智能摆放新方案:GOPLA框架在Stretch 3开源操作机器人上实现空间常识突破
摘要:慕尼黑工业大学与苏黎世联邦理工联合研发的GOPLA系统在机器人智能摆放领域取得突破。该系统通过分层决策架构(语义理解-空间规划-动作执行),结合大模型与领域知识,显著提升复杂环境下的物品摆放成功率30%。研究采用低成本数据生成技术解决训练数据稀缺问题,并在HelloRobot Stretch3移动操作平台上验证了实用性。该成果为具身智能在家庭服务等场景的应用提供了新思路,相关论文已发表于ar
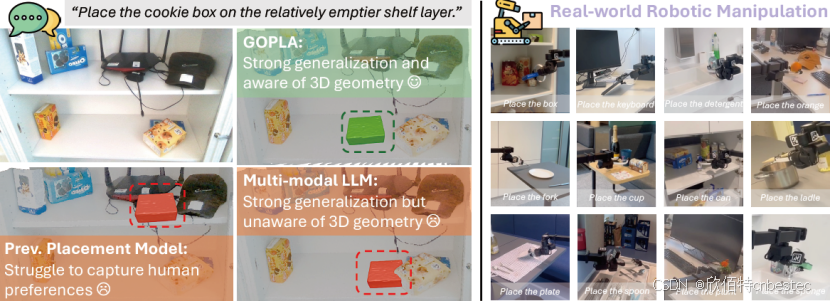
你是否曾希望家里的机器人助手不仅能递水,还能在你做完饭后"顺手"把盘子放到碗架的正确位置?这看似简单的"顺手一放",对机器人而言却是一场巨大的智能挑战。
近日,慕尼黑工业大学与苏黎世联邦理工联合推出的GOPLA系统,在这一难题上取得了显著进展。这项前沿研究在Hello Robot Stretch 3移动操作机器人上完成验证,该具备"空间常识"的智能系统,在复杂摆放任务上的成功率比现有优秀方法高出约30%。
破解"摆放"难题:从语义理解到物理约束
机器人智能(具身智能)的重要目标之一是让机器能像人一样在物理世界中自主、合理地行动。而"物体放置"是检验其智能水平的关键环节。其核心挑战在于:如何让机器同时理解人类模糊的语义指令("放得顺手点")和精确的物理几何约束("不能碰到其他东西")?
GOPLA的"三层大脑":各司其职的智能协同
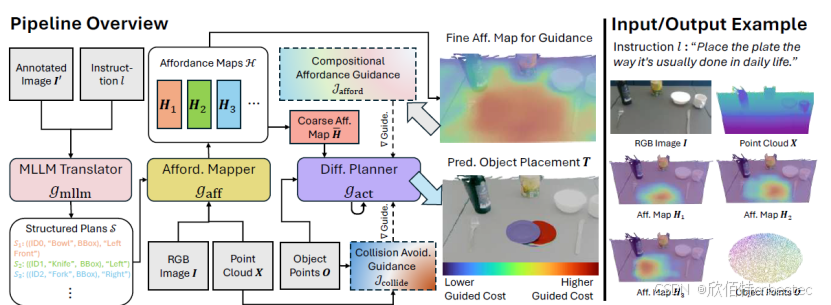
GOPLA的解决方案关键在于其分层决策系统,它让每个部分专注于自己擅长的任务:
1、高层"AI翻译官":利用大型多模态模型理解开放式指令,并将其"翻译"成多个精确的"结构化计划"。
2、中层"空间参谋":将结构化计划转化为3D空间中的"可行性地图",为具体行动提供几何常识指导。
3、底层"动作执行官":基于扩散模型生成最终动作,并引入实时校准机制确保物理合理性。
低成本数据引擎:突破AI训练瓶颈
该研究的突出亮点之一是构建了低成本自动化数据生成流水线。它能将少量真人示范扩展为海量、多样且带有精确几何标注的合成训练数据。这显著缓解了机器人学习对昂贵、稀缺的真实演示数据的依赖,为解决数据稀缺问题提供了可行方案。
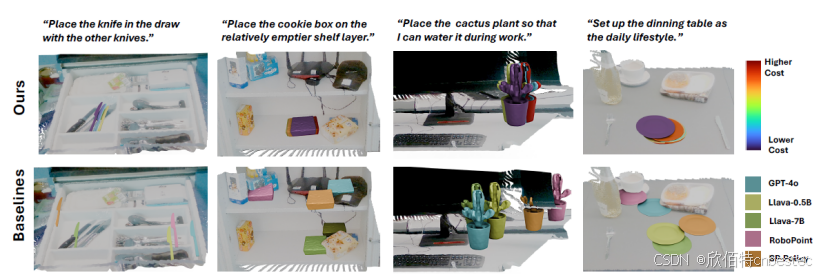
性能表现:显著优于基线模型
实验结果表明,GOPLA在放置准确性、物理合理性和综合成功率上均表现突出,相较于其他优秀方法具有明显优势。
Hello Robot Stretch 3:可靠的算法验证平台
任何先进算法都需在真实物理世界中验证。本研究选择在Hello Robot Stretch 3开源操作机器人上进行最终测试与部署,体现了该Hello Robot具身智能平台在科研中的重要价值:其开放的软件架构使复杂的感知-决策-控制流程能够快速集成与迭代。Stretch 3移动操作机器人专为家庭等日常环境设计,在其上的成功验证,切实证明了该技术从实验室走向应用的潜力。
核心价值与启示
GOPLA的"大模型+领域专家"混合架构,为解决更复杂的具身智能问题提供了有效路径。而Hello Robot移动操作机器人作为可靠的物理载体,成为连接前沿算法与真实世界的重要桥梁,有力推动着具身智能的创新进程。

论文来源
标题:GOPLA: Generalizable Object Placement Learning via Synthetic Augmentation of Human Arrangement
作者:Yao Zhong, Hanzhi Chen, Simon Schaefer, Anran Zhang, Stefan Leutenegger
链接:https://arxiv.org/abs/2510.14627
欢迎关注 “欣佰特科技” ,持续为大家带来 “具身智能领域”前沿技术及应用!详情可邮件咨询sales@cnbestec.com

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 36
36 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)