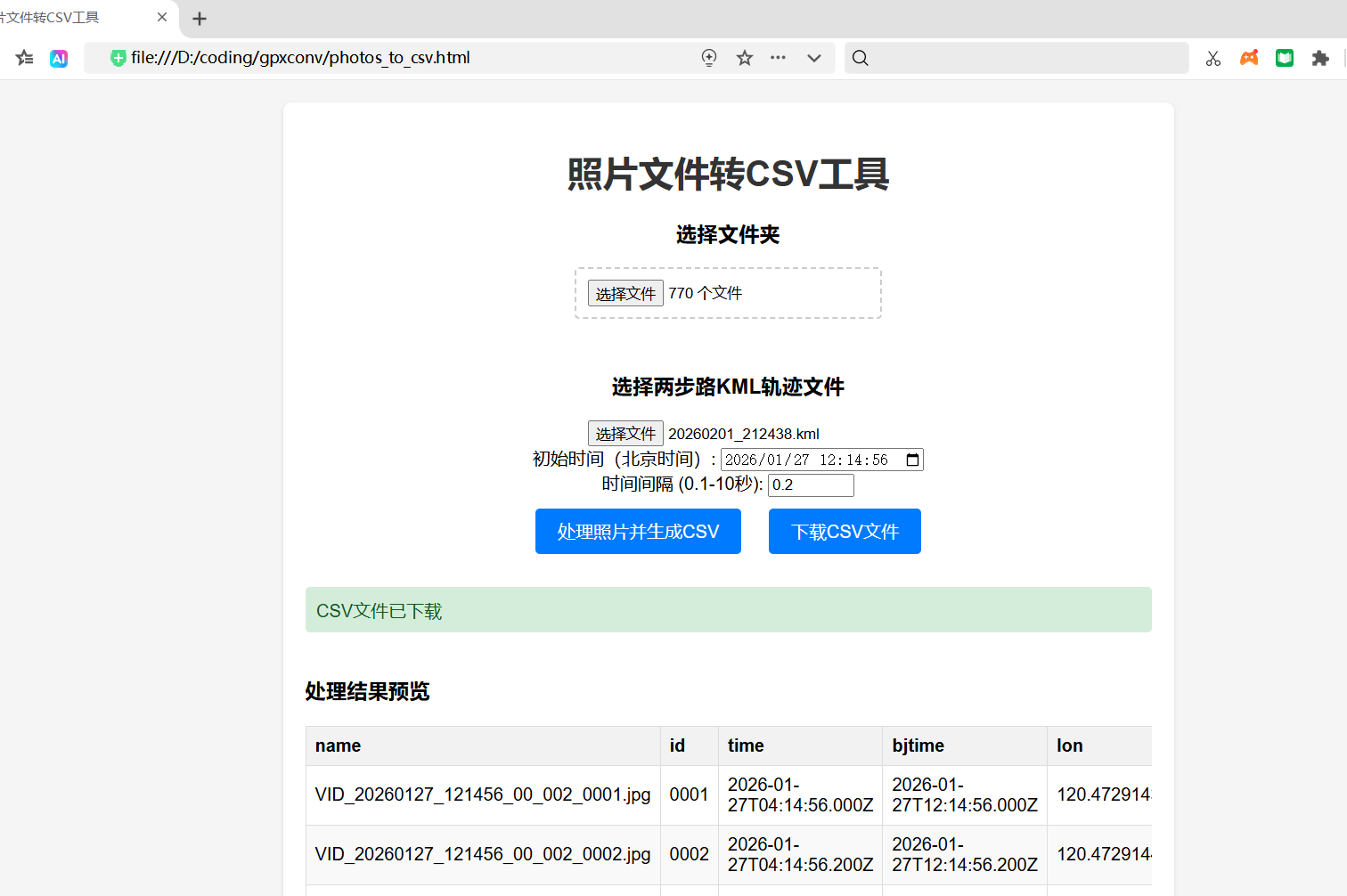
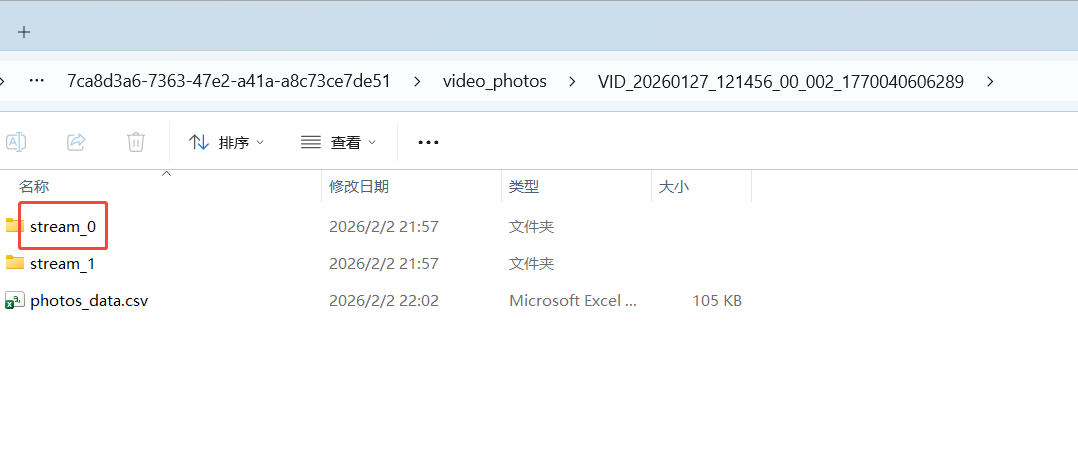
1.选择文件夹:
选择的是MipMap的视频抽帧目录:
这一步的目的是获取图片列表。
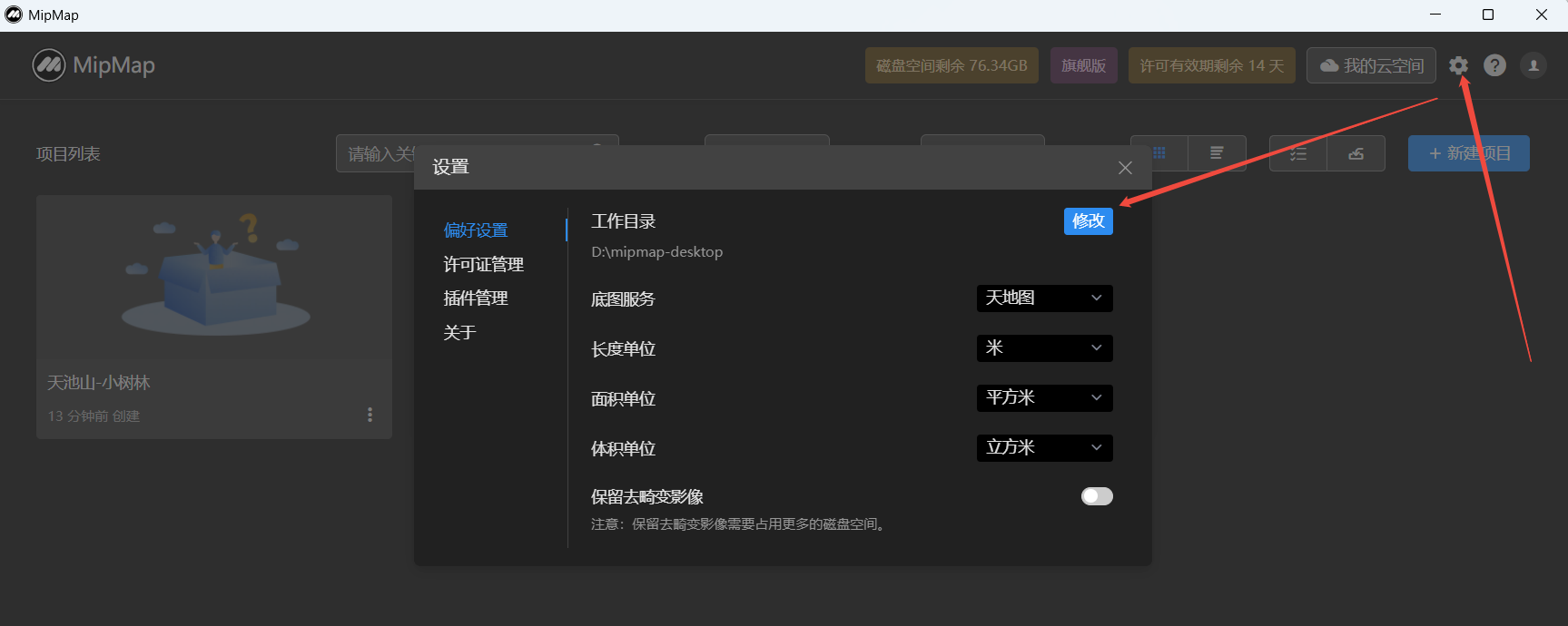
D:\mipmap-desktop这是软件配置的项目目录。
7ca8d3a6-7363-47e2-a41a-a8c73ce7de51这应该是账户的id,看自己的就好,后面自己看都能对上。
D:\mipmap-desktop\7ca8d3a6-7363-47e2-a41a-a8c73ce7de51\video_photos\VID_20260127_121456_00_002_1770040606289
如果找不到目录,可以看下软件的配置
2.选择轨迹文件
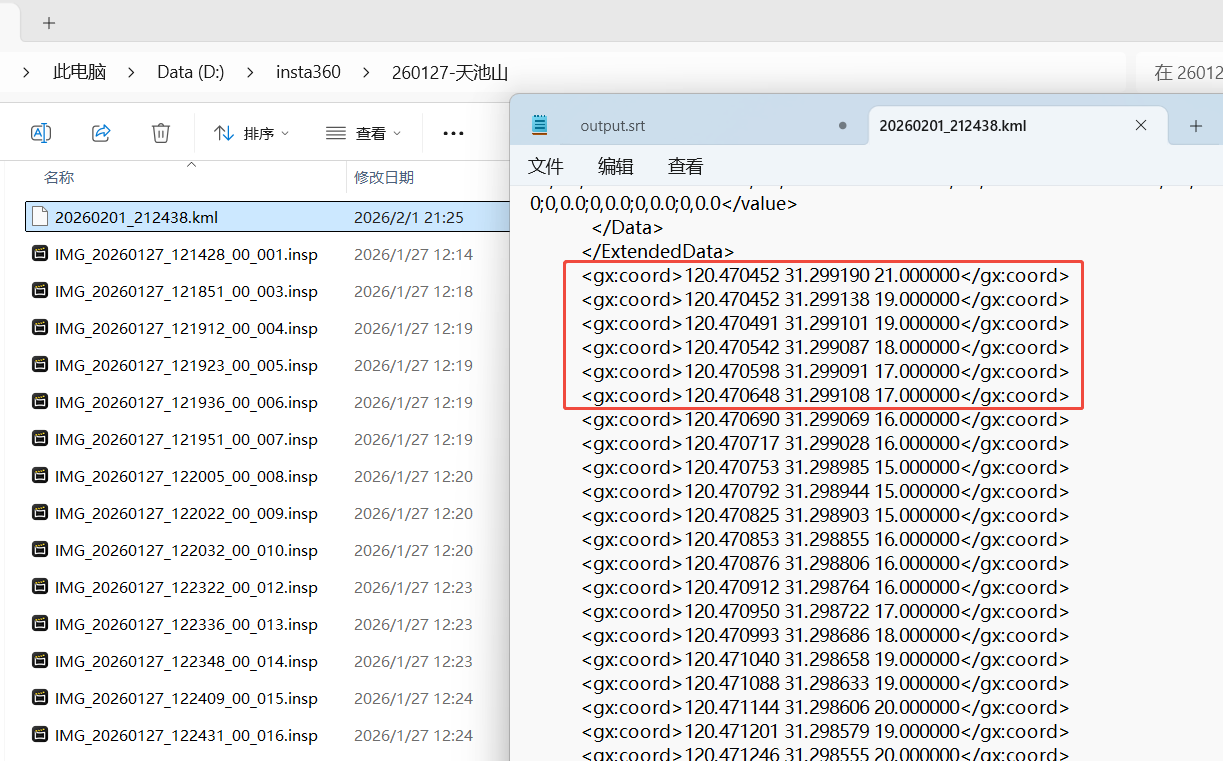
这一步的目的是获取行走时记录的经纬度坐标
直接选择两步路中导出的kml文件即可
3.配置视频的拍摄时间
这一步的目的是设置视频开始拍摄的时间,然后根据间隔计算出抽帧的每一张照片的时间,通过时间和轨迹文件进行匹配插值,得到gps轨迹。
此处录入的间隔就是MipMap导入视频时设置的抽帧间隔。
3.MipMap导入csv格式的pos表单,给照片赋予空间信息
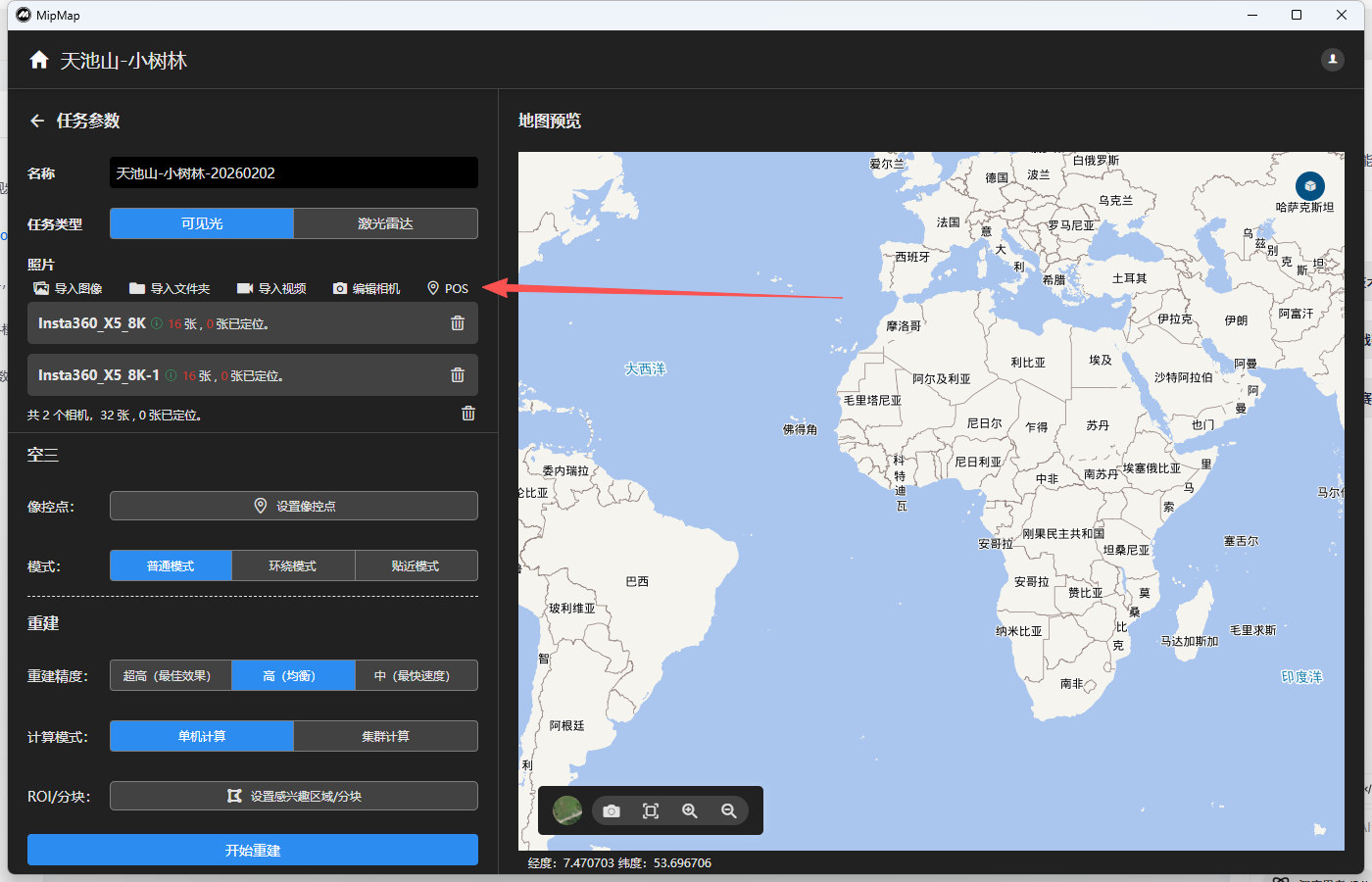
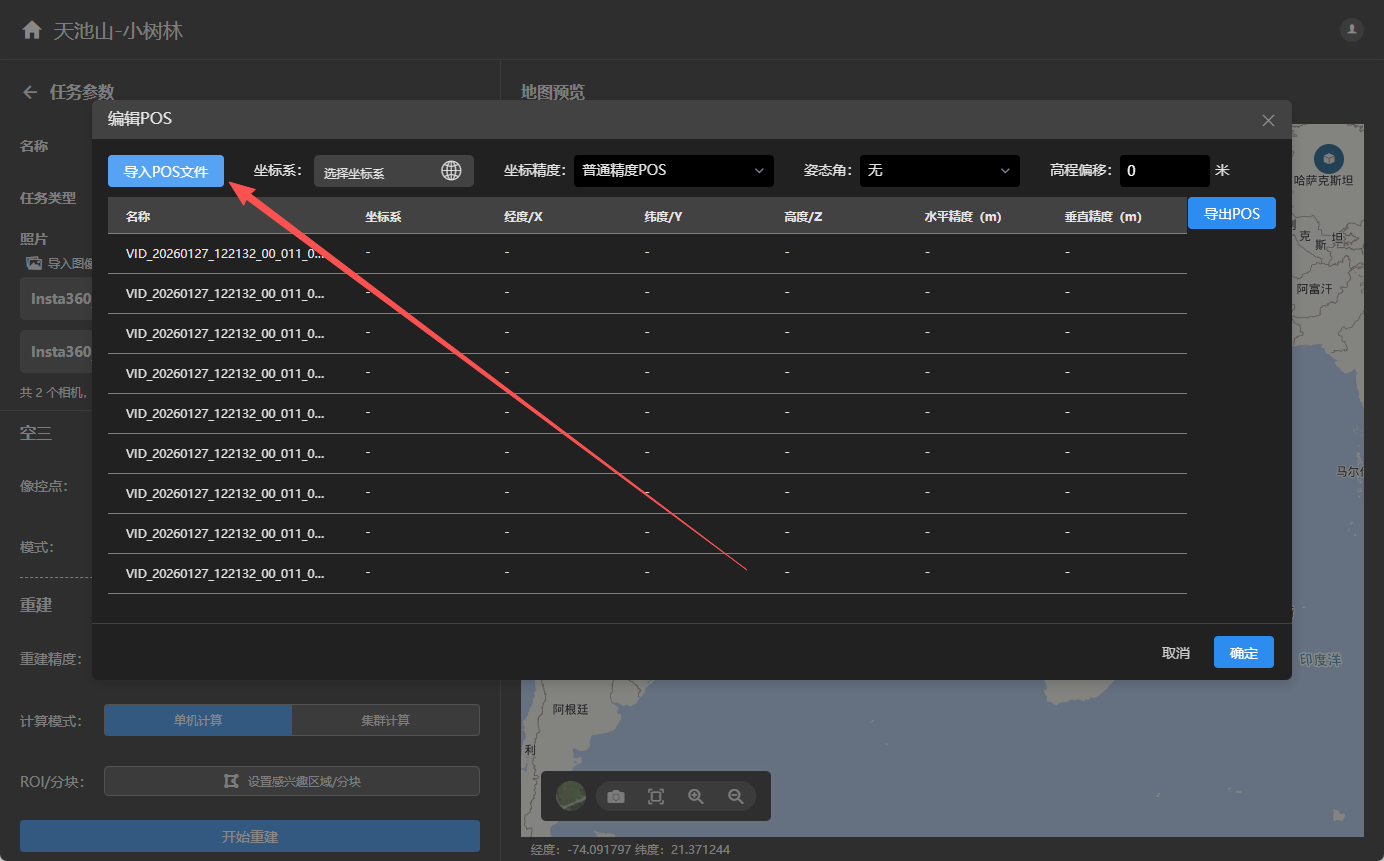
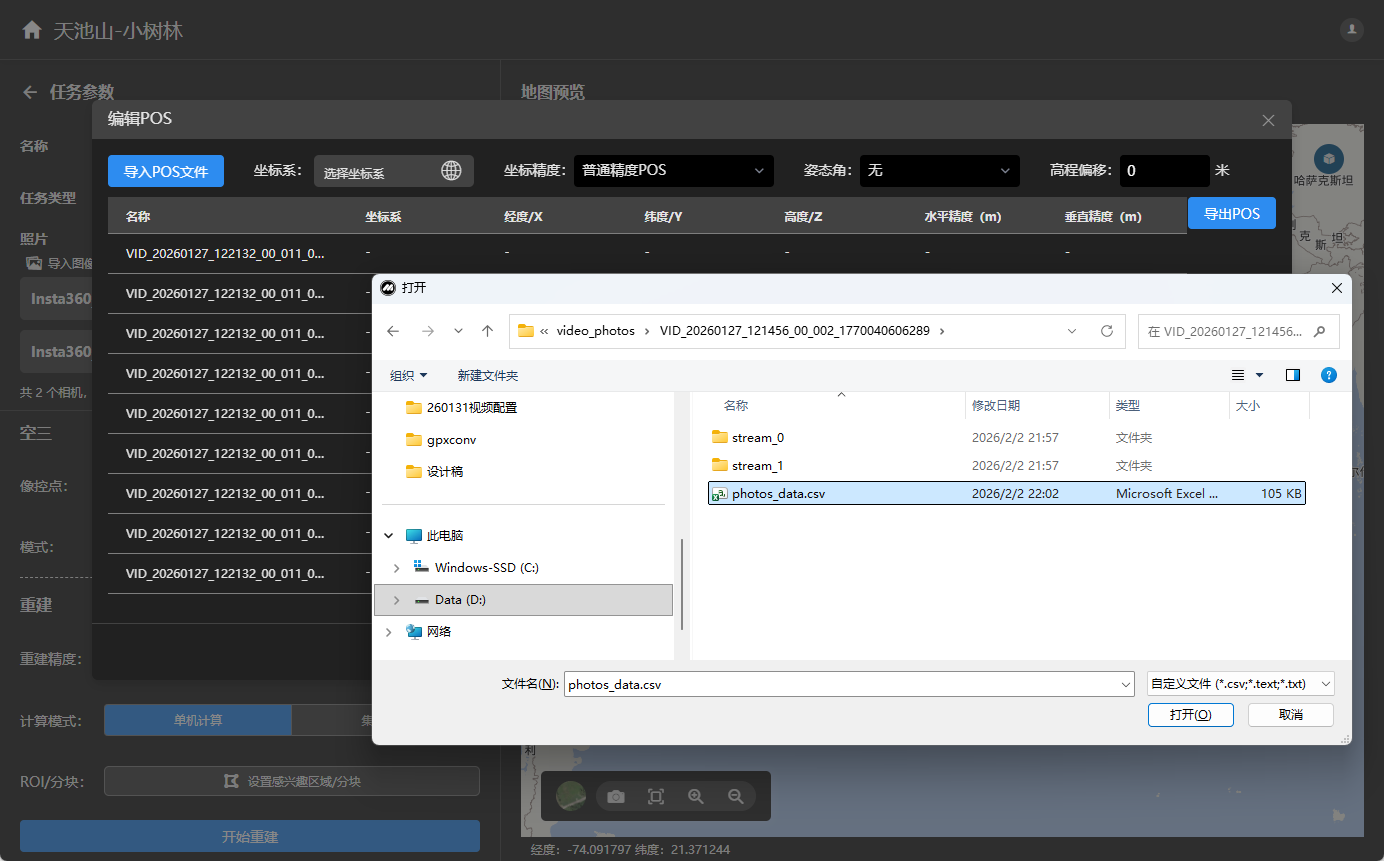
选择刚才生成的csv文件
指定字段名称
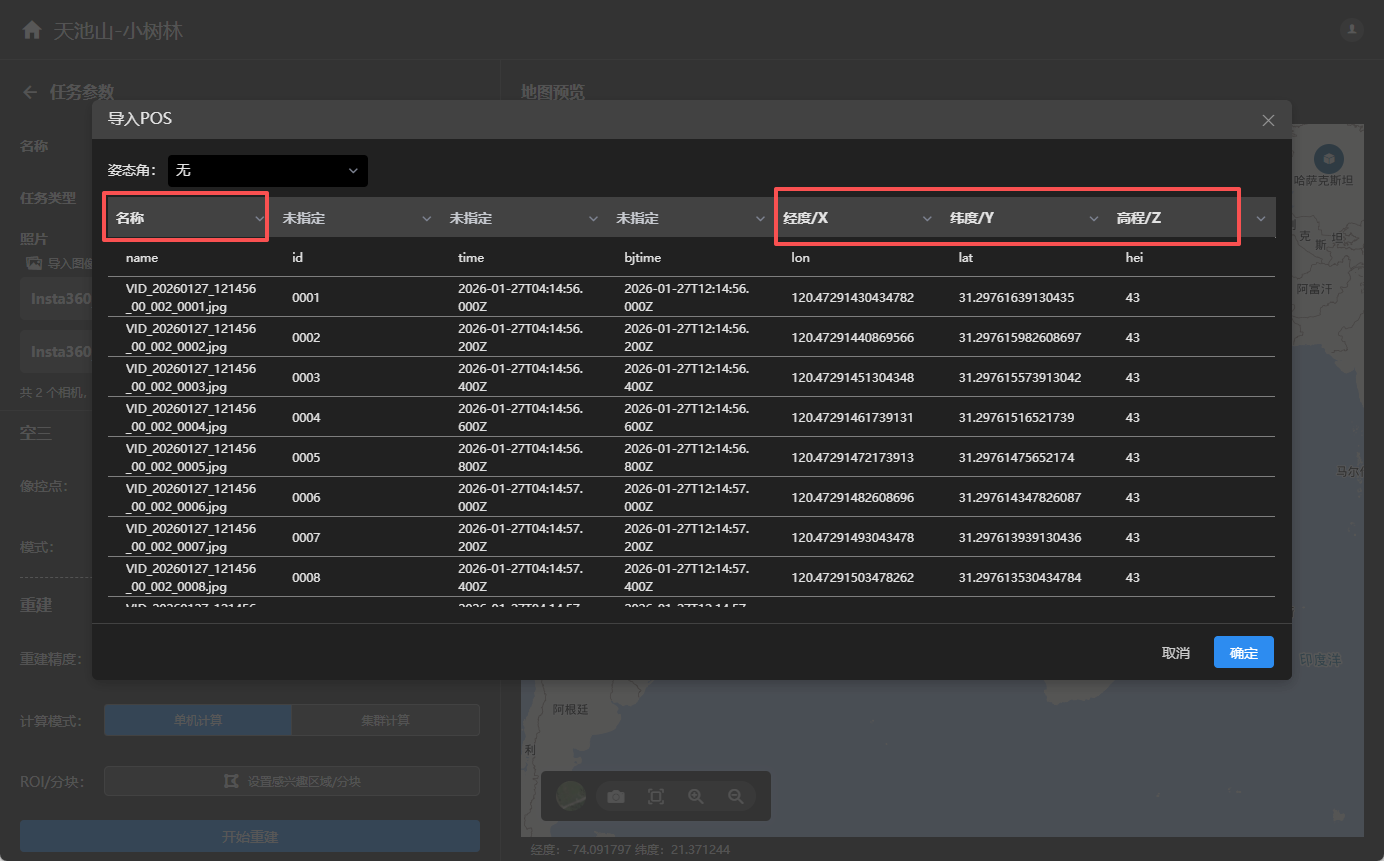
配置坐标投影信息
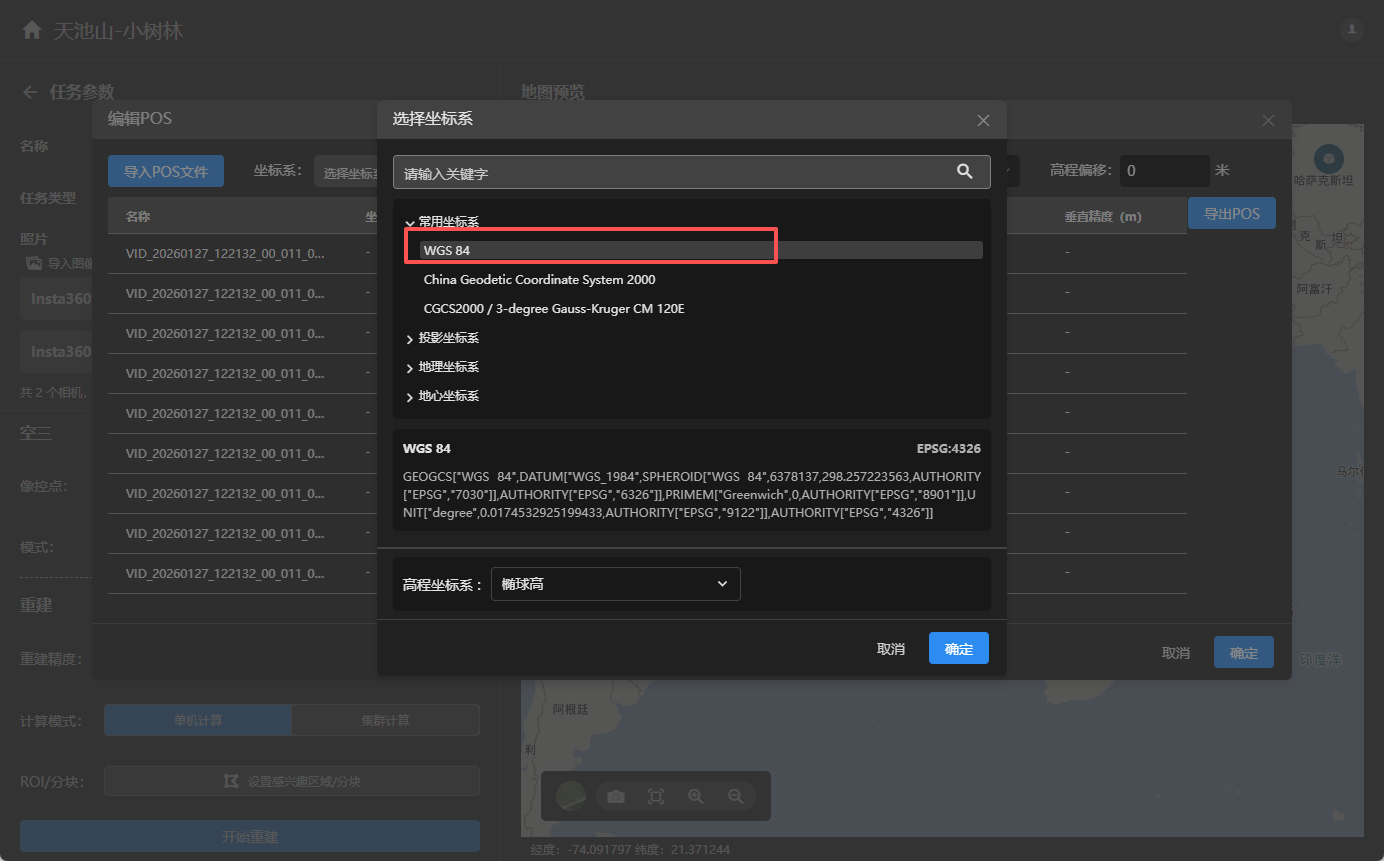
设置pos精度
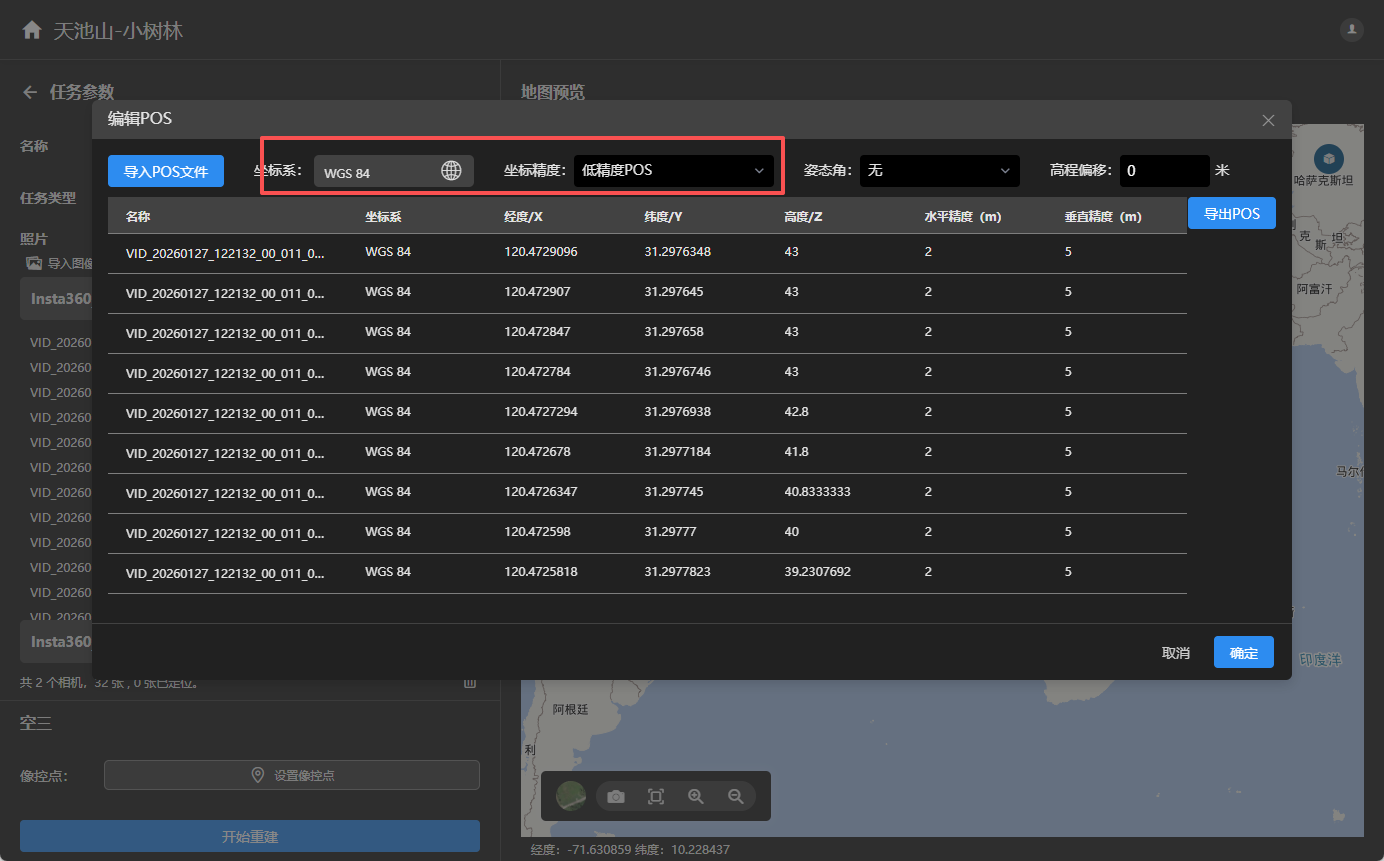
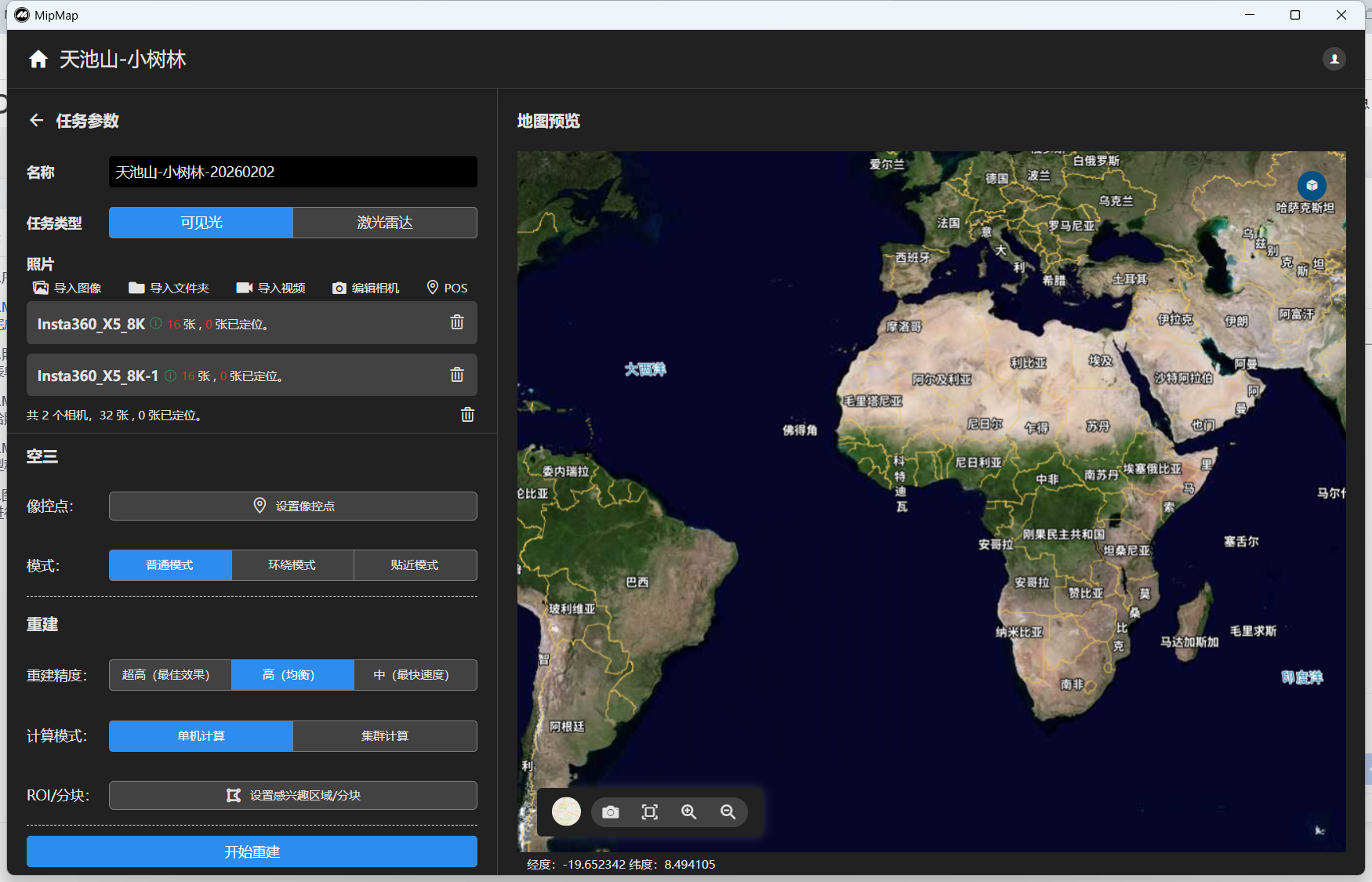
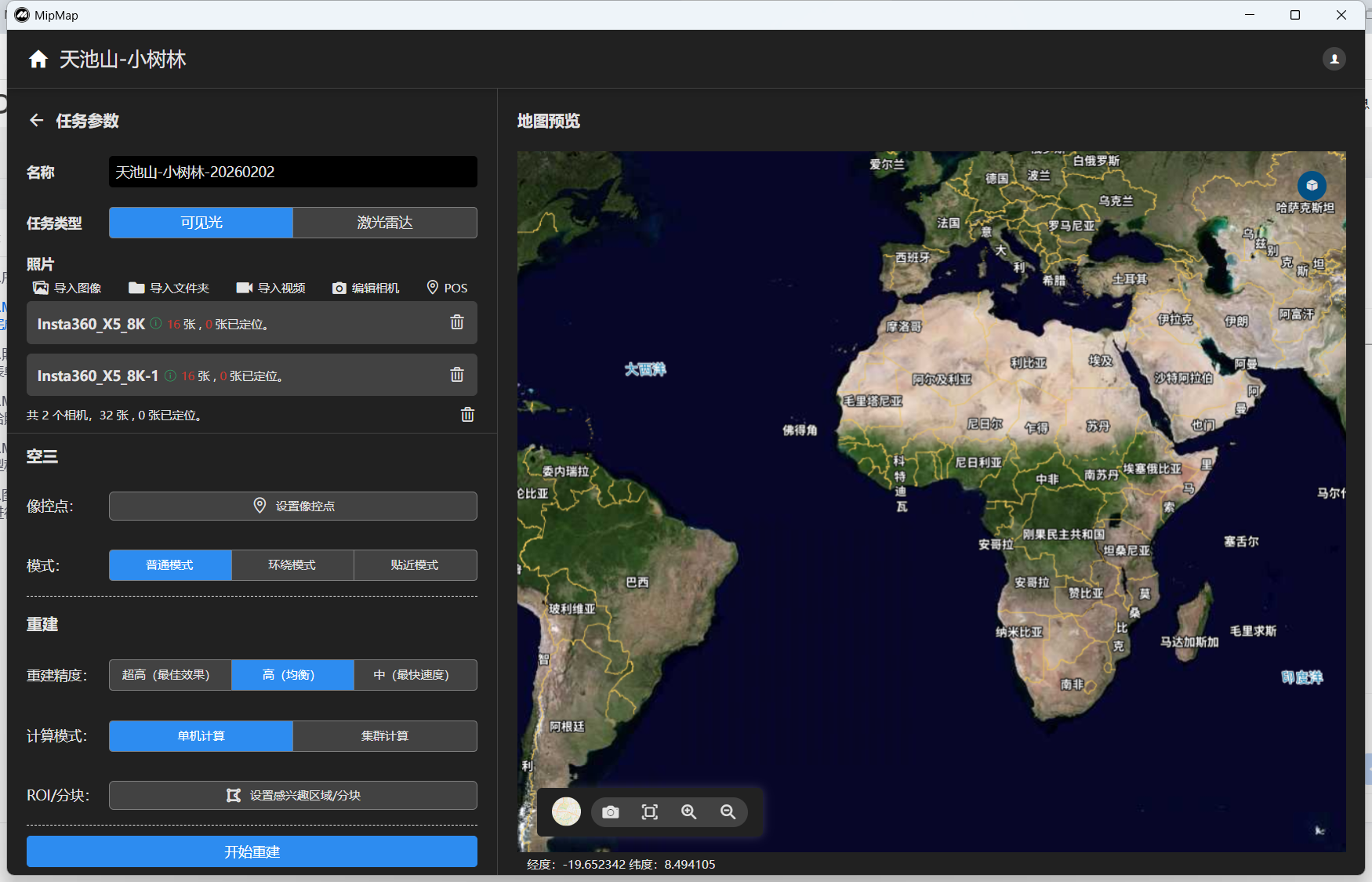
可以看到数据都有了pos
4.MipMap三维重建得到osgb倾斜模型和ply3D高斯数据
大部分参数都可以采用默认值
3d高斯默认无法打开,需要插件支持,按照提示下载插件即可。
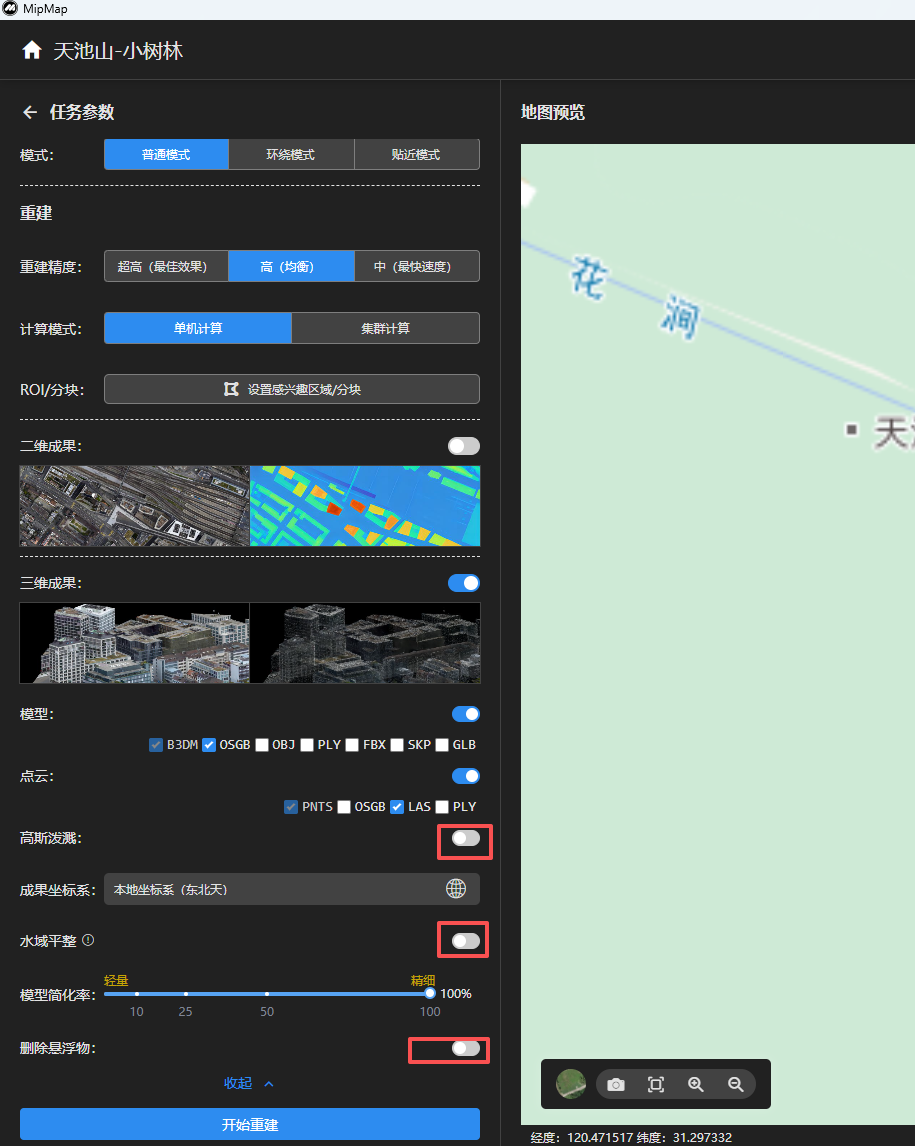
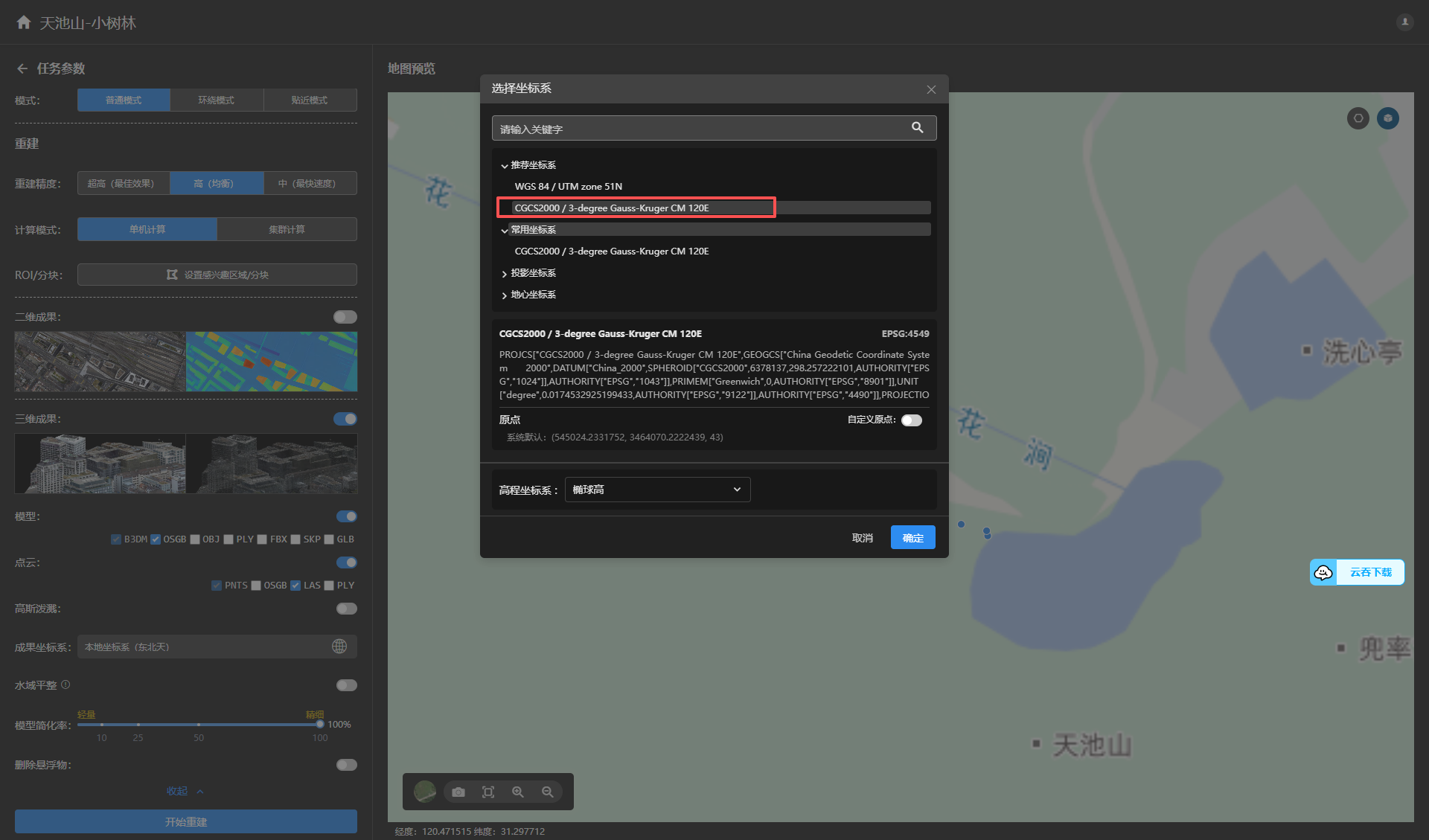
对于坐标系建议根据自己的位置,选择对应的国家2000坐标系。
5.图新GIS云平台制作在线查看链接可手机端查看
链接地址:
http://txcloudservice.tuxingis.com/w?s=Ifeyqu
效果:

手机或者微信上查看效果:

备注:
示例中看到的倾斜模型,采集时间10分钟,分辨率8k,抽帧间隔1秒,参与计算全景600多张。
没有顶部,宏观视野不好,但是第一视角效果很好。
手机上如果操作不顺畅,可以点击飞行按钮,进行三维飞行浏览。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 14
14 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)