micro_ros_agent在DDS通信中起到什么作用?中
micro_ros_agent是DDS与XRCE-DDS之间的协议代理/中间件桥,属于DDS/ROS2中间件层而非传输层。它充当MCU与ROS2世界的翻译中转站,将MCU的简化DDS消息转换为完整DDS消息,底层可使用串口/UDP/TCP等传输方式。其核心功能是资源管理和协议转换,相当于边境口岸+翻译官+物流分拣中心的复合角色,使资源受限的MCU能够接入ROS2/DDS生态系统。
一句话结论(先定性)
micro_ros_agent 不是 UDP / TCP
它是“翻译 + 中转 + 代理”,属于 DDS / ROS 2 这一层
它用 UDP / TCP / 串口作为底层通道,
但它本身不是传输层。
把它放回你那套比喻里(非常重要)
你现在的比喻是:
DDS / MAVROS:交流体系
MAVLink:语言
TCP / UDP:物流规则
串口 / 以太网:道路
那么:
🔑 micro_ros_agen
二、micro_ros_agent 到底干了什么?
我们一步一步看你图里的真实问题背景。
现实问题(这是 micro-ROS 诞生的原因)
ROS 2 / DDS:
需要内存
需要动态分配
需要网络
MCU / 飞控:
内存小
没 Linux
没完整 IP 网络
👉 MCU 根本跑不了“完整 DDS”
三、micro-ROS 的解决方案(两端不对等)
架构本质(一定要记住)
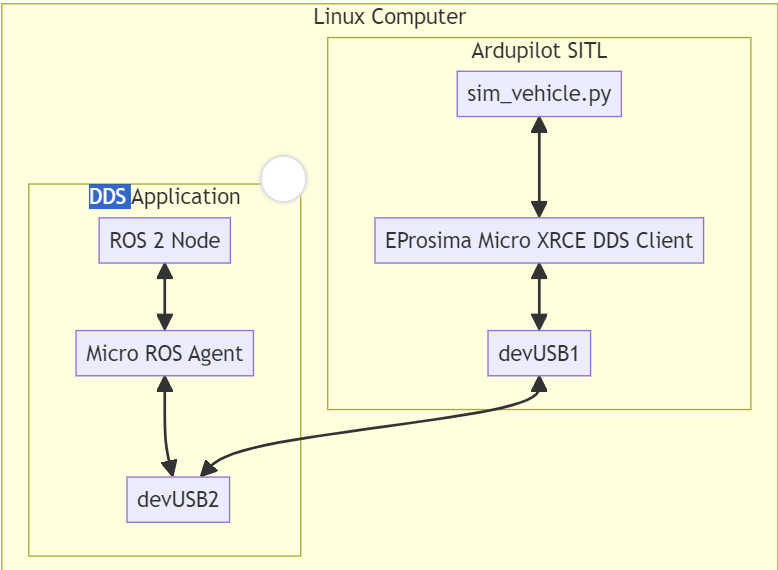
[ ROS 2 / DDS 世界 ] ←→ [ MCU / 裸机世界 ] ↑ ↑ micro_ros_agent micro XRCE DDS Client两边不是对等 DDS 节点。
四、对照你的图逐层解释
左边(Linux / ROS 2)
ROS 2 Node ↓ DDS ↓ micro_ros_agent👉 这里是完整 DDS 世界
右边(SITL / MCU 模拟)
Micro XRCE DDS Client ↓ devUSB1👉 这里是精简 DDS(XRCE-DDS)
五、micro_ros_agent 是哪一层?(关键)
❌ 它不是:
❌ UDP
❌ TCP
❌ 串口
❌ 物理层
✅ 它是:
DDS ↔ XRCE-DDS 的“协议代理 / 中间件桥”
准确说:
角色 micro_ros_agent 所属层级 DDS / 中间件层 功能 翻译、代理、资源管理 面向对象 MCU(micro DDS client) 使用的“路” 串口 / UDP / TCP(都可以)
六、那 UDP / TCP 在哪里?
👉 UDP / TCP 是 micro_ros_agent“脚下踩的路”
在你的图中:
micro_ros_agent ↓ devUSB2 ← 串口(物理道路)如果换成网络:
micro_ros_agent ↓ UDP / TCP ↓ Ethernet📌 agent 用 UDP/TCP
📌 但 agent ≠ UDP/TCP
七、用一句话解释 micro_ros_agent(工程版)
micro_ros_agent 是“替 MCU 跑 DDS 的代理”,
它把 MCU 的简化 DDS 消息,
翻译成 ROS 2 世界能理解的 DDS 消息。
八、用“寄信”比喻再对一次(强化理解)
比喻角色 实际 村里写信的人 micro XRCE DDS Client(MCU) 村口邮局 micro_ros_agent 国家邮政系统 DDS / ROS 2 乡村土路 串口 高速公路 Ethernet 物流规则 UDP / TCP 👉 micro_ros_agent 就是“村口邮局”
👉 没它,村里的信进不了国家系统
九、你图里唯一需要“纠正理解”的点
不是:
ROS 2 Node → micro_ros_agent → 串口 → DDS
而是:
ROS 2 Node ⇄ DDS ⇄ micro_ros_agent ⇄ 串口 ⇄ micro XRCE DDS client
agent 是 DDS 世界的一部分,不是传输层。
十、最终一句“定海神针”
UDP / TCP 是“怎么送”
micro_ros_agent 是“谁来代送、谁来翻译、谁来登记”t = 边境口岸 + 翻译官 + 物流分拣中心

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 19
19 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)