[AAAI-2025]STDN:时空感知趋势-季节性分解网络在交通流预测中的应用
这篇论文提出了一种 **时空感知的趋势–季节性分解网络(STDN)** 用于交通流预测,针对现有方法在时空建模和序列分解方面存在的不足,联合建模交通数据中的空间依赖、时间周期性以及趋势与季节性结构。该方法通过引入时空嵌入来刻画时间周期特征与路网空间结构,并在此基础上学习动态关系图以捕捉节点间的高阶时空交互;随后,模型利用时空感知的分解机制将交通序列显式拆分为趋势项和季节项,并通过编码器–解码器架构
论文简介:这篇论文提出了一种 时空感知的趋势–季节性分解网络(STDN) 用于交通流预测,针对现有方法在时空建模和序列分解方面存在的不足,联合建模交通数据中的空间依赖、时间周期性以及趋势与季节性结构。该方法通过引入时空嵌入来刻画时间周期特征与路网空间结构,并在此基础上学习动态关系图以捕捉节点间的高阶时空交互;随后,模型利用时空感知的分解机制将交通序列显式拆分为趋势项和季节项,并通过编码器–解码器架构进行预测。实验结果表明,STDN 在多个真实交通数据集上均优于现有主流方法,在保证较低计算开销的同时显著提升了预测精度,验证了时空嵌入驱动的分解建模在交通预测任务中的有效性。
1. 引言(Introduction)
1.1 研究背景
随着智能交通系统(Intelligent Transportation Systems, ITS)的不断发展,大规模交通传感器被广泛部署于城市与高速路网中,用于持续采集交通流量、速度等关键时序数据。基于历史交通数据对未来交通状态进行准确预测,是交通调度优化、拥堵缓解与公共安全保障的重要基础。然而,交通流数据通常同时具有显著的空间相关性与时间动态性,其复杂的时空依赖结构为高精度预测带来了巨大挑战。
1.2 问题与挑战
尽管近年来基于深度学习的时空预测方法取得了显著进展,但现有交通流预测模型在刻画复杂时空依赖结构方面仍存在若干不足。首先,在空间建模方面,许多方法依赖于基于道路拓扑或物理距离构建的静态图结构,难以刻画交通节点之间随时间变化的高阶交互关系,从而限制了模型对全局空间动态的表达能力。其次,在时间建模方面,虽然部分模型通过引入周期性特征或注意力机制来捕捉时间依赖,但往往未能显式区分不同时间尺度下的趋势变化与周期波动,导致对交通序列内在结构的建模不够充分。
此外,近年来趋势–季节性分解被证明能够有效提升时间序列预测性能,但现有分解方法多针对单节点时间序列进行设计,忽略了交通网络中不同节点在空间与时间维度上的差异性与关联性。这种将分解过程与时空建模相互割裂的方式,难以充分发挥分解建模在复杂交通场景中的潜力。因此,如何在统一框架下联合建模交通流的动态空间关系、时间周期特性以及趋势–季节性结构,仍然是交通流预测领域面临的重要挑战。
2. 模型架构(Model Architecture)
2.1 整体框架概述
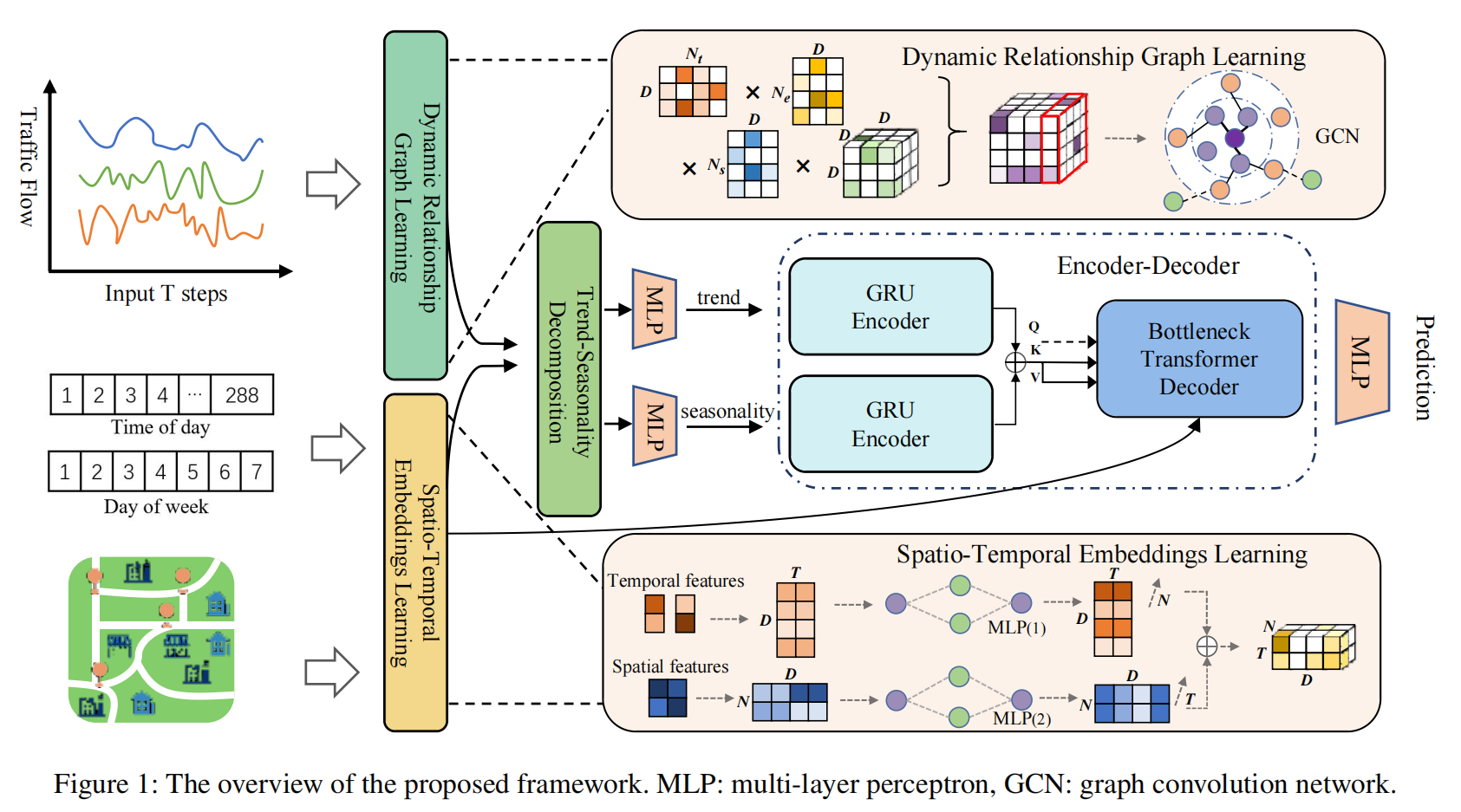
为了联合刻画交通流数据中的动态空间依赖、时间周期特性以及趋势–季节性结构,本文采用一种端到端的时空预测框架,其整体架构如图所示。模型以历史交通流序列及道路网络结构作为输入,通过多个相互协同的功能模块逐步提取和增强时空特征,最终输出未来时刻的交通流预测结果。
具体而言,模型首先通过时空嵌入学习模块对时间周期信息与道路网络的空间结构进行编码,从而为后续建模提供具有先验意义的时空上下文表示。在此基础上,引入动态关系图学习机制,以刻画交通节点之间随时间变化的高阶交互关系,增强模型对全局空间动态的感知能力。随后,结合所学习到的时空嵌入信息,模型通过趋势–季节性分解模块将交通流表示显式拆分为趋势项与季节项,从而更有针对性地建模不同时间尺度下的变化模式。最后,分解后的表示被送入编码器–解码器结构进行时序建模与预测,生成未来多个时间步的交通流结果。
通过上述设计,模型在统一框架下实现了动态空间关系建模、时空感知的序列分解以及高效的时序预测,有效缓解了传统方法在时空建模与结构表达方面的局限。
2.2 关键模块设计
2.2.1 时空嵌入学习模块(Spatio-Temporal Embedding Learning)
交通流数据在时间维度上通常呈现出显著的周期性特征,例如日周期与周周期;在空间维度上,不同交通节点则受到其在路网中所处位置及拓扑结构的影响。为显式刻画上述时空先验信息,模型首先引入时空嵌入学习模块,对时间周期特征与道路网络空间结构进行统一编码。
在时间维度上,模型利用时间片对应的“时刻”和“星期”信息构建时间特征,并通过嵌入映射将离散的时间标识转化为连续的向量表示,从而使模型能够感知不同时间段之间的周期性差异。在空间维度上,模型基于道路网络的拉普拉斯矩阵提取节点的结构信息,并通过低维嵌入形式刻画各交通节点在全局路网中的相对位置关系。随后,时间嵌入与空间嵌入被映射到统一的特征空间,并融合生成时空感知嵌入表示,用以刻画不同节点在不同时刻所对应的时空上下文。
通过引入时空嵌入,模型在后续建模过程中能够在数据驱动学习之外,引入具有明确物理和语义意义的先验信息,为动态关系建模和序列分解提供有效的引导。
2.2.2 动态关系图学习模块(Dynamic Relationship Graph Learning)
在交通预测任务中,交通节点之间的空间依赖关系不仅受道路拓扑结构的影响,还会随着时间和交通状态的变化而动态调整。传统基于固定邻接矩阵的图建模方法难以刻画这种随时间演化的高阶空间交互关系。为此,模型引入动态关系图学习模块,以自适应的方式建模不同时间片下交通节点之间的动态关联。
该模块通过学习节点嵌入和时间嵌入之间的交互关系,构建随时间变化的动态邻接矩阵,从而在不同时间步刻画交通节点之间的潜在联系。与仅依赖物理距离或静态拓扑的图结构不同,所学习的动态关系图能够捕捉到更丰富的全局空间依赖,使得模型在空间维度上具备更强的表达能力。在此基础上,模型利用动态图卷积操作对交通节点特征进行信息聚合,从而在每个时间步整合来自不同节点的动态空间信息。
通过动态关系图学习,模型能够突破静态图结构的限制,更有效地刻画交通网络中随时间变化的空间交互模式,为后续趋势–季节性分解与时序预测提供更加准确的空间表征。
2.2.3 时空感知的趋势–季节性分解模块(Spatio-Temporal Aware Trend–Seasonality Decomposition)
交通流时间序列通常同时包含长期变化趋势与周期性波动模式,对不同成分进行显式建模有助于提升预测性能。然而,现有分解方法大多针对单变量时间序列进行设计,忽略了交通网络中不同节点在时间与空间维度上的差异性与关联性。为解决这一问题,模型在前述时空嵌入与动态空间表征的基础上,引入时空感知的趋势–季节性分解模块,对交通流表示进行结构化拆分。
该模块利用时空嵌入所提供的上下文信息,对交通节点在不同时刻的表示进行引导式分解。具体而言,模型根据节点的时空上下文信息提取与时间位置和空间位置强相关的趋势成分,并将剩余部分视为刻画周期性和局部波动的季节性成分。通过这种方式,模型能够在统一的时空框架下,对不同节点、不同时刻的交通流变化模式进行差异化建模。
通过引入时空感知的分解机制,模型不仅避免了对交通序列进行粗粒度或静态分解,还使趋势与季节性成分在空间和时间维度上具备明确的语义约束,从而为后续的时序建模提供更加结构化和可解释的输入表示。
3. 实验结果与分析(Experiments and Analysis)
3.1 实验设置
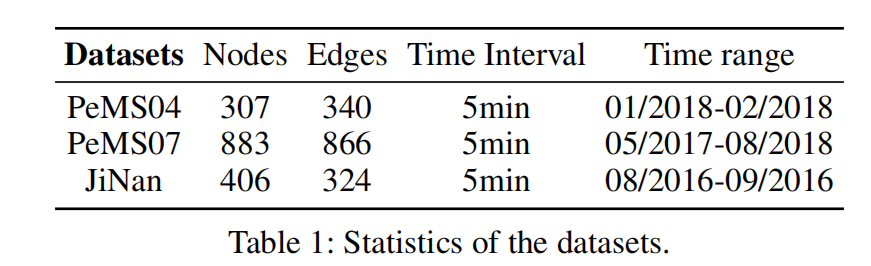
为全面评估所提出模型的预测性能,本文在多个真实交通流数据集上进行了系统实验。所使用的数据集涵盖不同规模和结构的交通网络,能够反映多样化的交通运行场景。各数据集均按照统一的时间间隔采样,并包含连续的历史交通流观测序列。
在实验设置中,模型以固定长度的历史时间序列作为输入,用于预测未来多个时间步的交通流变化。为保证结果的可比性,所有对比方法均采用相同的数据划分策略,将数据集划分为训练集、验证集和测试集。模型性能通过多种常用评价指标进行衡量,包括平均绝对误差(MAE)、均方根误差(RMSE)以及平均绝对百分比误差(MAPE),以从不同角度反映预测精度。
在实现层面,所有模型均在相同的实验环境下进行训练与测试,并采用一致的优化策略与早停机制以避免过拟合。相关超参数通过验证集进行选择,从而确保实验结果能够客观反映不同方法在交通流预测任务中的实际表现。
3.2 性能对比结果
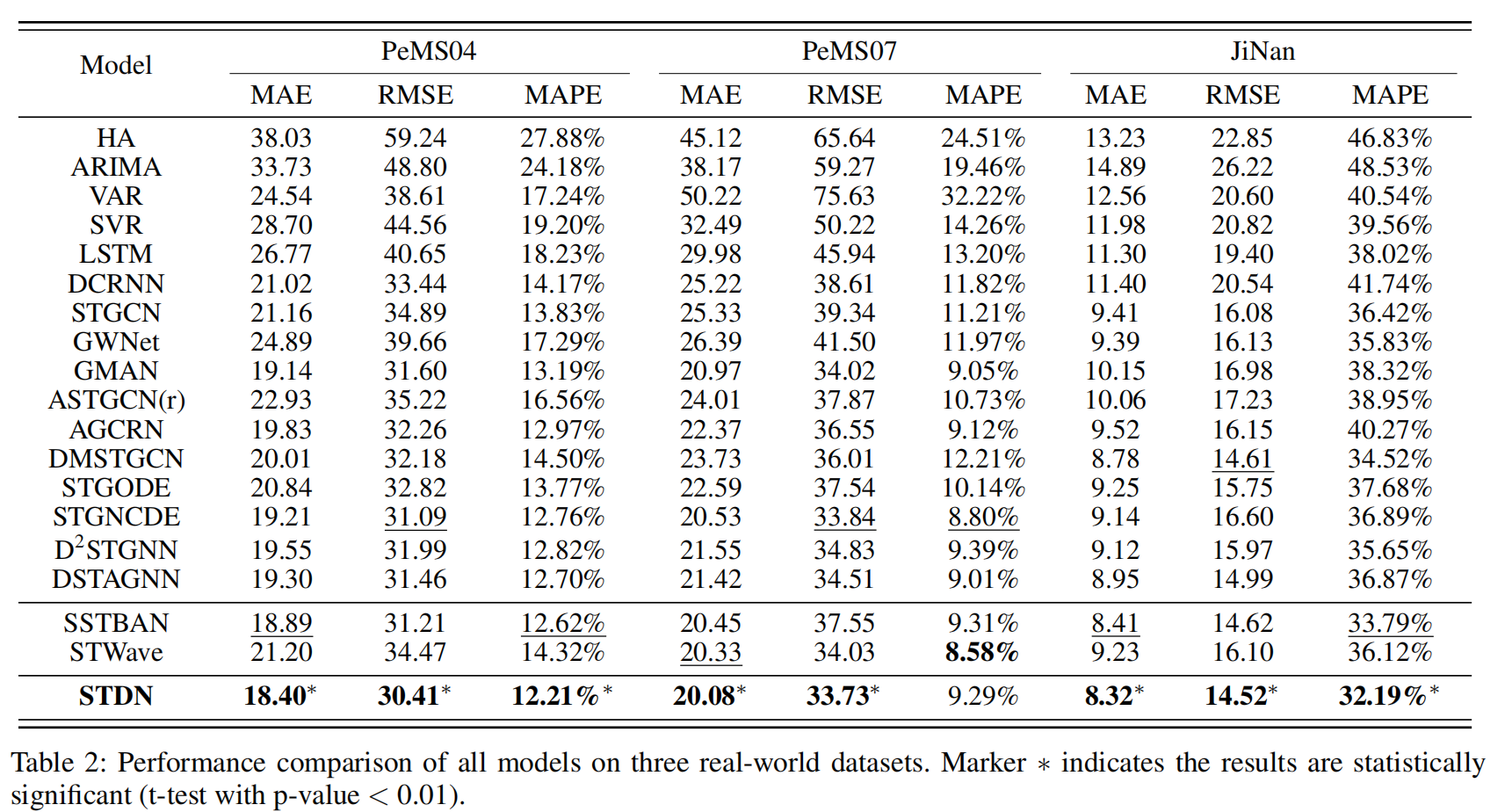
为验证所提出模型在交通流预测任务中的有效性,本文将其与多种代表性基线方法进行了对比实验,包括传统时间序列模型、基于循环神经网络的方法以及近年来提出的主流时空图神经网络模型。各方法在相同实验设置和评价指标下进行测试,以确保对比结果的公平性。
实验结果表明,所提出模型在多个数据集和不同预测指标上均取得了最优或次优的性能表现。相较于传统时间序列方法,基于深度学习的模型整体表现出更强的预测能力,验证了深度模型在刻画复杂非线性时空关系方面的优势。进一步地,与现有时空图神经网络方法相比,本文模型在预测精度上仍具有稳定提升,尤其在中长期预测场景下表现更为显著。
上述结果表明,通过联合建模动态空间关系、时间周期特性以及趋势–季节性结构,模型能够更充分地捕捉交通流数据中的关键变化模式,从而在复杂交通场景中实现更为准确和稳健的预测。
3.3 消融实验与分析
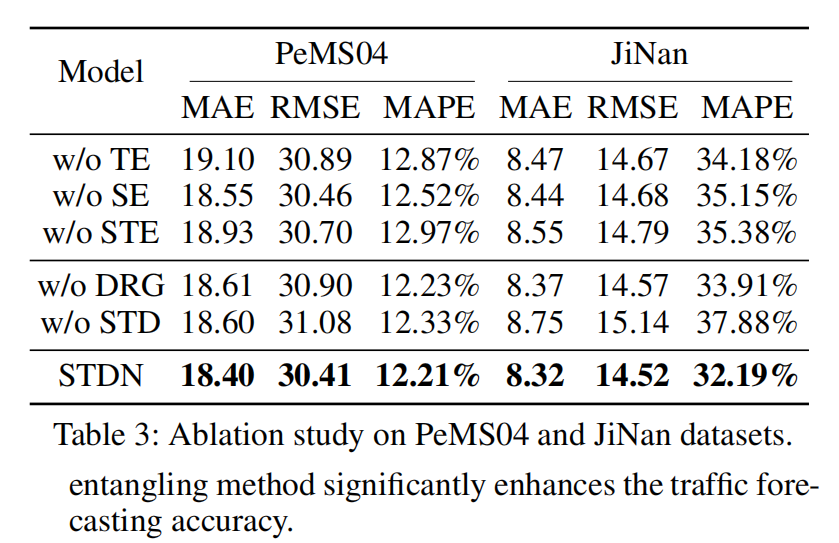
为进一步分析模型中各组成模块的作用,本文设计了一系列消融实验,对模型的关键组件进行逐一移除或替换,并在相同实验设置下评估其预测性能变化。通过对比不同变体模型的实验结果,可以更清晰地理解各模块对整体性能的贡献。
实验结果显示,当移除时空嵌入学习模块或动态关系图学习模块时,模型的预测性能均出现不同程度的下降,表明显式引入时间周期信息和动态空间依赖对于准确建模交通流具有重要作用。特别地,去除动态关系图后,模型在部分数据集上的性能下降更为明显,说明动态图结构在捕捉交通节点间高阶空间交互方面具有不可替代的作用。
此外,当将时空感知的趋势–季节性分解模块替换为不考虑时空上下文的分解方式时,模型性能同样出现明显退化。这一结果验证了在交通网络场景下,将序列分解过程与时空信息紧密结合,有助于提升模型对复杂交通模式的刻画能力。
3.4 参数敏感性与模型稳定性分析
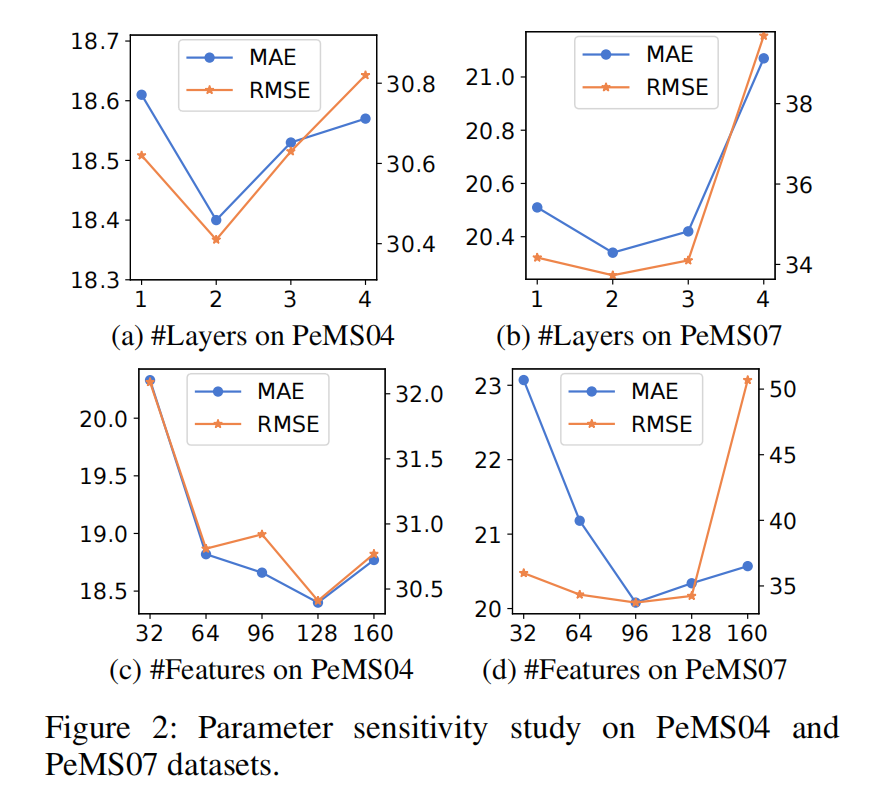
为评估模型对关键超参数设置的敏感性,本文进一步分析了解码器层数以及特征维度对预测性能的影响。如图 2 所示,在不同参数配置下,模型的预测误差整体变化较为平滑,表明所提出方法对超参数设置具有较好的稳定性。随着解码器层数的增加,模型性能在一定范围内逐步提升并趋于稳定,说明模型在捕捉复杂时空模式时并不依赖过深的结构。同时,特征维度在适当范围内的增加有助于提升模型表达能力,但过高的维度可能引入冗余信息,从而导致性能轻微下降。
3.5 计算效率与训练行为分析
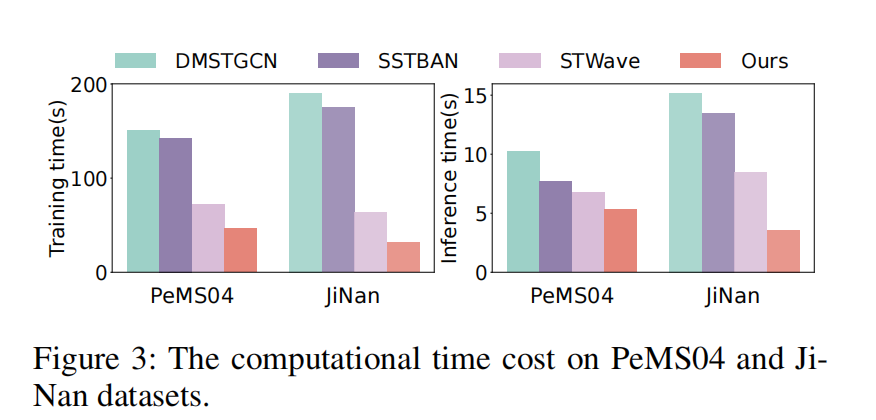
在保证预测精度的同时,模型的计算效率也是实际应用中需要考虑的重要因素。如图 3 所示,本文方法在训练时间和推理时间上均优于部分性能相近的基线模型,表明所提出的框架在建模能力与计算开销之间取得了较好的平衡。这一优势主要得益于模型在结构设计上的简化以及对时空特征的高效建模方式。
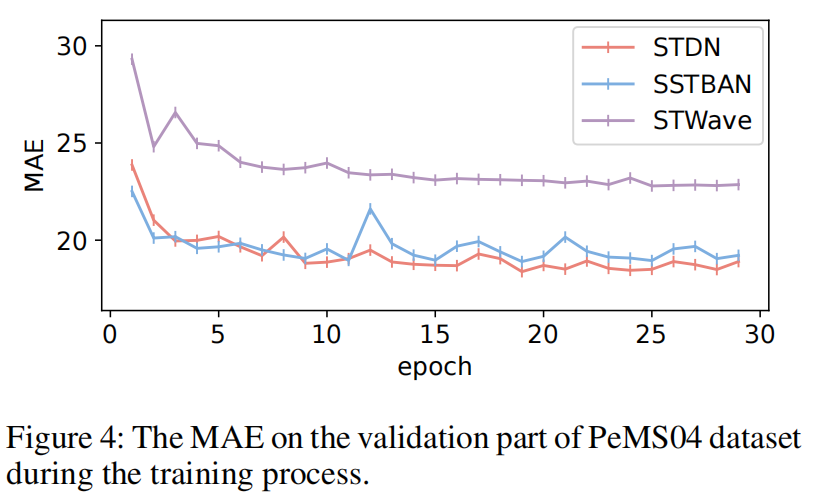
此外,图 4 展示了模型在验证集上的训练过程变化情况。可以观察到,本文模型在较少的训练轮数内即可达到稳定性能,相较于对比方法具有更快的收敛速度。这一现象表明,通过引入结构化的时空建模与趋势–季节性分解机制,模型在训练过程中能够更高效地学习交通流的关键模式。
3.6 结果讨论
综合性能对比、消融实验以及参数敏感性与效率分析的结果,可以对本文方法的整体表现形成更为全面的认识。首先,在预测精度方面,模型在多个数据集和评价指标上均取得了稳定且一致的性能提升,表明联合建模动态空间关系、时间周期特性以及趋势–季节性结构,有助于更充分地捕捉交通流数据中的关键变化模式。这一结果验证了本文在模型架构层面所做设计选择的合理性。
从消融实验与参数敏感性分析可以进一步观察到,模型的性能提升并非依赖于某一单一模块或特定超参数配置,而是源于各模块在统一框架下的协同作用。时空嵌入为模型提供了具有先验意义的上下文信息,动态关系图学习增强了对复杂空间交互的建模能力,而时空感知的趋势–季节性分解则有效提升了模型对多尺度时间模式的刻画能力。同时,模型在较宽的参数取值范围内均能保持相对稳定的性能,说明其对超参数设置具有较好的鲁棒性。
此外,计算效率与训练行为分析表明,本文方法在取得较高预测精度的同时,并未引入过高的计算开销。模型在训练和推理阶段均表现出较为理想的时间效率,并且能够在较少的训练轮数内实现稳定收敛。这一特性对于实际交通系统中的在线预测或大规模部署具有重要意义。
综合来看,实验结果从预测性能、模型稳定性以及计算效率等多个角度验证了本文方法的有效性与实用性,表明该模型不仅在理论建模层面具有优势,同时也具备在真实交通场景中应用的潜力。
4. 总结与展望(Conclusion and Future Work)
4.1 工作总结
本文围绕交通流预测任务中复杂的时空依赖建模问题,系统介绍了一种时空感知的趋势–季节性分解网络。该方法在统一框架下融合了时间周期建模、动态空间关系学习以及结构化序列分解机制,能够更充分地刻画交通流数据在时间与空间维度上的内在特性。
通过引入时空嵌入,模型显式建模交通节点在不同时间和空间位置下的上下文信息;借助动态关系图学习机制,模型进一步增强了对全局空间交互关系的表达能力;在此基础上,时空感知的趋势–季节性分解有效提升了对多尺度时间变化模式的建模效果。大量实验结果表明,该方法在多个真实交通数据集上均取得了优于现有主流方法的预测性能,验证了所提出框架在交通流预测任务中的有效性与实用性。
4.2 未来工作
尽管本文方法在多个交通流预测场景中取得了较为理想的效果,但仍存在一些有待进一步研究的方向。
首先,在模型层面,当前方法在动态图结构学习和时空嵌入构建过程中仍引入了一定的计算开销,如何在保持预测性能的同时进一步提升模型效率,是未来值得关注的问题。
其次,在建模假设方面,本文主要依赖固定形式的时间周期信息与预定义的空间结构先验,对于突发事件、异常交通状况或结构发生显著变化的路网场景,其适应能力仍有提升空间。未来可以考虑引入更加自适应的时间建模机制或外部辅助信息,以增强模型在复杂真实场景下的鲁棒性。
最后,在应用层面,本文方法目前主要针对交通流预测任务进行验证,未来有望将该框架拓展至交通速度预测、拥堵检测以及其他时空序列建模任务,从而进一步验证其在更广泛时空预测场景中的通用性。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 19
19 0
0- 0



 已为社区贡献33条内容
已为社区贡献33条内容

所有评论(0)