解决高阶积分器多智能体系统固定时间一致性问题
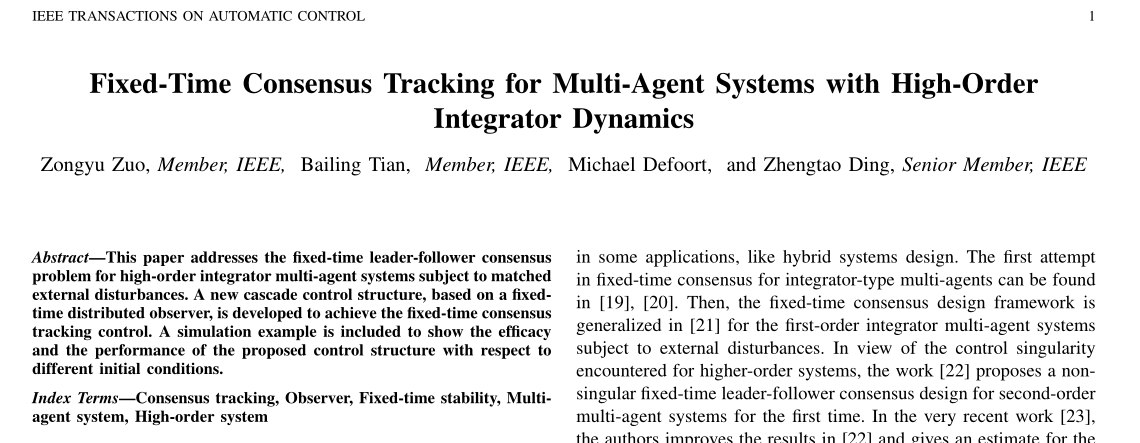
关键词:高阶系统;一致性算法;滑模面;固定时间;观测器;s函数;高阶一致性;主题:解决了受匹配外部干扰影响的高阶积分器多智能体系统的固定时间领导者-跟随者一致性问题。开发了一种新的基于固定时间分布式观测器的级联控制结构,实现了固定时间一致性跟踪控制。Matlab/simulink/s函数在现代控制领域,高阶系统的一致性问题一直是研究热点。尤其是当系统受到匹配外部干扰影响时,如何实现固定时间领导者
关键词:高阶系统;一致性算法;滑模面;固定时间;观测器;s函数;高阶一致性; 主题:解决了受匹配外部干扰影响的高阶积分器多智能体系统的固定时间领导者-跟随者一致性问题。 开发了一种新的基于固定时间分布式观测器的级联控制结构,实现了固定时间一致性跟踪控制。 Matlab/simulink/s函数
在现代控制领域,高阶系统的一致性问题一直是研究热点。尤其是当系统受到匹配外部干扰影响时,如何实现固定时间领导者 - 跟随者一致性,更是颇具挑战。今天咱就来聊聊我是如何借助Matlab/Simulink以及S函数解决这一问题的。
问题背景
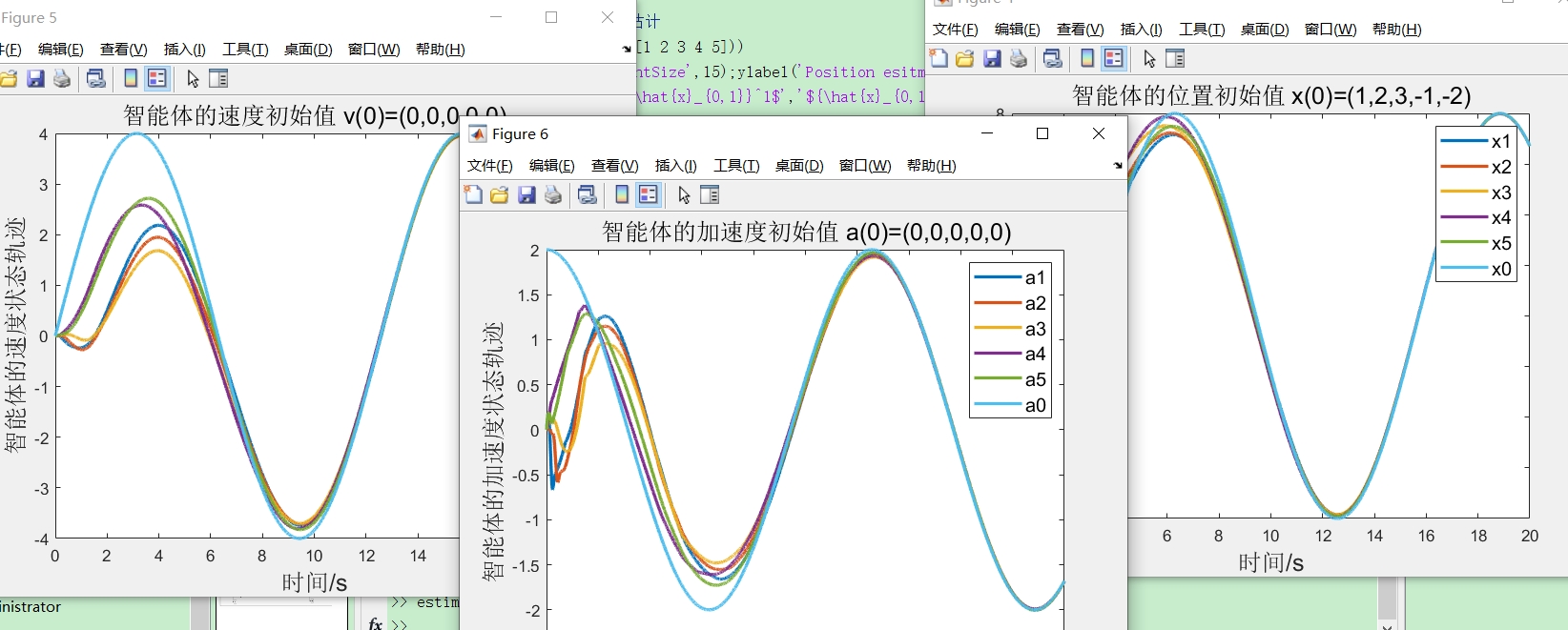
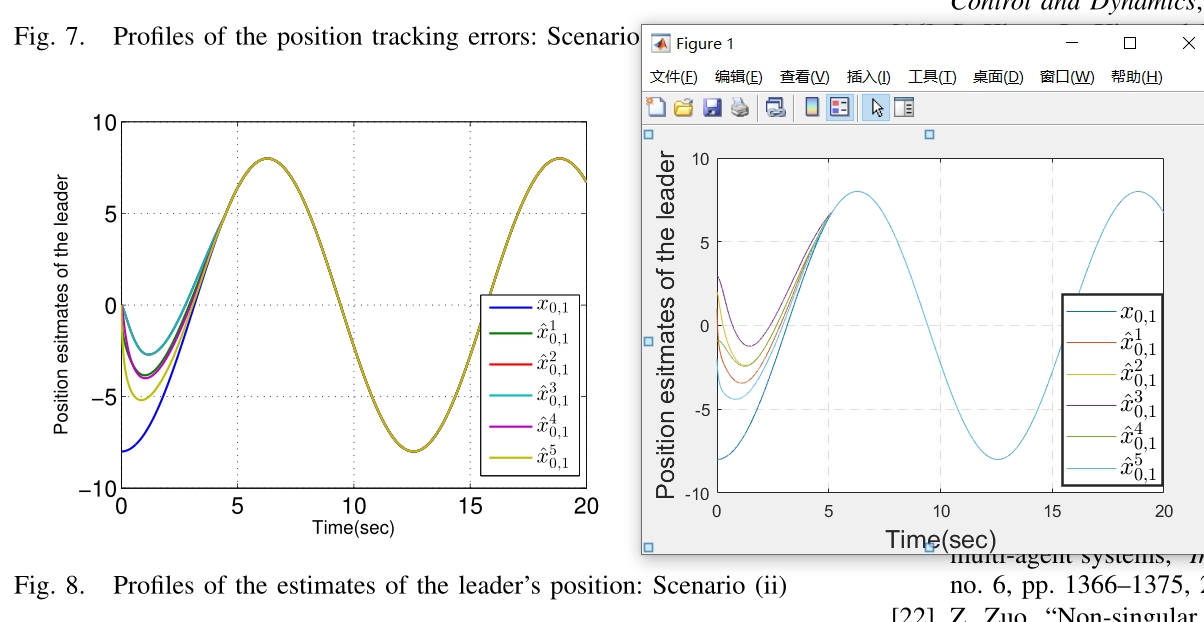
高阶积分器多智能体系统在诸如无人机编队、机器人协作等实际场景中广泛应用。但外部干扰常常破坏系统的一致性。我们的目标就是在这种干扰环境下,实现固定时间内,跟随者能准确跟踪领导者的状态,达到一致性。
解决方案 - 基于固定时间分布式观测器的级联控制结构
这种控制结构是解决问题的核心。它通过设计特定的观测器,对系统状态进行估计,进而实现对干扰的补偿和一致性控制。
固定时间分布式观测器设计
首先,定义观测器的状态方程。假设我们有 $n$ 个智能体,对于第 $i$ 个智能体,其观测器状态可以表示为:
% 伪代码示例
% 观测器状态初始化
for i = 1:n
observer_state(i) = 0;
end这里的观测器状态会不断更新以估计真实状态。通过巧妙设计观测器增益矩阵,使得观测器能在固定时间内收敛到真实状态。例如:
% 计算观测器增益矩阵 L
L = calculate_observer_gain();级联控制结构
在得到准确的状态估计后,我们通过级联控制结构实现一致性控制。将观测器的输出作为控制输入的一部分,构建控制律。
% 控制律计算
for i = 1:n
control_input(i) = control_gain * (leader_state - observer_state(i));
end这里的 control_gain 是根据系统特性和控制目标精心选择的增益参数。
滑模面在一致性控制中的应用
滑模面是实现鲁棒控制的重要手段。在我们的系统中,定义合适的滑模面可以使系统在面对干扰时仍能保持稳定的一致性。例如,定义滑模面函数为:
% 滑模面函数定义
sliding_surface = calculate_sliding_surface(state, observer_state);通过控制使得系统状态在固定时间内收敛到滑模面上,并沿着滑模面运动,从而克服外部干扰的影响。
Matlab/Simulink/S函数实现
S函数搭建核心逻辑
在Matlab/Simulink中,S函数是实现上述算法的关键。S函数是一种特殊的Matlab函数,它允许我们自定义Simulink模块的行为。以下是一个简单的S函数框架示例:
function [sys,x0,str,ts] = my_s_function(t,x,u,flag)
switch flag,
case 0,
[sys,x0,str,ts]=mdlInitializeSizes();
case 1,
sys=mdlDerivatives(t,x,u);
case 2,
sys=mdlUpdate(t,x,u);
case 3,
sys=mdlOutputs(t,x,u);
case 4,
sys=mdlGetTimeOfNextVarHit(t,x,u);
case 9,
sys=mdlTerminate(t,x,u);
otherwise
DAStudio.error('Simulink:blocks:unhandledFlag', num2str(flag));
end
end
function [sys,x0,str,ts]=mdlInitializeSizes()
% 定义S函数的基本属性,如输入输出端口数量、状态变量等
sizes = simsizes;
sizes.NumContStates = 0;
sizes.NumDiscStates = 0;
sizes.NumOutputs = 1;
sizes.NumInputs = 2;
sizes.DirFeedthrough = 1;
sizes.NumSampleTimes = 1;
sys = simsizes(sizes);
x0 = [];
str = [];
ts = [0 0];
end
function sys=mdlOutputs(t,x,u)
% 根据输入计算输出,这里可以实现上述的控制律和观测器计算
leader_state = u(1);
observer_state = u(2);
control_input = control_gain * (leader_state - observer_state);
sys = control_input;
end在Simulink中集成
将上述S函数封装成一个Simulink模块,然后搭建整个多智能体系统的模型。连接各个智能体的输入输出,设置好参数,就可以进行仿真验证了。
关键词:高阶系统;一致性算法;滑模面;固定时间;观测器;s函数;高阶一致性; 主题:解决了受匹配外部干扰影响的高阶积分器多智能体系统的固定时间领导者-跟随者一致性问题。 开发了一种新的基于固定时间分布式观测器的级联控制结构,实现了固定时间一致性跟踪控制。 Matlab/simulink/s函数
通过这种基于固定时间分布式观测器的级联控制结构,结合Matlab/Simulink和S函数的实现,成功解决了受匹配外部干扰影响的高阶积分器多智能体系统的固定时间领导者 - 跟随者一致性问题。希望本文的分享能给大家在相关领域的研究和实践带来一些启发。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 31
31 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)