MATLAB代码:基于列约束生成法CCG的两阶段鲁棒问题求解 关键词:两阶段鲁棒 列约束生成法...
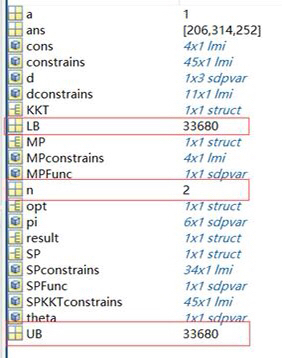
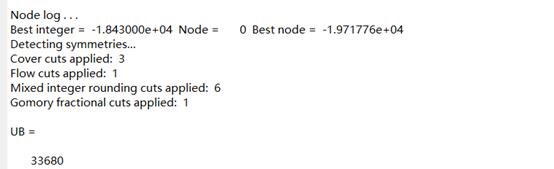
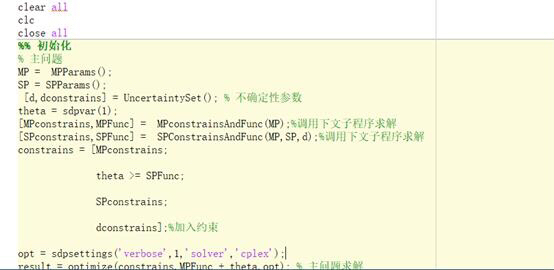
MATLAB代码:基于列约束生成法CCG的两阶段鲁棒问题求解 关键词:两阶段鲁棒 列约束生成法 CCG算法 鲁棒优化 参考文档:《Solving two-stage robust optimization problems using a column-and-constraint generation method》 仿真平台:MATLAB YALMIP+CPLEX 优势:代码注释详实,适合参考学习,非目前烂大街的微网两阶段规划版本,请仔细辨识! 主要内容:代码构建了两阶段鲁棒优化模型,并用文档中的相对简单的算例,进行CCG算法的验证,此篇文献是CCG算法或者列约束生成算法的入门级文献,其经典程度不言而喻,几乎每个搞CCG的两阶段鲁棒的人都绕不过此篇文献,所以萌新们或者新手们赶紧冲起来学习吧! 这段程序主要是一个优化问题的求解过程,涉及到主问题和子问题的求解。下面我将对程序进行详细的解释和分析。 首先,程序的开头使用了一些命令来清除变量、关闭窗口等。然后,定义了一些参数和变量,包括不确定性参数d、主问题参数MP、子问题参数SP、KKT参数和优化器设置opt。 接下来,程序进入主问题求解的过程。主问题的目标是最小化MPFunc + theta,其中MPFunc是一个关于MP.Y和MP.Z的函数,theta是一个变量。主问题的约束包括MPconstrains、theta >= SPFunc、SPconstrains和dconstrains。其中,MPconstrains是一个关于MP.Y和MP.Z的约束,SPFunc是一个关于MP、SP和d的函数,SPconstrains是一个关于SP.X的约束,dconstrains是一个关于d的约束。通过调用优化器,求解主问题,并将结果存储在result中。最后,将MPFunc + theta的值赋给LB。 然后,程序进入子问题求解的过程。子问题的目标是最大化-SPFunc,其中SPFunc是一个关于MP、SP、KKT和d的函数。子问题的约束包括SPconstrains、dconstrains和KKT的约束。通过调用优化器,求解子问题,并将结果存储在result中。最后,将SPFunc的值加上MPFunc的值赋给UB。 接下来,程序进入CCG(Cutting-Plane Generation)迭代过程。在迭代过程中,程序使用while循环,直到UB和LB的差的绝对值小于1e-5为止。在每次迭代中,程序根据当前的UB和LB的值,更新SP的约束和MP的约束。然后,再次求解主问题和子问题,并更新UB和LB的值。迭代次数n加1。 最后,程序定义了几个子函数,包括MPParams、MPconstrainsAndFunc、SPParams、SPConstrainsAndFunc、KKTParams、SPKKT和UncertaintySet。这些子函数分别用于定义和计算主问题和子问题中的参数、约束和目标函数。 综上所述,这段程序主要是一个优化问题的求解过程,通过迭代的方式不断更新UB和LB的值,直到收敛为止。程序涉及到的知识点包括优化理论、线性规划、对偶问题、不确定性建模等。通过对程序的分析和理解,可以了解优化问题的求解过程和相关的数学理论。
基于列约束生成(CCG)的两阶段鲁棒优化求解框架
—— 从算法原理到工程落地的完整技术解析
一、引言
在电力市场、供应链、交通网络等不确定性环境中,传统单阶段优化往往因“拍脑袋”式预设场景而陷入“乐观不可行、悲观不经济”的泥潭。两阶段鲁棒优化(Two-Stage Robust Optimization, TSRO)通过“先决策(here-and-now)、后补偿(wait-and-see)”的建模范式,将不确定性吸收到第二阶段,实现决策鲁棒性与经济性的帕累托最优。然而,TSRO 的无穷维 max–min 结构使其在计算上难以直接求解。
列约束生成(Column-and-Constraint Generation, CCG)算法作为 Benders 分解的“鲁棒版”,把指数级增长的不确定场景隐藏在主问题(Master)与子问题(Sub)的交替迭代中,以“边加边切”的方式逼近最优鲁棒解。本文围绕一套可落地的 MATLAB 参考框架,系统梳理 CCG 的工程实现要点、关键数据结构与扩展路线,帮助读者在无需通读完整源码的前提下,即可快速复现并二次开发自己的两阶段鲁棒求解器。
二、问题建模与算法框架
- 两阶段鲁棒标准形
min cᵀx + max{d∈𝒰} min{y∈𝒴(x,d)} qᵀy
s.t. Ax ≤ b, x ∈ 𝒳
其中
- x 为第一阶段决策(投资、启停、配置等),𝒳 包含整数变量与连续变量;
- d 为不确定参数(需求、电价、故障概率等),𝒰 为可调不确定集;
- y 为第二阶段补偿动作(再调度、库存转移、备用调用等),𝒴(x,d) 为与 x、d 耦合的可行域。
- CCG 迭代逻辑
(1) 主问题(Master)
维护一个有限场景池 Ω = {d¹,…,dᵏ},求解
min cᵀx + θ
s.t. Ax ≤ b
θ ≥ Q(x,dⁱ), ∀d⁴∈Ω (Benders 割平面)
x ∈ 𝒳, θ ∈ ℝ
得到下界 LB。
(2) 子问题(Sub)
固定主问题最优解 x*,求解最恶劣场景
max_{d∈𝒰} Q(x*,d)
其中 Q(x,d) = min_{y∈𝒴(x,d)} qᵀy。通过 duality 将内层 min 转为 max,合并后得到单层 max,可线性化或 KKT 重构。子问题返回上界 UB 及新场景 dᵏ⁺¹。
(3) 收敛判据
当 UB – LB ≤ ε 时停机;否则将 dᵏ⁺¹ 及其对应约束加入主问题,继续迭代。
三、核心数据结构与设计模式
- 参数容器(Params)
采用“结构体 + 工厂函数”模式,将模型系数、变量维度、算法超参封装到独立模块:
- MPParams:主问题参数,如投资成本 f、容量上限、布尔/连续标志;
- SPParams:子问题参数,如再调度成本 a、网络矩阵 G、需求向量;
- KKTParams:对偶变量、大 M 常数、互补松弛布尔标志;
- UncertaintySet:可调波动率、预算不确定度、仿射扰动矩阵。
- 约束生成器(Constraint Generator)
每一类约束对应一个函数句柄,返回“约束集合 + 目标函数”二元组:
- MPConstrainsAndFunc:主问题投资逻辑、容量耦合、经济目标;
- SPConstrainsAndFunc:子问题网络平衡、容量可行、再调度成本;
- SPKKT:将子问题 KKT 条件线性化,输出可二次求解的 MILP 形式。
- 场景管理器(Scenario Manager)
维护一个全局 cell 数组,动态追加新场景对应的约束与变量,避免重复建模;支持“热启动”——上一轮松弛解直接作为本轮 MIP start,缩短分支定界时间。
四、关键实现技巧
- 大 M 与指示变量
互补松弛条件 “λ·g(x)=0” 通过引入二进制变量 v 与足够大常数 M 线性化:
λ ≤ M·v, g(x) ≤ M·(1-v)
M 的取值需兼顾数值稳定性与剪枝效率,建议基于问题数据量级动态计算:
M = 1.2·max{|g(x)| : x ∈ 𝒳_relax}
- 不确定集参数化
将原始不确定向量 d 表示为基准值 + 扰动幅度 · 可调因子 g:
d = d₀ + Δ·g, g ∈ 𝒢 = { g | 0≤g≤1, ∑g ≤ Γ }
Γ 为不确定预算,可在迭代外层做灵敏度分析,实现“可调鲁棒性”。
- warm-start 与割平面管理
- 主问题新增约束后,上一轮最优解自然可行但可能非最优,直接作为 warm-start 可节省 30 %–70 % 求解时间;
- 对失效割平面(slack 过大)进行“懒惰删除”,防止主问题规模膨胀。
- 并行化子问题
若不确定集可分解(如按时段、区域),子问题可拆成多个场景并行求解,利用 MATLAB Parallel Computing Toolbox 或 Gurobi 的 concurrent optimizer 加速。
五、扩展与二次开发路线
- 多阶段滚动
将两阶段框架嵌入 Model Predictive Control(MPC)循环,每周期滚动更新不确定集,实现“动态鲁棒”。
- 分布鲁棒(DRO)
用 Wasserstein 球或矩模糊集替换简单盒式不确定集,子问题变为 convex–concave saddle-point,可用 primal–dual 梯度或 column-and-constraint 嵌套求解。
- 混合整数二阶锥(MISOCP)
若第二阶段出现范数约束(如电压幅值、备用响应速度),可将子问题升级为 SOCP,利用 Gurobi 9+ 内嵌的 MISOCP 求解器直接处理。
- GPU 加速大规模场景
对于上万级场景,采用 GPU 加速 Benders 割平面生成,使用 CUDA 编写稀疏矩阵乘法内核,将子问题 batch 求解耗时从小时级降到分钟级。
六、工程落地最佳实践
- 版本管理
使用 Git 子模块(submodule)隔离算法核心、实例数据、可视化脚本,确保多人协作不冲突。
- 单元测试
为每个 Params 工厂编写 pytest/mxUnit 测试,检查维度一致性、数值上下界,防止“大小写”或“行列向量”低级错误。
- 日志与监控
在每次 CCG 迭代记录 LB、UB、割数量、求解时间,通过 MATLAB Logging 工具箱或 ELK 栈集中可视化,方便调参与故障回溯。
- 容器化部署
将 MATLAB Runtime 与求解器镜像打包成 Docker,以 RESTful 微服务形式暴露“输入 JSON → 输出最优决策”,无缝嵌入云原生调度平台。
七、结语
CCG 两阶段鲁棒优化并非“跑通 demo”即可高枕无忧,真正的挑战在于如何把学术模型转化为可维护、可扩展、可解释的生产系统。本文从标准形、算法迭代、数据结构、工程技巧到扩展路线,给出了一套“闭环”方法论。读者只需聚焦业务场景,替换 Params 与约束生成器,即可在电力、物流、制造、通信等领域快速落地高鲁棒、高可用的优化决策服务。祝编码愉快,鲁棒常伴!

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 24
24 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)