任务导向人工智能应用中认知闭环切片的原理说明
本文提出"认知闭环切片"概念,旨在解决AI模型在任务导向系统中作为独立组件时存在的认知能力不足问题。文章指出,真正的认知能力应依附于具体任务节点,通过"状态-约束-行动-证据"闭环实现。一个完整的认知闭环切片包含六个要素:任务语义锚点、状态切片、约束结构、AI模型机制角色、行动选择接口和证据反馈机制。只有当AI模型被结构化嵌入这个闭环并持续参与任务推进时,才
一、问题提出:为何需要“认知闭环切片”
在当下的人工智能工程实践中,AI 模型已被广泛嵌入到各类任务导向系统中,如生产调度、质量诊断、运维决策与流程优化等。然而,大量实践表明,仅将 AI 模型作为独立的分析或预测组件,并不足以构成真正意义上的“认知能力”。模型往往以一次性推理输出的形式存在,其结果既缺乏明确的任务责任归属,也未能持续参与任务执行过程中的状态演化。
这一问题的根源在于:任务导向系统中的认知并非连续、整体性的系统属性,而是依附于具体任务节点、以离散形式发生的过程性能力。因此,若要在工程上使 AI 成为任务执行过程中的认知部件,就必须在任务节点层面,对认知过程进行结构化与最小化建模。
在此背景下,引入“认知闭环切片(Cognitive Loop Slice)”的概念,具有明确的工程必要性。
二、基本立场:认知必须以任务节点为边界
任务导向系统(task-oriented systems)具有如下基本特征:
-
系统目标通过一组可分解的任务来实现;
-
任务在时间上离散发生,在结构上具有清晰的责任边界;
-
系统运行状态的变化,总是通过任务的启动、推进、完成或失败来体现。
在这一语境下,认知不应被理解为系统整体持续存在的“智能属性”,而应被理解为:
在特定任务节点上,为推进任务目标而发生的、受约束的状态判断与行动选择过程。
因此,工程上可行的认知建模单位,不是“全系统智能”,而是以任务节点为锚点的认知闭环切片。
三、认知闭环切片的基本定义
在任务导向的人工智能应用中,认知闭环切片可定义为:
在一个具有明确责任边界的任务节点上,将 AI 模型嵌入到“状态—约束—行动—证据”的运行闭环中,使其在运行期持续参与任务推进,而非仅提供一次性推理输出的最小认知结构单元。
这一结构强调三点:
-
认知以任务为边界;
-
AI 模型是闭环中的机制部件,而非外置工具;
-
认知是否成立,取决于闭环是否完整,而非模型能力本身。
四、认知闭环切片的结构要素分解
一个在工程上成立的、包含 AI 模型的认知闭环切片,至少应由以下六个结构要素构成。
4.1 任务语义锚点(Task Anchor)
认知闭环必须锚定在一个明确的任务之上。该任务需要具备:
-
清晰的任务目标与完成判准;
-
明确的失败、异常或中断语义;
-
可追溯的责任归属与决策权限边界。
任务语义锚点决定了认知活动“为何发生”,也是认知闭环存在的前提条件。
4.2 状态切片(State Slice)
认知闭环并不处理系统的全部状态,而仅处理与当前任务推进直接相关的状态子集。这一状态切片通常是对物理状态、过程状态、资源状态与历史状态的结构化投影,其核心特征在于:
-
状态是可枚举、可判别的;
-
状态变化能够反映任务推进程度;
-
状态为后续行动选择提供上下文基础。
状态切片构成了认知闭环的时间与语义基座。
4.3 约束结构(Constraints)
约束并非简单的规则集合,而是对认知与行动的结构性限定,包括但不限于:
-
安全、工艺、合规等硬性约束;
-
组织与责任边界约束;
-
可行动域与不可行动域的界定;
-
回滚、人工接管与审计条件。
约束结构在逻辑上先于认知推理,它限定了认知闭环的允许域,是认知成立的起点要素,而非事后过滤机制。
4.4 AI 模型的机制角色定位
在认知闭环切片中,AI 模型并不承担“决策主体”的角色,而是作为状态到行动之间的机制映射部件存在。其功能可能包括:
-
状态判别与估计;
-
趋势预测与风险评估;
-
行动候选生成与排序。
模型的输出是行动提议(action proposal),而非具有责任承诺的最终决策。
4.5 行动选择与执行接口
认知闭环必须以行动为落点,但行动本身需要分层处理:
-
模型生成的行动候选;
-
依据约束、责任与策略进行的行动选择;
-
由系统或执行单元完成的行动执行。
通过这一分层结构,行动成为责任、权限与认知结果的显化形式。
4.6 证据与反馈机制(Evidence Loop)
认知闭环的成立依赖于行动结果的可验证性。证据机制用于回答以下问题:
-
行动是否产生了预期效果;
-
状态是否向任务目标方向演化;
-
是否触发异常、失败或回滚条件。
证据不是简单的日志记录,而是可被下一轮状态判断与认知推理直接使用的最小充分信息集合。
五、认知闭环切片的形式化表达
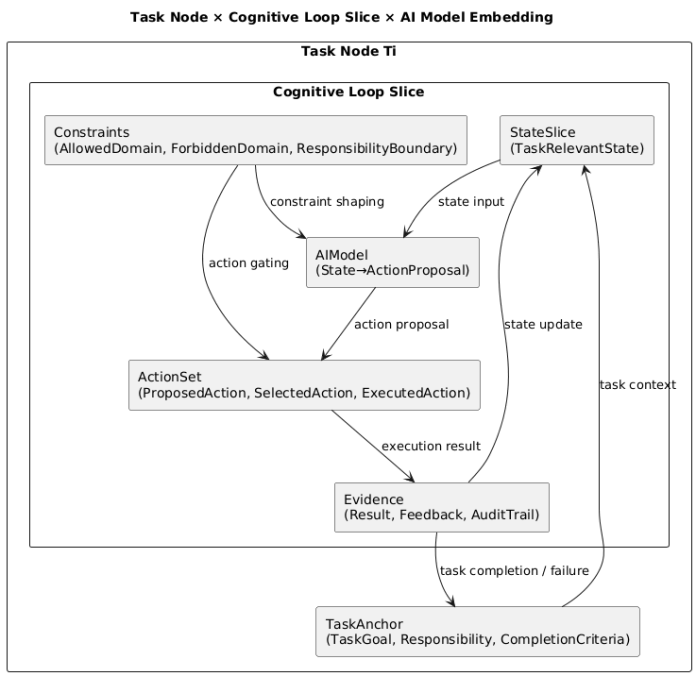
综合上述要素,一个任务节点上的认知闭环切片可形式化表示为:
[
CognitiveSlice(Task_i) =
\langle State_i,\ Constraints_i,\ Model_i,\ ActionSet_i,\ Evidence_i;
]
并且需满足以下工程判准:
-
状态可判别、可回溯;
-
行动可审计、可回滚;
-
证据可复用、可解释;
-
模型可替换、可治理。
若不满足上述条件,即便系统中使用了 AI 模型,也难以认为其具备工程意义上的认知能力。
六、结论
在任务导向的人工智能系统中,认知并非系统级连续能力,而是以任务节点为边界被切分为最小可用的认知闭环结构。只有当 AI 模型被嵌入到“状态—约束—行动—证据”的闭环之中,并在运行期持续参与任务推进时,人工智能才能从外置分析工具转变为任务执行过程中的认知部件。
这一认知闭环切片视角,为人工智能在复杂工程系统中的可解释性、可治理性与可落地性提供了清晰的结构化路径。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 7
7 0
0- 0



 已为社区贡献15条内容
已为社区贡献15条内容

所有评论(0)