PNAS:神经形态机器人电子皮肤
机器人技术的进步需要类似人类皮肤的复杂触觉感知能力,这种感知能力具有多重感知和保护功能。目前的机器人电子皮肤设计较为简单,仅提供压力感知等基本功能。香港城市大学于欣格团队开发的神经形态机器人电子皮肤(NRE-skin)采用分层式、神经启发式架构,能够实现高分辨率触觉感知、利用局部反射主动检测疼痛和损伤,以及模块化快速修复。这种设计显著提升了机器人的触觉、安全性和人机交互的直观性,使其成为更具同理心的服务型机器人的理想选择。为了与人类进行富有同理心的近距离互动,人们对具备先进感知能力的人形机器人的需求日益增长。电子皮肤(E-skin)是实现这种触觉感知的关键技术。然而,目前的电子皮肤仅限于基本的触觉感知,且电路结构较为简单。本文介绍了一种神经形态机器人电子皮肤(NRE-skin),它不仅提供基本的触觉感知,还集成了主动疼痛和损伤检测等高级功能。NRE-skin 能够将动态触觉刺激编码成类似神经的脉冲序列,并具有主动疼痛检测功能,可触发保护性反射。此外,其损伤感知和模块化设计能够精确定位受损区域并快速更换受损皮肤。通过模拟人类的感知和保护系统,NRE-skin 有助于实现更自然、更安全的人机交互。近年来,借助传感器、图像处理和大型语言模型等技术的进步,具身智能人形机器人取得了显著发展。这些机器人可以行走、奔跑、跳跃,甚至可以利用手臂和手指执行类似于人类的复杂任务。传感技术的进步是关键,它赋予了这些机器人触觉感知能力。在人类中,皮肤是最大的感觉器官,能够感知丰富的触觉信息,用于基本的识别以及情感参与和自我保护反应等复杂功能。因此,电子皮肤(E-skin)备受关注,它可以安装在机器人上,被认为是先进机器人技术的关键。然而,目前的机器人电子皮肤(RE-skin)功能有限,仅限于压力感知和基于网格映射的位置识别等基本功能,缺乏信号处理的全面集成以及主动疼痛和损伤感知或局部反射等高级功能。大多数已报道的再生皮肤设计依赖于点对点(M×N 根导线,8×8 阵列需要 64 根导线)或 XY 网格(M+N 根导线,8×8 阵列需要 16 根导线)互连架构,这导致布线复杂度显著增加,并限制了其在大面积触觉传感中的可扩展性。此外,这些系统被动运行,利用中央单元处理的高频模拟信号来实现实时触觉定位和强度量化。相比之下,人类触觉感知涉及神经末梢主动产生神经冲动,编码触觉类型、位置和强度,并将其传递至中枢神经系统。这种层级结构有助于快速高效地进行触觉编码,从而产生动态的触觉感知。虽然一些开创性的研究探索了将模拟信号编码成脉冲序列进行传输的神经形态方法,但这些脉冲中嵌入的大量信息以及此类设计所实现的先进功能仍未得到充分探索。本文介绍了一种具有层级式、类神经感受野结构的神经形态再生皮肤(NRE 皮肤)。这种设计既能实现基础的压力感知,又能实现主动疼痛和损伤检测等高级功能(图 1A)。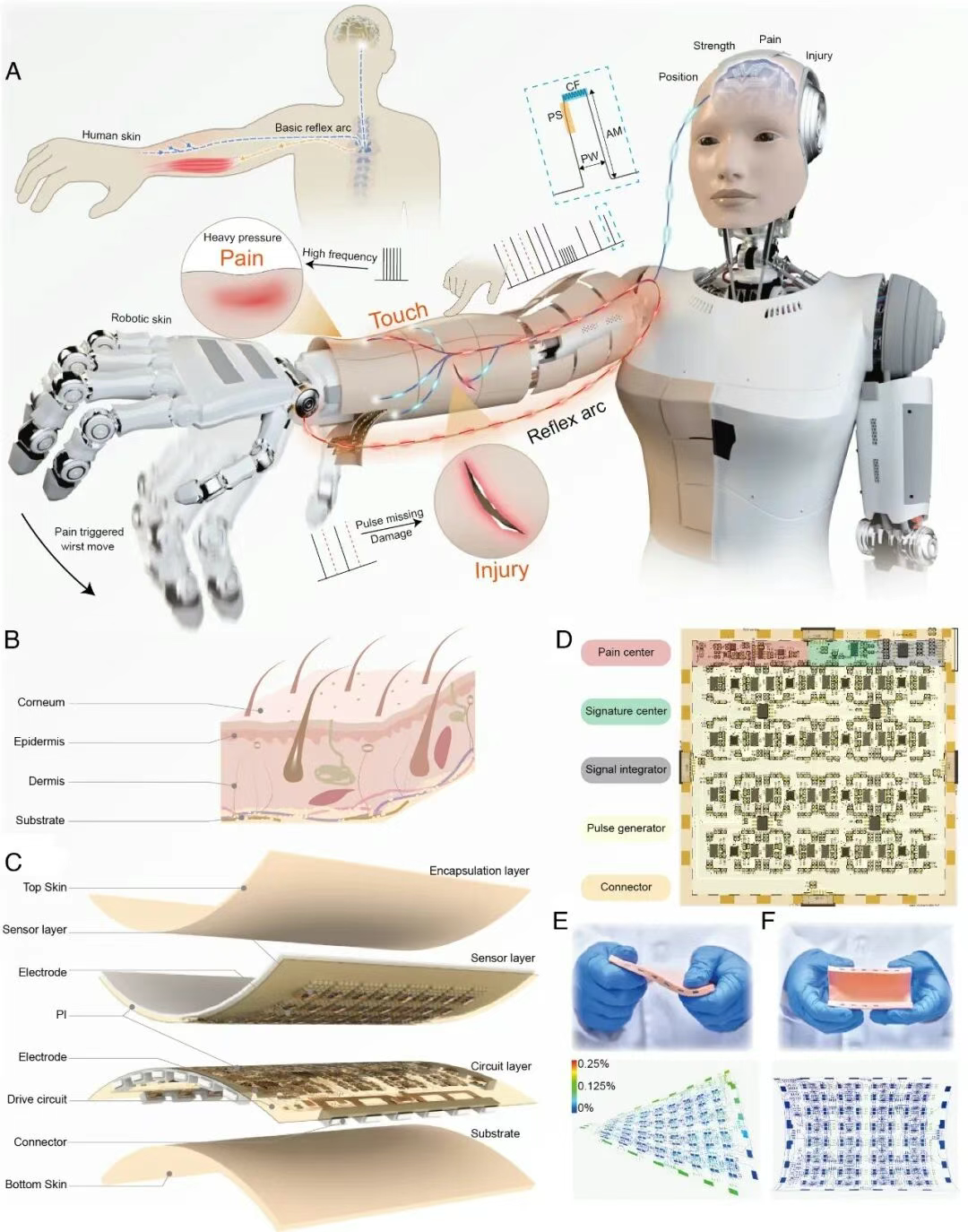
NRE 皮肤将外部触觉信息(包括强度和位置)转换为脉冲序列。利用其层级式架构,每个像素的信号都会经历逐步降维,在保留关键触觉信息的同时简化数据,最终整合到单个传输通道中,传输至处理中心。与现有电子皮肤不同,NRE 皮肤本身具有主动疼痛感知功能,能够自主响应过度刺激,触发类似于人类反射弧的局部运动反应。此外,它还能通过识别损伤位置并提供持续警报以进行自我检查,从而实现主动伤口检测。其类似乐高积木的快速释放设计便于快速更换受损区域。这项创新增强了机器人的触觉感知能力,为更直观的人机交互铺平了道路,推动了富有同理心的家庭助手的发展。图1 神经形态 NRE 皮肤系统。(A) 该 NRE 皮肤专为具身智能机器人设计,不仅提供基本的触觉感知,还具备主动疼痛感知、损伤检测、局部反射弧和快速组装等高级功能。(B 和 C) 基于这些功能,NRE 皮肤分为四层:封装层(角质层)、传感器层(表皮)、电路层(真皮)和基底。(D) 作为 NRE 皮肤核心的电路,在不同区域被设计成具有特定的功能。(E 和 F) NRE 皮肤在扭转和弯曲下的光学图像(上排)和有限元分析结果(下排)。NRE-Skin 的设计与架构从功能上看,人体皮肤主要由四层组成:角质层、表皮、真皮和皮下组织(图 1B)。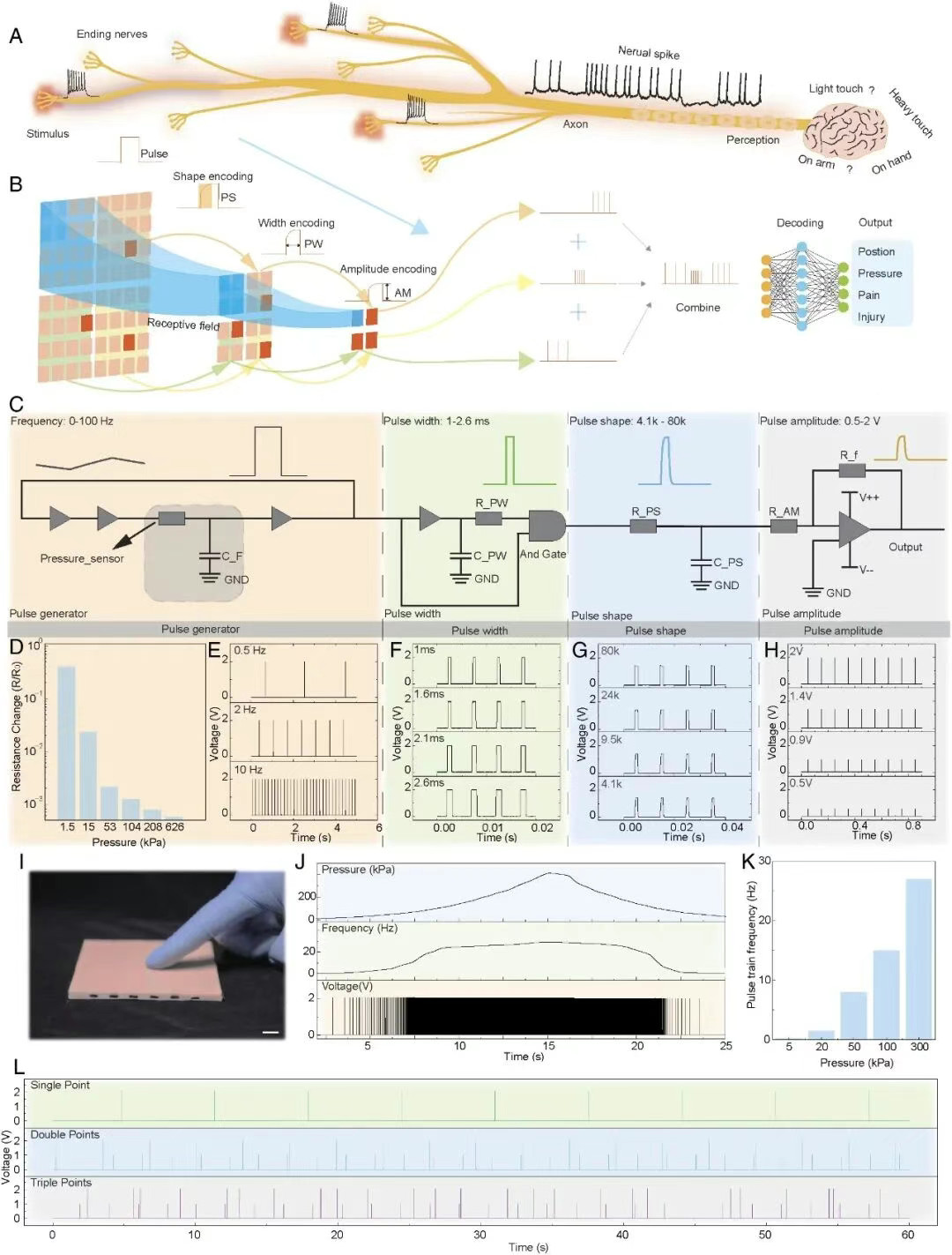
这些层中包含着一个复杂的感知系统,其中表皮和真皮中的多机械感受器以及分层神经感受野构成了一个整合的信息网络。该网络使人类能够感知外部刺激的强度和位置,这些刺激可分为基本刺激和复杂刺激。基本刺激,例如疼痛或轻触,通过脊髓反射弧快速处理,这些反射弧是无需大脑思考的自动反应。相比之下,更复杂的感知,例如刺激的程度、精确位置或损伤的检测,则会传递到大脑进行更深入的处理。受人体皮肤的启发,所提出的 NRE 皮肤采用四层结构:封装层、传感器层、电路层和基底(图 1C)。封装层模拟角质层提供保护,而基底模拟皮下组织,起到缓冲冲击力的作用。传感器层和电路层分别模拟人体的机械感受器和神经传导系统。传感器层响应外部刺激,由两个主要部分组成。第一部分是基于微结构的聚二甲基硅氧烷(PDMS)压力传感器阵列,其上覆盖有图案化的聚(3,4-乙烯二氧噻吩)聚苯乙烯磺酸盐(PEDOT:PSS)导电层。第二部分是电极层,用于连接压力传感器和下方的电路层(参见补充信息附录图 S1 和 S2)。在传感器层下方,电路层将压力刺激转换为脉冲序列,这些脉冲序列经由模拟生物感觉处理的人工感受野网络进行处理,最终到达主处理中心。作为 NRE 皮肤的核心,电路层分为五个区域:疼痛中心(用于评估疼痛信号)、特征中心(用于识别信号源皮肤)、信号积分器(用于合并输出信号)、脉冲发生器(用于生成脉冲序列)和连接器(用于连接外部皮肤)(图 1D 和 SI 附录图 S3 和 S4)。各功能的详细讨论见 SI 附录注释 S1。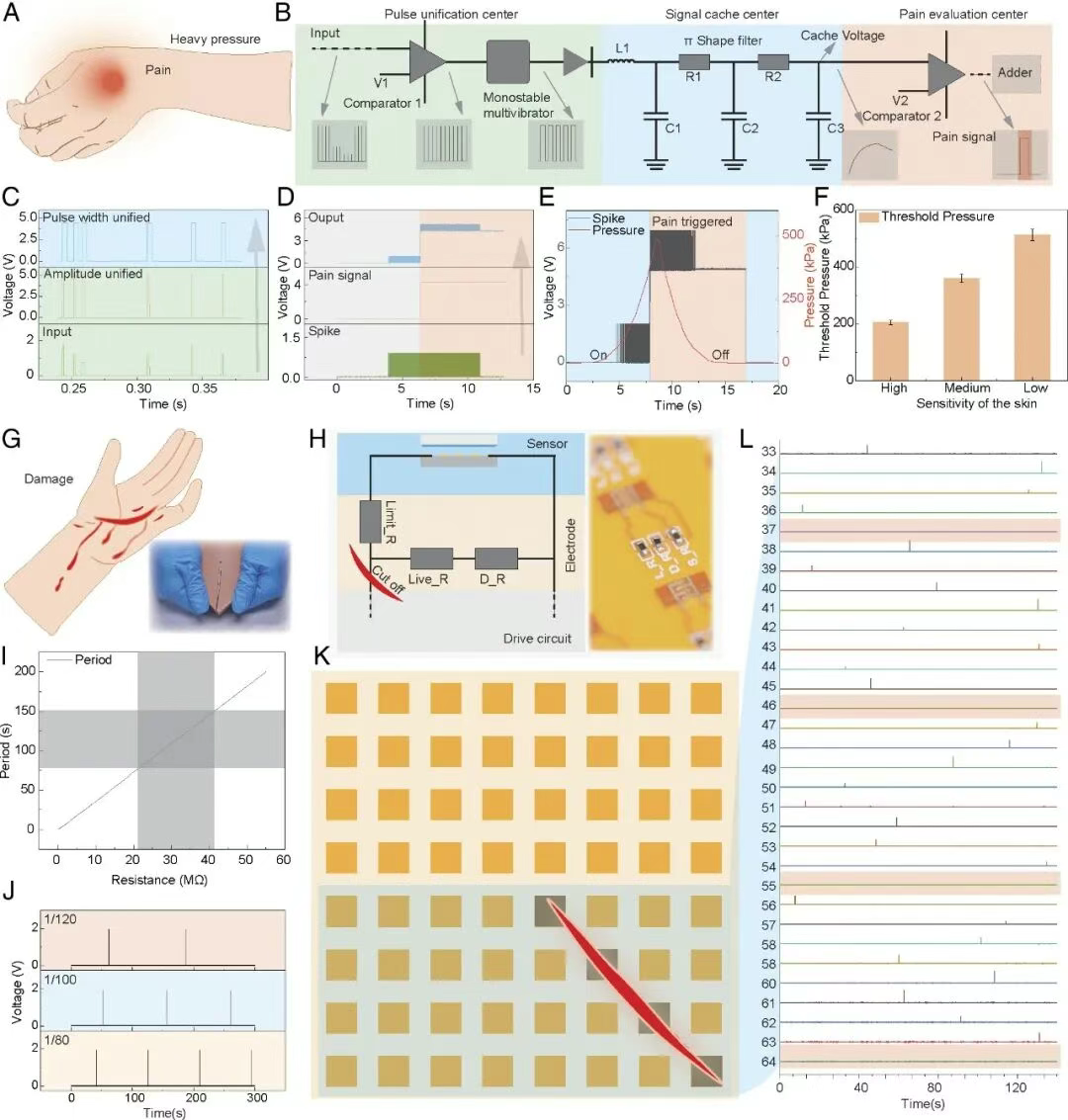
由于所有组件都具有柔性,因此该集成皮肤系统展现出优异的柔韧性。NRE 皮肤能够承受较大的形变,例如,扭转角度可达 38°,弯曲半径小至 3.2 厘米(图 1E 和 F 以及 SI 附录图 S5)。 有限元分析证实,在这些条件下,所有部件均保持在安全限度内,确保 NRE 蒙皮能够贴合机器人的曲面。NRE-Skin 的结构和编码原理如图 2A 所示,生物神经系统采用层级结构,将来自外周神经末梢的感觉信号通过越来越高级的处理中心传递。这种分层设计确保了最初由局部感受野捕获的原始刺激,在传递到大脑之前,通过连续的层级不断细化并汇聚成统一的感知表征。图2 NRE-皮肤系统的层级结构和编码方法。(A) 生物神经结构示意图。(B) NRE-皮肤系统的感受野配置和脉冲编码方法。© 脉冲编码中心工作原理电路图。(D 和 E) 传感器上的压力增加会提高脉冲频率。(F) 脉冲宽度由 R_PW 调节。(G) 脉冲形状由 C_PS 调节。(H) 脉冲幅度由 R_AM 调节。(I) 手指按压 NRE-皮肤的光学图像。(比例尺:1 cm。)(J) 施加在 NRE-皮肤上的“山峰状”压力分布,显示相应的脉冲频率变化。(K) 脉冲频率与施加的压力高度相关。(L) NRE-皮肤对多点接触的响应。受人体皮肤层级处理机制的启发,我们开发了一种用于 NRE 皮肤的 8×8 传感器阵列,如图 2B 所示。每个 NRE 皮肤都集成了一个多层层级编码系统。在传感器层,每个传感器都与一个脉冲发生器配对,该发生器将外部刺激转换为脉冲序列,其中脉冲频率反映了刺激强度。当这些脉冲序列穿过 NRE 皮肤时,它们会被编码上唯一的标识符。编码后的信号随后在信号积分器中汇聚,并输出到处理中心。处理中心通过分析这些脉冲信号的特征,确定刺激的精确位置和强度。这种设计赋予了 NRE 皮肤基本的边缘处理能力,这意味着它可以在传感器层执行初始数据处理。图 2C 展示了 NRE 皮肤人工感受信号传输网络的详细层级结构。脉冲发生器由环形振荡器和电阻-电容 (RC) 电路组成,其中电阻被定制设计的压阻式压力传感器所取代。该传感器作为传感核心,当施加外部压力时,其电阻值与压力成正比减小,从而降低 RC 电路的时间常数,进而提高脉冲频率(图 2D 和 2E 以及 SI 附录,注释 S2)。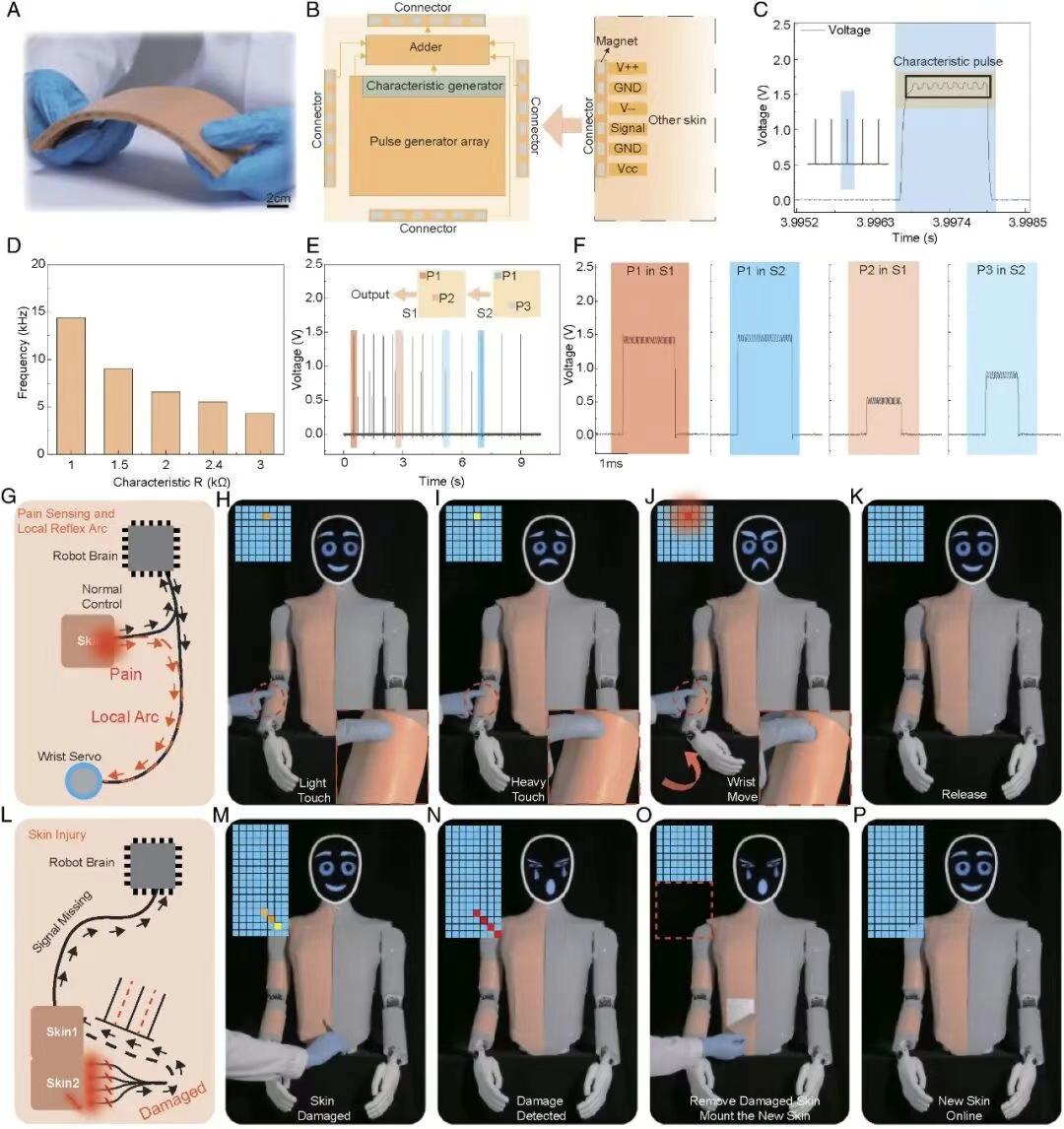
同时,该集成传感器展现出良好的压力传感性能,能够支持从轻柔触摸到疼痛刺激的完整触觉感知范围(详见 SI 附录,图 S6)。当这些脉冲序列穿过 NRE 皮肤时,它们会经历一系列调制。首先,脉冲宽度调制层利用边缘检测器和 RC 电路调整脉冲持续时间。脉冲宽度电阻(R_PW)从 1 到 7 kΩ变化,将脉冲宽度从 1 ms 扩展到 6.5 ms,每个点的离散变化小于 0.03 ms(参见 SI 附录图 S7A)。为了在脉冲可分离性和采样效率之间取得平衡,脉冲持续时间被选择在 1 ms 到 2.6 ms 之间(3)(参见图 2F 和 SI 附录图 S7B)。该范围对应于典型的神经信号时间尺度,既保证了与潜在的人机交互的兼容性,又避免了较窄脉冲所需的过高采样率。接下来,在脉冲形状控制层,一个独立的 RC 电路通过调节电容来优化信号,使脉冲的上升沿和下降沿更加平滑,较大的电容值会产生更平缓的过渡(图 2G 和 SI 附录图 S8)。与之前通过调节电阻进行脉冲频率和宽度调制不同,此处改变电阻会导致电压降,从而干扰幅度调制(SI 附录图 S9)。因此,此处改为调节脉冲形状电容(C_PS),从而获得更平滑的脉冲边缘,这可以通过脉冲一阶导数的最大值来观察。最后,反相运算放大器根据以下公式调节脉冲幅度:其中,Vout为输出信号,R-f为固定反馈电阻 (1 kΩ)。改变幅度调制电阻 (R_AM) 可以改变脉冲幅度(图 2H 和 SI 附录图 S10)。在本设计中,我们选择的幅度范围为 0.5 至 2 V。完全调制后的信号被送入信号积分器,与其他位置的输出信号合并,并传输至处理中心。之后,处理器对脉冲进行解码,以区分其特征并推断信号源,从而实现精确的触觉定位。这三个调制特性——脉冲形状、脉冲宽度和脉冲幅度——采用分层电路结构实现,以在分辨率逐步提高的层级上编码空间信息(参见 SI 附录图 S11 和注释 S3)。在最高(最粗)层,脉冲形状控制层通过调节电容(C_PS)将整个 8×8 像素的皮肤区域划分为四个大区域(每个区域 4×4 像素),并为每个区域内的所有像素分配独特的脉冲形状:例如,区域 1 使用尖锐的脉冲(低 C_PS 以实现快速上升/下降时间),这与区域 2 中更平缓、圆润的脉冲形状(高 C_PS)截然不同。在中间层,脉冲宽度调制层使用由电阻(R_PW)设置的不同脉冲宽度,将每个区域进一步划分为四个部分(每个部分 2×2 像素)。例如,第 1 部分的所有像素共享一个较窄的宽度(约 1 毫秒),而第 2 部分则使用较宽的宽度(约 1.5 毫秒),从而可以细化到区域尺度。最后,在最低(最精细)级别,脉冲幅度调制层通过反馈电阻 (R_AM) 控制的独特幅度来区分每个区域内的四个通道(单个像素),例如通道 1 为 0.5 V,通道 2 为 1.0 V。这种从脉冲形状(区域级别)到脉冲宽度(区域级别)再到脉冲幅度(通道级别)的渐进过程,系统地将触觉刺激的位置从粗略缩小到精细。通过这种分层脉冲编码,NRE 皮肤将触觉事件转换为离散的脉冲信号,从而实现事件驱动的传感机制。这样,事件驱动策略确保只处理携带脉冲的信号,从而在保持传感效率的同时,大大降低整体能耗(参见 SI 附录,注释 S4)。此外,NRE 皮肤系统还可以通过仅分析脉冲形状等高级特征来进行快速、近似的定位。通过解码脉冲形状,系统可以快速识别受刺激的皮肤区域,从而提供快速但模糊的定位,而无需处理脉冲宽度或脉冲幅度等更精细的细节。这种能力在速度优先于精度的场景中尤为重要,因为它能够仅基于高级特征分析就提供即时反馈。然而,用于脉冲宽度和形状调制的 RC 电路要求 R_PW 和 C_PS 保持在特定范围内才能正常工作。超出这些范围会导致高压下脉冲宽度压缩或过大的 RC 时间常数造成幅度失真,从而影响脉冲分析。为了缓解这些问题,我们通过实验确定了合适的工作范围,限制了电阻、电容和工作频率,从而确保了电路的稳定性能。关于这些限制及其解决方案的详细讨论,请参见补充信息附录中的图 S12 和 S13 以及注释 S5 和 S6。此外,NRE 皮肤系统能够响应涵盖日常活动范围的各种力(28-30),这可以通过脉冲强度来体现。如图 2 I 和 J 所示,对皮肤施加动态压力(逐渐增加和释放力)会导致脉冲频率先增加后减少。图 2K 进一步量化了这种关系,显示施加的压力与脉冲频率之间存在正相关关系。如图 2L 所示,NRE 皮肤通过其脉冲位置编码架构实现了多点触觉传感,从而允许在单个输出通道内区分多个接触点。每个像素通过环形振荡器生成独特的脉冲序列,其形状、宽度和幅度经过调制以携带空间标识符。这些编码信号能够实时集成同步输入,通过将多个信号整合到单个端口显著降低了布线复杂性,并促进了多个皮肤模块的可扩展互连。高级功能设计:疼痛感知和损伤感知疼痛和损伤检测是生物皮肤的基本功能,对于触发快速保护性反应以防止进一步伤害至关重要。尽管这些功能对于在机器人领域实现以人为本的同理心交互至关重要,但鲜有研究探索人造皮肤的这些能力。本文报道的 NRE 皮肤可以解决这一问题,因为它具有固有的主动疼痛和损伤感知功能,从而赋予机器人类似人类的保护性感知能力。在生物皮肤中,特化的机械伤害感受器通过脊髓中枢神经系统直接与局部肌肉相连,形成局部反射弧。只要刺激超过阈值,该反射弧就会触发肌肉的即时反应以减轻危险(图 3A)。这种绕过大脑处理的无意识过程速度显著更快。受此机制的启发,我们在每个 NRE-皮肤系统中设计了类似的疼痛感受器系统,用于检测极端情况以形成类似的反射弧(图 3B)。该系统由三个关键组件构成:脉冲整合中心、信号缓存中心和疼痛评估中心。来自脉冲发生器的压力触发原始脉冲在信号缓存中心累积,直到超过预设的疼痛阈值,从而激活疼痛信号。图3 高级功能:NRE 皮肤系统中的主动疼痛和损伤感知。(A) 生物疼痛感知示意图。(B) 疼痛感知中心电路图。© 传输至信号缓存中心前的统一脉冲。(D) 输出信号组合了疼痛信号和正常脉冲信号。(E) 重压触发疼痛信号,刺激移除后疼痛信号会短暂持续。(F) 可通过调节单稳态多谐振荡器中 RC 电路的时间常数来调节疼痛阈值。(G) 受生物皮肤启发,NRE 皮肤中主动损伤感知示意图。(H) 具有功能电阻的电极电路图和光学图像。(I 和 J) 调整 Live_R 值会改变脉冲周期。(K 和 L) NRE 皮肤在右下角区域被切开。图中显示了来自 NRE 皮肤下部各个通道的实时脉冲信号,在受伤部位未检测到脉冲。然而,如前所述,来自皮肤不同区域的原始脉冲持续时间和振幅各不相同,导致信号缓存中心的充电速率不一致(见补充信息图 S14)。这种差异会干扰疼痛阈值标准,而理想情况下,疼痛阈值应仅受脉冲频率(即施加的压力)的影响。为了解决这个问题,我们采用比较器和单稳态多谐振荡器来标准化脉冲振幅(5 V)和脉冲宽度(2 ms),从而确保在一致的负载条件下获得均匀的充电速率(见图 3C 和补充信息图 S15 和 S16)。此外,通过调节单稳态多谐振荡器的外部电阻,可以精确控制脉冲持续时间,进而优化充电速率(见补充信息图 S17)。接下来,标准化的脉冲对信号缓存中心进行充电,C3 上的电压作为指示信号。当缓存电压超过 V2(设定为 4.0 V,对应的压力为 360 kPa,与生物皮肤的疼痛阈值相符)(35, 36) 时,第二个比较器会将 5 V 的疼痛信号直接输出到信号积分器(图 3D 和视频 S1)。与正常的触觉信号(小于 2 V)相比,该 5 V 疼痛信号的幅度更高,能够直接激活“肌肉层面”的局部运动控制中心,完全绕过处理延迟。这种快速的反射性反应确保了无需程序干预即可立即采取行动。此外,系统软件会赋予疼痛信号高优先级,使机器人能够在“意识层面”以较慢的速度识别和响应异常情况,从而进一步增强对周围环境的感知。此外,这种设计与人类皮肤感知类似:随着压力增加并超过疼痛阈值,疼痛信号被触发;压力释放后,疼痛信号会短暂持续后消散(图 3E)(37)。我们研究了施加压力的幅度、速率和持续时间如何影响疼痛信号的出现和时间。不同的压力水平会在信号缓存中心产生不同的稳定电压水平,只有达到或超过阈值的压力才会触发疼痛信号(SI 附录,图 S18)。达到这种稳定状态所需的时间也各不相同,导致疼痛触发的起始时间也不同(SI 附录,图 S19)。这种行为与生物系统类似,在生物系统中,个体可以在低于疼痛阈值的较大压力下持续一段时间才会感到疼痛。此外,NRE 皮肤中疼痛检测机制的灵敏度可以通过疼痛评估中心内的单稳态多谐振荡器进行调节。例如,调整外周 RC 电路的时间常数会改变疼痛脉冲的持续时间,从而直接影响疼痛触发阈值。较低的时间常数会导致疼痛脉冲持续时间缩短,从而增加激活疼痛信号所需的压力,并有效提高疼痛阈值。如图 3F 所示,疼痛脉冲持续时间分别为 1 ms、2 ms 和 3 ms 时,对应的疼痛阈值分别为 205 kPa(低)、360 kPa(中)和 502 kPa(高)。这种可调性使得 NRE 皮肤的灵敏度可以根据特定需求进行调整,例如,对于机器人手部等精细部位可以提高灵敏度,而对于背部等较坚固的部位则可以降低灵敏度。人类皮肤具有先进的损伤检测和修复机制,能够持续发出损伤位置信号,以便及时采取预防措施或进行治疗(图 3G)。这种能力对于机器人监测其人造皮肤的状态并确保可靠的传感同样至关重要。据我们所知,目前尚未有类似的概念和设计报道。为了实现这一目标,我们将功能电阻集成到 NRE 皮肤的电极中(图 3H 和 SI 附录图 S1A),包括并联的 Live_R(22 至 40 MΩ)和 Difference_R(D_R,500 kΩ至 10 MΩ),以及串联的 Limit_R(2.7 kΩ)。Live_R 用于延迟脉冲发生器中电容器的充电时间,而 D_R 用于区分每个像素的电阻。在空载状态下,R_Pressure 接近无穷大,这种并联组合会每隔 75 至 150 秒触发一个周期性的“实时脉冲”(图 3I 和 J 以及 SI 附录图 S20)。此外,Limit_R 可防止脉冲宽度失效,这一点之前已经提到过(SI 附录,注释 S5)。当 NRE 皮肤受损时,环形振荡器结构断裂,导致受损传感器停止产生实时脉冲(图 3H)。每个传感器都与一个定时器配对,该定时器在检测到脉冲时复位。如果在 300 秒内没有脉冲出现,定时器溢出,将传感器标记为受损,并持续向接口发送损伤信号。为了验证这一点,我们切除了 NRE 皮肤的右下角(图 3K 和 SI 附录图 S21),并监测了每个像素的实时脉冲。如图 3L 所示,所有丢失的脉冲都对应于受损区域,证实了系统在识别和发出损伤信号方面的准确性。这确保了机器人能够像生物系统一样保持可靠的触觉感知和安全性。应用领域:机器人快速简便的拆卸/组装在机器人应用中,快速更换损坏的电子皮肤或改变其功能对于维持运行效率和适应动态环境至关重要。为此,我们设计了 NRE 电子皮肤系统,该系统集成了一个磁性接口,可通过简单的磁体装置实现多个电子皮肤的快速电气和机械连接(图 4 A 和 B 以及 SI 附录图 S22)。每个电子皮肤都由一个高频、低振幅的特征峰唯一标识,该特征峰由环形振荡器和特征电阻为 1 至 3 kΩ的 RC 电路产生,特征频率为 4 至 14 kHz(图 4 C 和 D 以及 SI 附录图 S23)。多个电子皮肤连接后,可通过向处理中心中继信号自动形成网络。每个脉冲都带有独特的特征,指示其来源皮肤(图 4E)。其中,皮肤 1(S1,特征电阻为 1.5 kΩ)和皮肤 2(S2,特征电阻为 2 kΩ)分别从 P1(两个皮肤共享同一位置)、P2 和 P3(每个皮肤独有)发出信号。这些位置的刺激均被准确检测到,S1 的特征峰值频率高于 S2(图 4F)。图4 NRE 皮肤系统的应用。(A) 显示多个连接的 NRE 皮肤的光学图像。(B) NRE 皮肤系统的连接接口。© 脉冲峰值位置的特征脉冲。(D) 特征电阻的变化调节特征频率。(E 和 F) 在多个连接的 NRE 皮肤系统中,不同皮肤层(S1 中的红色部分,S2 中的蓝色部分)的信号和特征脉冲各不相同。(G) 疼痛感知和局部反射弧示意图。(H-K) 人形机器人承受不同程度的压力,皮肤受到较大压力会触发疼痛感和局部反射反应。(L) 主动皮肤损伤感知示意图。(M-P) 当人形机器人被刀割伤时,自检系统会检测到损伤及其确切位置。用完好的皮肤替换受损区域后,后续的自检会重新激活新皮肤。除了物理模块化设计外,NRE 皮肤还采用了基于机器学习开发的层级式识别网络,该网络包含四层:皮肤层、区域层、截面层和通道层(见补充信息附录图 S24)。该结构反向映射了信号传输过程,通过逐步细化位置数据,实现了快速近似定位。通过将具有相似特征的像素分组,该方法丰富了数据集并增强了分析能力。如补充信息附录图 S25-S27 和注释 S7 所示,该集成模型使用支持向量机(SVM)模型实现了 99%的识别准确率。应用领域:局部反射电弧反应和受伤后的快速更换NRE 皮肤被应用于人形机器人,以展示其先进功能,包括利用局部反射感知疼痛以及主动检测损伤并快速更换。图 4G 展示了触觉感知和局部反射的控制逻辑,模拟了人类的触觉感知和条件反射(直接的感觉运动连接)。在轻微的触觉刺激下,机器人表现出积极的反应,例如微笑(图 4H 和视频 S2)。随着压力增加到不适但可耐受的程度,它会表现出轻微的消极反应,例如痛苦的表情(图 4I)。当压力超过疼痛阈值时,机器人会感受到剧烈的疼痛,触发高优先级中断,绕过处理中心直接触发手部保护动作,并伴有痛苦的表情(图 4J)。这种反射机制模拟了人类皮肤的快速回避反应,其中疼痛信号会触发立即行动。一旦外部刺激停止,机器人就稳定下来(图 4K)。除了疼痛感知之外,NRE 皮肤还模拟了人体皮肤的损伤检测和修复能力。由于仿生电子元件和非生物材料本身不具备再生能力,因此 NRE 皮肤经过专门设计,能够主动识别损伤并提醒更换。与以往需要被动监测的电子皮肤不同,NRE 皮肤采用自感知技术(图 3 H–K),每 5 分钟进行一次自主全身检查(图 4L)。当发生不可逆损伤时,例如割伤(图 4M 和视频 S3),相应位置的脉搏信号缺失会向机器人发出损伤信号(图 4N)。NRE 皮肤的模块化设计简化了维护:只需将受损的皮肤剥离(图 4O),然后更换为完好的皮肤(图 4P),并在自检后即可投入使用。这项创新提高了电子皮肤的耐用性,并推动了仿生机器人技术的应用。结论这种 NRE 皮肤采用了一种受人类体感原理启发的分层式神经形态感受野设计,不仅能够实现基本的触觉感知,还能实现主动疼痛和损伤检测、局部反射反应以及快速模块化组装等高级功能。与传统的模拟信号传输不同,我们的系统将刺激转换为类似神经的脉冲序列,这些脉冲序列在多层架构中传播,每个脉冲在传播过程中编码不同的时空特征。作为概念验证,本研究证明了我们提出的神经形态架构在高效触觉感知方面的有效性。然而,仍然存在一些挑战,例如多点高压刺激下的脉冲重叠会干扰特征提取,以及在同时进行多点压缩时疼痛检测阈值降低,这可能会影响强度辨别。通过改进脉冲编码和缩小疼痛评估的空间覆盖范围来解决这些问题,将在未来迭代中获得更具鲁棒性的 NRE 皮肤。总之,这项工作建立了一个神经形态触觉电子皮肤框架,该框架统一了高效的信号处理、自我保护的疼痛感知和自适应传感,为未来智能和人机交互机器人平台奠定了坚实的基础。参考文献:Y. Gao, J. Zhang, H. Zhang, L. Chow, G. Zhao, G. Guo, C.K. Yiu, B. Zhang, Y. Huang, J. Zhou, Q. Zhang, T. Huang, Y. Guo, J. Li, J. Li, X. Huang, Z. Chen, Z. Liu, Y. Qiu, C. Guo, & X. Yu, A neuromorphic robotic electronic skin with active pain and injury perception, Proc. Natl. Acad. Sci. U.S.A. 122 (52) e2520922122, https://doi.org/10.1073/pnas.2520922122 (2025).

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 10
10 0
0- 0



 已为社区贡献17条内容
已为社区贡献17条内容

所有评论(0)