探索多智能体系统中的神经网络与自适应动态滑模控制
多智能体系统由多个自主智能体组成,这些智能体通过相互协作、竞争等方式来完成复杂任务。想象一下,一群无人机协同执行搜索救援任务,每架无人机就是一个智能体,它们之间需要实时通信、协调行动,这便是多智能体系统的一个典型应用场景。从代码角度来看,为了构建一个简单的多智能体通信框架,可以使用Python的socket库。# 创建socket对象# 获取本地主机名# 绑定端口号# 设置最大连接数,超过后排队#
多智能体,神经网络,自适应动态滑模,有文献可以参考。 符合要求请放心联系,simulink,复现,保证能够运行。
在如今的科技领域,多智能体系统、神经网络以及自适应动态滑模控制这些概念,正引领着智能控制与协同系统发展的潮流。今天就来和大家深入聊聊这几个技术点,顺便讲讲如何在Simulink中复现相关内容,确保模型能成功运行。
多智能体系统概述
多智能体系统由多个自主智能体组成,这些智能体通过相互协作、竞争等方式来完成复杂任务。想象一下,一群无人机协同执行搜索救援任务,每架无人机就是一个智能体,它们之间需要实时通信、协调行动,这便是多智能体系统的一个典型应用场景。
从代码角度来看,为了构建一个简单的多智能体通信框架,可以使用Python的socket库。以下是一个简单示例:
import socket
# 创建socket对象
s = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
# 获取本地主机名
host = socket.gethostname()
port = 9999
# 绑定端口号
s.bind((host, port))
# 设置最大连接数,超过后排队
s.listen(5)
while True:
# 建立客户端连接
c, addr = s.accept()
print('连接地址:%s' % str(addr))
msg = '欢迎访问菜鸟教程!' + "\r\n"
c.send(msg.encode('utf-8'))
c.close()在这段代码中,一个智能体(这里简单用服务器端模拟)创建了一个socket,绑定到特定的地址和端口,监听其他智能体(客户端)的连接请求。当有连接进来时,发送一条简单消息。这模拟了多智能体系统中最基本的通信过程。
神经网络在多智能体中的应用
神经网络强大的学习和预测能力,使其在多智能体系统中发挥着关键作用。比如,智能体可以利用神经网络来学习环境信息、预测其他智能体的行为,从而更好地进行协作。
以一个简单的前馈神经网络在多智能体决策中的应用为例,我们用Keras框架来构建模型:
from keras.models import Sequential
from keras.layers import Dense
# 创建模型
model = Sequential()
model.add(Dense(12, input_dim=8, activation='relu'))
model.add(Dense(8, activation='relu'))
model.add(Dense(1, activation='sigmoid'))
# 编译模型
model.compile(loss='binary_crossentropy', optimizer='adam', metrics=['accuracy'])这里构建了一个具有两个隐藏层的前馈神经网络。输入层有8个神经元,对应多智能体接收到的8个特征信息。隐藏层分别有12个和8个神经元,激活函数选择ReLU。输出层一个神经元,使用sigmoid激活函数,可用于二分类决策任务,比如智能体决定是否执行某项行动。
自适应动态滑模控制
自适应动态滑模控制结合了滑模控制的鲁棒性和自适应控制的自适应性。在多智能体系统中,它能使智能体在面对复杂多变的环境时,保持稳定且高效的运行。

简单来说,滑模控制通过设计一个滑动面,让系统状态在有限时间内到达并保持在这个面上,从而实现期望的控制目标。而自适应部分则根据系统实时状态,动态调整控制参数。
以下是一个简单的自适应滑模控制算法伪代码:
初始化参数:Kp, Ki, Kd, epsilon
while True:
获取系统当前状态x
计算误差e = x - x_d (x_d为期望状态)
计算滑模面s = e + Kd * integral(e)
if |s| > epsilon:
u = -Kp * sgn(s) - Ki * integral(s)
else:
u = 0
应用控制量u到系统
更新时间步在这段伪代码中,首先初始化一些控制参数。在每一个时间步,获取系统当前状态并计算与期望状态的误差。根据误差计算滑模面,当滑模面的值超过一定阈值时,计算控制量并应用到系统中,否则控制量为0。
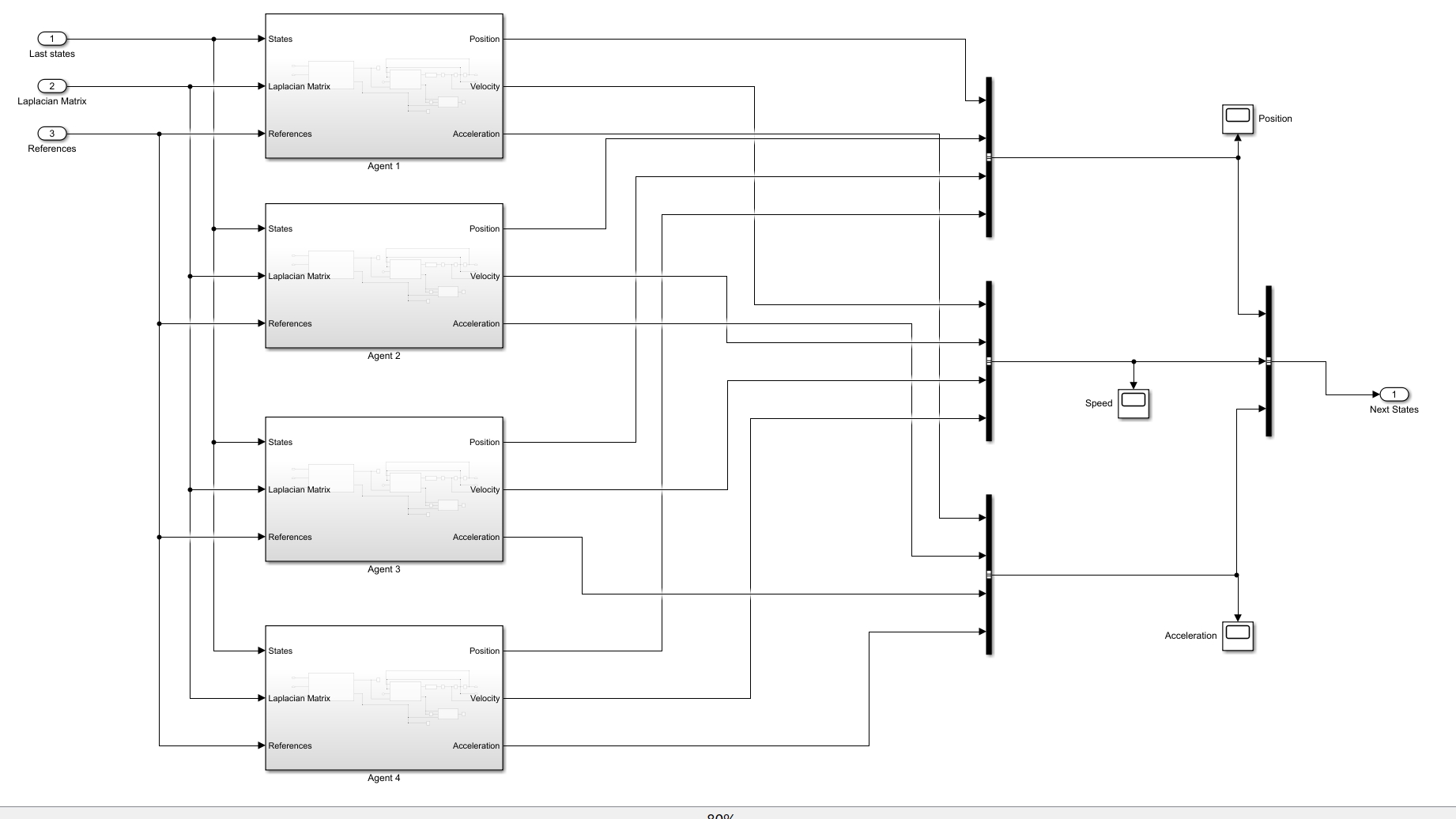
在Simulink中复现
在Simulink中复现上述内容,可以利用Simulink丰富的模块库。比如,使用“Matlab Function”模块来嵌入前面提到的神经网络或自适应滑模控制算法代码。
以神经网络为例,将训练好的模型参数导出,在“Matlab Function”模块中编写代码,根据输入数据进行预测。对于自适应动态滑模控制,可以使用“Gain”模块来实现比例、积分、微分控制部分,结合“Switch”模块来实现基于滑模面的控制逻辑切换。
只要严格按照各个模块的输入输出要求进行连接,确保代码逻辑正确,就能够在Simulink中成功复现多智能体系统中结合神经网络与自适应动态滑模控制的模型,并保证其能够稳定运行。
希望通过这篇博文,大家对多智能体系统中的神经网络与自适应动态滑模控制有更深入的理解,并且能够顺利在Simulink中完成复现工作。如果有任何问题,欢迎在评论区留言交流。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 30
30 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)