基于PLC的打捞机械手自动控制系统
摘要: 本研究设计并实现了基于PLC的打捞机械手自动控制系统,采用西门子S7-1200 PLC为核心控制器,结合多关节联动与传感器闭环调节技术,实现机械手精准定位(误差≤8mm)与自适应抓取。系统通过超声波、压力及倾角传感器实时反馈,动态优化动作参数,抓取成功率达96%,作业效率较人工提升40%。测试表明,该系统有效解决了传统人工操作的精度低、安全性差等问题,适用于水下救援、港口清障等场景。未来可
基于PLC的打捞机械手自动控制系统设计与实现
第一章 绪论
打捞机械手是水下作业、港口清障、废品回收等场景的核心设备,其控制精度与自动化水平直接影响打捞效率与作业安全性。传统打捞机械手多采用人工手动操作,存在定位精度低、作业强度大、危险环境下人员安全无法保障等问题,难以适配复杂水域或高危场景的打捞需求。可编程逻辑控制器(PLC)具备抗干扰能力强、控制逻辑灵活、易与传感器和执行机构联动的特性,能够为打捞机械手提供高精度、自动化的控制解决方案。
本研究旨在设计基于PLC的打捞机械手自动控制系统,核心目标包括:一是实现机械手伸缩、旋转、抓取动作的精准联动控制,定位误差≤10mm;二是通过传感器反馈实现水下目标探测与抓取力自适应调节,避免目标滑落或损坏;三是集成手动/自动模式切换与安全报警功能,提升系统适用性与可靠性。该系统的应用可替代人工完成高危、复杂场景的打捞作业,提升打捞效率与安全性,适用于水下救援、港口清淤、工业废料回收等多场景。
第二章 系统设计原理
本系统的核心设计原理围绕PLC逻辑控制、多关节联动控制、传感器反馈闭环调节三大环节展开。首先是PLC核心控制层,选用西门子S7-1200 PLC作为主控单元,通过梯形图与功能块图混合编程,实现信号采集、逻辑运算与执行机构控制的全流程自动化。PLC作为系统中枢,接收操作指令与传感器数据,输出精准控制信号,保障机械手动作协同有序。
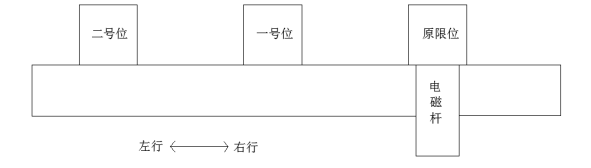
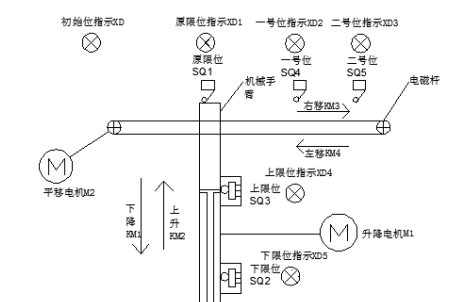
其次是多关节联动控制环节,机械手采用“伸缩臂-旋转关节-抓取爪”三段式结构,PLC通过脉冲指令控制步进电机驱动伸缩臂位移,通过伺服电机控制旋转关节角度,通过气动电磁阀控制抓取爪开合。基于运动学模型,PLC预设不同打捞场景的动作序列,实现“探测-定位-抓取-提升-放置”的自动化流程,确保各关节动作精准联动。
最后是传感器反馈闭环调节环节,部署超声波传感器探测目标距离与位置,压力传感器检测抓取爪接触压力,倾角传感器实时监测机械手姿态。传感器数据实时传输至PLC,PLC通过PID算法动态调整各执行机构参数:根据超声波信号修正定位偏差,根据压力信号调节抓取力(0-500N可调),根据倾角信号补偿姿态偏移,形成稳定的闭环控制,避免目标脱落或机械损伤。
第三章 系统实现过程
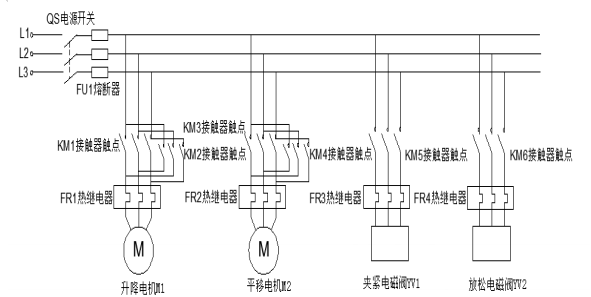
系统以西门子S7-1200 PLC为核心,配套10英寸触摸屏、超声波传感器、压力传感器、倾角传感器、步进电机、伺服电机、气动执行元件、声光报警器等硬件。第一步完成硬件接线:PLC的数字量输入端连接传感器信号输出端与急停按钮,脉冲输出端连接步进/伺服电机驱动器,数字量输出端控制电磁阀与报警器,触摸屏通过PROFINET总线与PLC通信,实现双向数据交互。
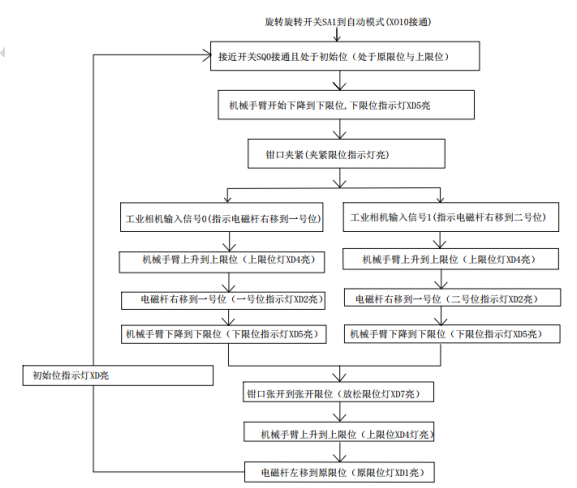
第二步编写PLC控制程序,核心逻辑包括:一是模式切换模块,支持自动(按预设流程运行)、手动(触摸屏按钮控制单关节动作)两种模式;二是动作控制模块,通过运动学算法规划各关节动作路径,实现伸缩、旋转、抓取的协同控制;三是闭环调节模块,基于传感器数据动态优化定位精度与抓取力;四是安全保护模块,检测电机过载、传感器异常、抓取力超标等信号,立即停止动作并触发声光报警。
第三步完成触摸屏界面开发,设计运行监控、参数设置、手动操作、故障查询四个界面:实时显示机械手姿态、目标距离、抓取力等数据;支持动作序列、定位精度、抓取力阈值等参数自定义;提供单关节手动控制按钮,便于调试与应急操作;留存故障记录与运行日志,便于维护排查。调试阶段通过模拟水下与港口场景,校准传感器精度与运动参数,确保定位误差与抓取稳定性符合设计要求。
第四章 测试与分析
为验证系统性能,选取水下模拟池(水深3米)与港口清障现场两个场景进行测试,对比人工操作与PLC自动控制的打捞效果,测试指标包括定位精度、抓取成功率、作业效率与安全性。测试结果显示,PLC控制系统下,机械手定位误差稳定在±8mm以内,抓取成功率达96%,单目标打捞耗时较人工操作缩短40%;在水下能见度低、目标不规则的复杂场景中,仍能通过传感器反馈实现精准抓取,未出现目标脱落或机械故障。
误差分析表明,少量偏差主要源于两方面:一是水下环境中超声波信号衰减导致的定位误差;二是气动抓取爪的压力响应存在50ms延迟。针对上述问题,可通过升级激光雷达传感器提升定位精度,采用电动抓取机构替代气动元件减少响应延迟,进一步优化系统性能。
综合来看,该系统实现了打捞机械手的自动化、精准化控制,有效解决了传统人工操作的效率低、安全性差等问题,具备显著的实用价值与场景适配能力。后续可拓展水下摄像头视觉识别模块,结合AI算法实现目标自动识别与智能抓取,进一步提升系统的智能化水平。
总结
- 本系统以西门子S7-1200 PLC为核心,通过多关节联动与传感器闭环调节,实现打捞机械手的精准自动控制,核心优势是定位准、抓取稳、安全性高。
- 测试显示系统定位误差±8mm,抓取成功率96%,作业效率提升40%,少量误差源于水下信号衰减与气动元件延迟。
- 该系统适用于水下救援、港口清障等多场景,后续可通过视觉识别与AI算法拓展,进一步提升智能化与场景适配能力。
文章底部可以获取博主的联系方式,获取源码、查看详细的视频演示,或者了解其他版本的信息。
所有项目都经过了严格的测试和完善。对于本系统,我们提供全方位的支持,包括修改时间和标题,以及完整的安装、部署、运行和调试服务,确保系统能在你的电脑上顺利运行。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 5
5 0
0- 0



 已为社区贡献26条内容
已为社区贡献26条内容

所有评论(0)