Experimental Study on Reference-Path-Aided System Calibration for mmWave Bistatic ISAC Systems
—通感一体化(ISAC)被视为下一代无线网络的关键使能技术。与单基站 ISAC 相比,双基站 ISAC 可以消除自干扰消除这一关键挑战,并且与现有的网络基础设施具有良好的兼容性。然而,发射机与感知接收机之间的同步成为了一个至关重要的问题。在通信同步下提取的用于感知的信道状态信息(CSI)包含不同类型的系统误差,例如采样时间偏移(STO)、载波频率偏移(CFO)和随机相位偏移,这些误差会严重降低感知
摘要——通感一体化(ISAC)被视为下一代无线网络的关键使能技术。与单基站 ISAC 相比,双基站 ISAC 可以消除自干扰消除这一关键挑战,并且与现有的网络基础设施具有良好的兼容性。
然而,发射机与感知接收机之间的同步成为了一个至关重要的问题。在通信同步下提取的用于感知的信道状态信息(CSI)包含不同类型的系统误差,例如采样时间偏移(STO)、载波频率偏移(CFO)和随机相位偏移,这些误差会严重降低感知性能,甚至导致感知无法进行。
为了解决这一问题,本文为毫米波双基站 ISAC 系统设计了一种辅助参考路径的系统校准方案,其中视距(LoS)路径可能会被遮挡。利用毫米波 ISAC 系统中的时延-角度稀疏特性,首先识别出参考路径,该路径可以是 LoS 或非视距(NLoS)路径。利用所有路径都遭受相同系统误差这一事实,从参考路径提取的信道参数被用于补偿所有其他路径中的系统误差。
我们开发了一个毫米波 ISAC 系统来验证我们的设计。实验结果表明,所提出的方案能够支持多普勒频移和时延的精确估计,并将时间同步误差保持在 1 1 1 纳秒以内。
文章目录
I. INTRODUCTION
如果系统误差在所有天线是一致的,则可以利用一个特定天线作为参考来校准时变的系统误差。一种典型的方法是 CSI 比率(CSI-ratio)方案,其中计算两个天线上 CSI 的比率以补偿时变系统误差 [7]。
另一种典型的方法是跨天线互相关(CACC)[8],其中在剩余天线的 CSI 和参考天线的 CSI 之间执行共轭相乘。需要额外的步骤来消除 CSI 比率和 CACC 的副作用,例如 CACC 中的虚假路径 [9]。为了同时校准 STO 和时变系统误差,可以提取时延域特征,因为所有路径都经历相同的系统损伤。
- 在 [10] 中,建立了一个强的视距(LoS)路径作为参考,其信道参数用于补偿由 STO、CFO 和随机相位偏移引起的相位偏移。
- 在 [11] 中,由于时延域的分辨率较低,开发了压缩感知算法来提取 LoS 路径信息。
- 在 [12] 中,首先分离静态路径和动态路径,然后利用从静态路径提取的随机相位来补偿动态路径的多普勒估计。
- 在 [13] 中,考虑毫米波 IEEE 802.11ay 系统,其中 LoS 路径被识别为信道冲激响应(CIR)中的第一个峰值,然后利用 LoS 路径的静态特征来补偿 STO 并消除 CFO。
然而,这些方法依赖于 LoS 路径,并假设所有天线具有相同的 STO(sampling time offset)。
在本文中,为毫米波双基站 OFDM ISAC 系统设计了一种辅助参考路径的系统校准方案。此外,考虑了一个更通用的系统模型,其中不同的天线经历不同的 STO,并且 LoS 路径可能会被遮挡。
为了处理 LoS 路径的遮挡,部署了一个额外的参考反射器,例如可重构智能超表面(RIS),以创建一个用于校准的非视距(NLoS)参考路径。为了进行系统校准,我们
-
首先通过毫米波系统中的时延-角度稀疏特征识别参考路径。特别是,利用不同天线上的相干时延,首先消除了不同天线上的相对 STO,从而可以估计具有不同时延的不同路径的到达角(AoA)。利用 AoA 信息进一步识别参考路径。
-
接下来,提取参考路径的信道参数。由于所有路径都遭受相同的系统误差,提取的参考路径信道参数通过简单的比率计算用于补偿所有路径中的系统误差。
-
然而,比率计算(ratio calculation)会破坏每条路径的导向矢量,因此最终进行了相控阵的重构(the reconstruction of a phased array is finally conducted)。
为了验证上述设计,我们开发了一个带宽为 500 500 500 MHz 的 26 26 26 GHz 毫米波 OFDM ISAC 系统。所提出的系统校准的有效性在 LoS 和 NLoS 场景下的实验研究中得到了验证,结果表明,随时间变化的随机相位偏移可以被很好地消除以用于多普勒估计,并且可以实现用于距离估计的亚纳秒级时间同步。
II. SYSTEM AND SIGNAL MODELS
A. System Model
本文考虑一个双基站 ISAC 系统,其中发射机 (Tx) 和感知接收机 (Rx) 的位置是固定的。例如,Tx 和感知 Rx 可以是 B5G/6G 网络中的两个基站 (BS)。在实践中,直连链路,即 Tx 和 Rx 之间的视距 (LoS) 路径,可能会由于移动障碍物而经历间歇性遮挡,如图 1 所示。因此,发射机和感知接收机之间可能存在 LoS 路径,或者仅存在非视距 (NLoS) 路径。
- 对于 LoS 场景,LoS 路径可用作系统校准的参考路径。
- 为了支持 NLoS 场景,系统校准需要一条强的 NLoS 路径,这可以在环境中找到或人工部署。
例如,可以部署可重构智能超表面 (RIS) 作为参考反射器以形成强的 NLoS 路径。Tx、Rx 和参考反射器的朝向和位置(orientations and locations)是先验知识。
- 因此,在 LoS 场景中,提供了 LoS 路径的到达角 (AoA) 以及 Tx 和 Rx 之间的距离,
- 而在 NLoS 场景中,提供了参考路径的 AoA 以及沿 Tx-参考反射器-Rx 路径的组合距离。
B. Signal Model
感知 Rx 利用嵌入在 OFDM 通信信号中的公共参考信号 (RS) 来提取用于无线感知的 CSI。考虑到具有 N N N 个子载波和 M M M 个符号的 OFDM 信号,接收信号可以建模为
Y p = H p X + w p , (1) \mathbf{Y}_p = \mathbf{H}_p \mathbf{X} + \mathbf{w}_p, \tag{1} Yp=HpX+wp,(1)
其中 X \mathbf{X} X 是发射信号, H p \mathbf{H}_p Hp 是第 p p p 个接收天线的 CSI 矩阵, w p \mathbf{w}_p wp 是高斯噪声。对于理想情况,第 m m m 个符号的第 n n n 个子载波上的 CSI 矩阵 H p \mathbf{H}_p Hp 的元素可以建模为
H p [ m , n ] = ∑ l = 1 L a l [ p ] b l e − j 2 π n Δ f τ l e j 2 π m f D , l T , (2) \mathbf{H}_p[m, n] = \sum_{l=1}^{L} \boldsymbol{a}_l[p] b_l e^{-j2\pi n \Delta f \tau_l} e^{j2\pi m f_{D,l} T}, \tag{2} Hp[m,n]=l=1∑Lal[p]ble−j2πnΔfτlej2πmfD,lT,(2)
其中 L L L 是从 Tx 到感知 Rx 的传播路径总数;
- a l \boldsymbol{a}_l al 是第 l l l 条路径的导向矢量,且 a l = [ 1 , e j 2 π d λ sin ϕ l , . . . , e j 2 π ( P − 1 ) d λ sin ϕ l ] \boldsymbol{a}_l = [1, e^{j2\pi \frac{d}{\lambda} \sin \phi_l}, ..., e^{j2\pi (P-1) \frac{d}{\lambda} \sin \phi_l}] al=[1,ej2πλdsinϕl,...,ej2π(P−1)λdsinϕl],其中 d d d 是相邻天线的距离间隔, λ \lambda λ 是信号波长, ϕ l \phi_l ϕl 是第 l l l 条路径的 AoA;
- τ l \tau_l τl 和 f D , l f_{D,l} fD,l 分别表示第 l l l 条路径的时延和多普勒频移;
- Δ f \Delta f Δf 和 T T T 分别表示 OFDM 子载波间隔和符号持续时间;
- b l b_l bl 是第 l l l 条路径的复衰减。
时延 τ l \tau_l τl、多普勒频移 f D , l f_{D,l} fD,l 和 AoA ϕ l \phi_l ϕl 的感知估计主要取决于不同维度上的相位变化。
由于 Tx 和感知 Rx 之间的硬件损伤,在感知 Rx 处提取的 CSI 中存在 STO、CFO 和随机相位偏移。如果不对这些误差进行适当的校准,感知性能将受到显著影响。因此,考虑到这些误差,实际提取的原始 CSI H ^ p \hat{\mathbf{H}}_p H^p 可以建模为
H ^ p [ m , n ] = e j θ m e j 2 π n Δ f τ STO , p ∑ l = 1 L a l [ p ] b l e − j 2 π n Δ f τ l e j φ D , m , l . (3) \hat{\mathbf{H}}_p[m, n] = e^{j\theta_m} e^{j2\pi n \Delta f \tau_{\text{STO},p}} \sum_{l=1}^{L} \boldsymbol{a}_l[p] b_l e^{-j2\pi n \Delta f \tau_l} e^{j\varphi_{D,m,l}}. \tag{3} H^p[m,n]=ejθmej2πnΔfτSTO,pl=1∑Lal[p]ble−j2πnΔfτlejφD,m,l.(3)
公式 ( 3 ) (3) (3) 中的系统误差解释如下。
-
每个天线 p p p 连接到一个独立的射频 (RF) 链路,但它们共享相同的时钟。因此,随时间变化的 CFO 和随机相位偏移对于所有天线/RF 链路都是相同的。 我们使用 θ m \theta_m θm 来表示 CFO 和随时间变化的随机相位偏移的共同影响。
-
在基带中,不同 RF 链路的采样是独立处理的,因此不同天线的 STO 可能不同,对于天线 p p p 表示为 τ STO , p \tau_{\text{STO},p} τSTO,p。由于这个问题,即使射频前端是相控阵,也无法直接使用原始 CSI 估计 AoA。
为简单起见,使用 e j φ D , m , l = e j 2 π m f D , l T e^{j\varphi_{D,m,l}} = e^{j2\pi m f_{D,l} T} ejφD,m,l=ej2πmfD,lT 表示多普勒频移。提取的原始 CSI 也受到噪声的影响,在公式 ( 3 ) (3) (3) 中被忽略了。系统校准的主要目的是消除 θ m \theta_m θm 和 τ STO , p \tau_{\text{STO},p} τSTO,p 的影响。
系统误差与信道建模推导
实际提取的原始 CSI H ^ p \hat{\mathbf{H}}_p H^p 是理想物理信道与两层硬件损伤的叠加。数学模型如下:
H ^ p [ m , n ] = e j θ m ⏟ ①共性误差 ⋅ e j 2 π n Δ f τ STO , p ⏟ ②个性误差 ⋅ ∑ l = 1 L a l [ p ] b l e − j 2 π n Δ f τ l e j φ D , m , l ⏟ ③真实物理信道 (3) \hat{\mathbf{H}}_p[m, n] = \underbrace{e^{j\theta_m}}_{\text{①共性误差}} \cdot \underbrace{e^{j2\pi n \Delta f \tau_{\text{STO},p}}}_{\text{②个性误差}} \cdot \underbrace{\sum_{l=1}^{L} \boldsymbol{a}_l[p] b_l e^{-j2\pi n \Delta f \tau_l} e^{j\varphi_{D,m,l}}}_{\text{③真实物理信道}} \tag{3} H^p[m,n]=①共性误差 ejθm⋅②个性误差 ej2πnΔfτSTO,p⋅③真实物理信道 l=1∑Lal[p]ble−j2πnΔfτlejφD,m,l(3)
- 共性误差项 (时变,与天线无关)
- 公式: e j θ m e^{j\theta_m} ejθm
- 物理含义:载波频率偏移 (CFO) 和随时间变化的随机相位偏移。
- 成因:所有天线/射频链路共享同一个时钟源 (Common Clock)。因此,该误差对于所有天线是完全一致的,仅随时间符号 m m m 变化。
- 影响:主要干扰多普勒 (Doppler) 的估计。
- 个性误差项 (空变,与天线有关)
- 公式: e j 2 π n Δ f τ STO , p e^{j2\pi n \Delta f \tau_{\text{STO},p}} ej2πnΔfτSTO,p
- 物理含义:采样时间偏移 (STO)。
- 成因:尽管时钟源相同,但每个天线的射频链路 (RF Chain) 是独立采样的。天线 p p p 具有自己独特的采样延时 τ STO , p \tau_{\text{STO},p} τSTO,p。
- 影响:该项引入了随天线变化的额外相位,破坏了天线阵列间的相位关系。这意味着即使使用相控阵,也无法直接通过比较天线相位差来估计到达角 (AoA)。
3. 真实物理信道项 (待恢复目标)
- 公式: ∑ l = 1 L a l [ p ] b l e − j 2 π n Δ f τ l e j φ D , m , l \sum_{l=1}^{L} \boldsymbol{a}_l[p] b_l e^{-j2\pi n \Delta f \tau_l} e^{j\varphi_{D,m,l}} ∑l=1Lal[p]ble−j2πnΔfτlejφD,m,l
- 包含信息:
* a l [ p ] \boldsymbol{a}_l[p] al[p] (导向矢量):携带 AoA ( ϕ l \phi_l ϕl) 信息。
* e − j 2 π n Δ f τ l e^{-j2\pi n \Delta f \tau_l} e−j2πnΔfτl (频域相位旋转):携带 距离/时延 ( τ l \tau_l τl) 信息。
* e j φ D , m , l e^{j\varphi_{D,m,l}} ejφD,m,l (时域相位旋转):携带 速度/多普勒 ( f D , l f_{D,l} fD,l) 信息。
总结
系统校准的目标是从观测到的 H ^ p \hat{\mathbf{H}}_p H^p 中剥离出 θ m \theta_m θm 和 τ STO , p \tau_{\text{STO},p} τSTO,p,以还原真实的物理信道参数。
III. REFERENCE-PATH-AIDED CALIBRATION DESIGN
在所提出的系统校准方案中,利用参考路径来辅助校准。参考路径可以是 LoS 路径或 NLoS 路径,因此该校准方案在 LoS 和 NLoS 场景下均可行。参考路径有一定的要求。首先,参考路径应该是静态的,并具有较强的反射功率,以使该路径可区分并保持其信道响应一致。
与许多假设存在 LoS 路径且容易识别为第一个时延路径的现有研究不同,我们的系统模型考虑了 LoS 路径可能不存在或被间歇性阻挡的情况,这需要使用部署的 NLoS 参考来进行系统校准。为此,利用原始 CSI 识别参考路径是首先要解决的问题。一个直观的解决方案是检查路径的几个关键参数是否与参考路径的已知信息匹配。虽然给出了参考路径的距离和 AoA 信息,但它们无法直接从原始 CSI 中提取以进行匹配。
- 一方面,由于 STO 的存在,每条路径的估计时延/距离有很大的偏差,因此无法与参考路径的确切距离相匹配。
- 另一方面,由于不同天线具有不同的 τ STO , p \tau_{\text{STO},p} τSTO,p,每条路径的角度无法被准确估计。
为了解决这个问题,
-
我们首先消除不同天线的相对 STO,以便能够对每条路径进行准确的 AoA 估计。
-
之后(After that),我们利用估计的 AoA 信息来识别参考路径。
-
接下来(Next),提取参考路径的信道参数。由于所有路径都承受相同的系统误差,从参考路径提取的信道参数被用于通过简单的比率计算来补偿所有其他路径中的系统误差。
-
然而,比率计算会破坏每条路径的导向矢量,因此最终开发了相控阵重构步骤。
提出的参考路径辅助校准方案的工作流程如图 2 所示。更多细节解释如下。

AoA 的估计依赖于均匀线性阵列 (ULA) 每个天线上的线性相移。然而,公式 ( 3 ) (3) (3) 中与第 p p p 个天线相关的项 e j 2 π n Δ f τ STO , p e^{j2\pi n\Delta f\tau_{\text{STO},p}} ej2πnΔfτSTO,p 会影响由导向矢量 a l [ p ] \boldsymbol{a}_l[p] al[p] 表示的线性相移。为了消除与天线相关的 STO τ STO , p \tau_{\text{STO},p} τSTO,p 的影响,设计了相对 STO 校准。利用原始 CSI,我们首先进行 U U U 点 IFFT 计算,以获得每个天线在时间/时延域的信道冲激响应 (CIR),由下式给出
Q ^ p [ m , u ] = 1 U ∑ n = 0 N − 1 H ^ p [ m , n ] e j 2 π u n / U = 1 U ∑ n = 0 N − 1 ∑ l = 1 L e j θ m a l [ p ] b l e j 2 π n Δ f ( τ STO , p − τ l ) e j φ D , m , l e j 2 π u n U , (4) \hat{\mathbf{Q}}_p[m, u] = \frac{1}{U} \sum_{n=0}^{N-1} \hat{\mathbf{H}}_p[m, n]e^{j2\pi un/U} \\ = \frac{1}{U} \sum_{n=0}^{N-1} \sum_{l=1}^{L} e^{j\theta_m} \boldsymbol{a}_l[p] b_l e^{j2\pi n \Delta f (\tau_{\text{STO},p} - \tau_l)} e^{j\varphi_{D,m,l}} e^{j2\pi u \frac{n}{U}}, \tag{4} Q^p[m,u]=U1n=0∑N−1H^p[m,n]ej2πun/U=U1n=0∑N−1l=1∑Lejθmal[p]blej2πnΔf(τSTO,p−τl)ejφD,m,lej2πuUn,(4)
其中较大的 U U U 可以为相对 STO 校准提供更准确的信息。
由于每个端口 p p p 中的 STO τ STO , p \tau_{\text{STO},p} τSTO,p 不同,路径的 CIR 抽头 (bin) 在每个端口中是变化的。然而,由于传播环境假设为远场,同一路径应位于每个天线上的相同 CIR 抽头内。
基于这一见解(Based on this insight),考虑每个天线之间 CIR 的相关性,并且可以通过寻找 CIR 的最大相关性来估计相对 STO。特别是,来自某个特定天线的 CIR 被固定为参考天线。对于来自其他天线的 CIR,它们被循环滑动以寻找与参考天线 CIR 的最佳匹配。最佳匹配表示在感兴趣区域内 CIR 幅度乘积之和最大的情况。为了降低计算复杂度,在相关性计算中仅考虑显著峰值周围的抽头。
具体而言,首先识别两个最大的局部峰值。对于每个峰值,CIR 功率保持在相应峰值功率 3 3 3 dB 以内的相邻抽头被包含在感兴趣区域中。相对 STO 校准的一个例子如图 3 所示。
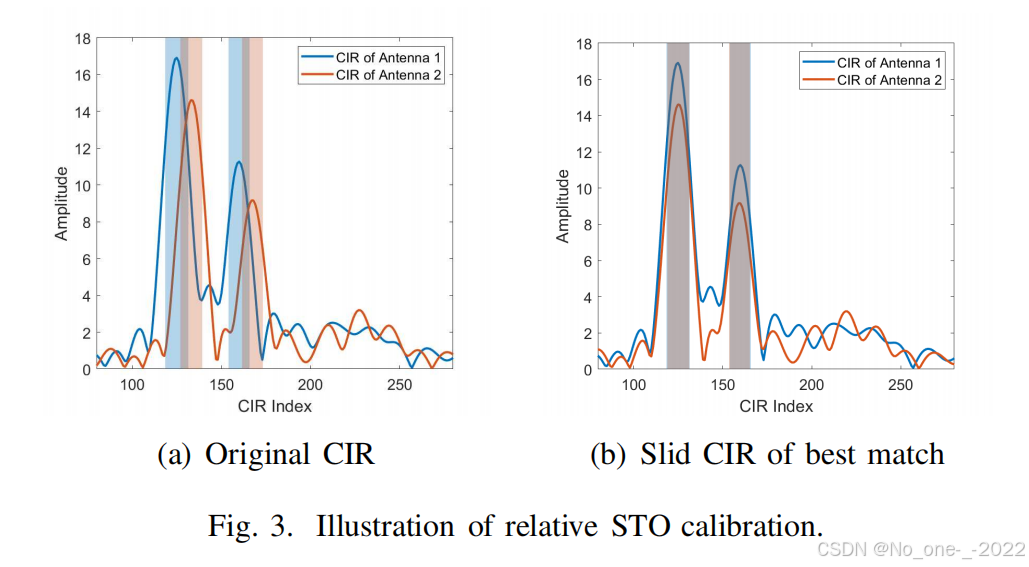
天线 1 和天线 2 的原始 CIR 如图 3(a) 所示。我们固定天线 1 的 CIR 并滑动天线 2 的 CIR,最佳匹配如图 3(b) 所示。天线 p p p 的时延重叠 CIR,记为 Q ~ p [ m , u ] \tilde{\mathbf{Q}}_p[m, u] Q~p[m,u],是经过相对 STO 校准的 CIR,并且天线 p p p 相对于天线 1 的相对 STO 可以表示为 Δ τ , p = τ STO , p − τ STO , 1 \Delta_{\tau,p} = \tau_{\text{STO},p} - \tau_{\text{STO},1} Δτ,p=τSTO,p−τSTO,1。相对 STO 的补偿值因此通过 C p = e j 2 π n Δ f ( τ STO , p − τ STO , 1 ) C_p = e^{j2\pi n \Delta f (\tau_{\text{STO},p} - \tau_{\text{STO},1})} Cp=ej2πnΔf(τSTO,p−τSTO,1) 获得。利用该值,相对 STO 的影响可以通过下式消除
H ~ p [ m , n ] = H ^ p [ m , n ] / C p = e j θ m e j 2 π n Δ f τ STO , 1 ∑ l = 1 L a l [ p ] b l e − j 2 π n Δ f τ l e j φ D , m , l . (5) \begin{aligned} \tilde{\mathbf{H}}_p[m, n] &= \hat{\mathbf{H}}_p[m, n] / C_p \\ &= e^{j\theta_m} e^{j2\pi n \Delta f \tau_{\text{STO},1}} \sum_{l=1}^{L} \boldsymbol{a}_l[p] b_l e^{-j2\pi n \Delta f \tau_l} e^{j\varphi_{D,m,l}}.\end{aligned} \tag{5} H~p[m,n]=H^p[m,n]/Cp=ejθmej2πnΔfτSTO,1l=1∑Lal[p]ble−j2πnΔfτlejφD,m,l.(5)
在相对 STO 校准之后,可以获得处理后的 CSI H ~ p \tilde{\mathbf{H}}_p H~p,它消除了与天线 p p p 相关的项,除了导向矢量。失真的相移项 e j θ m e j 2 π n Δ f τ STO , 1 e^{j\theta_m}e^{j2\pi n \Delta f \tau_{\text{STO},1}} ejθmej2πnΔfτSTO,1 独立于天线,并且可以被视为不会影响 AoA 估计的公共相位偏移,因此,可以进行 AoA 估计。
如果我们直接使用 H ~ p [ m , n ] \tilde{\mathbf{H}}_p[m, n] H~p[m,n] 来估计随天线变化的所有路径的 AoA,我们需要进一步的步骤来匹配每条路径的时延。为了避免这一步,我们直接从 Q ~ p [ m , u ] \tilde{\mathbf{Q}}_p[m, u] Q~p[m,u] 上的几个大的局部峰值提取复振幅,然后估计不同时延抽头的 AoA。典型的 AoA 估计算法,如 MUSIC,随后被用于基于所有天线中处理后的 CIR 进行 AoA 估计。上述步骤利用了毫米波系统中的时延-角度稀疏特征。
所有估计的路径 AoA 都与已知参考路径的 AoA 进行比较。因此,匹配的路径随后被识别为参考路径。通过上述过程,参考路径可以是 LoS 路径或来自参考反射器的 NLoS 路径。如果两者都存在,我们可以简单地选择 LoS 路径作为参考路径。
识别出参考路径后,我们接下来利用给定的参考路径距离和 AoA 信息消除 θ m \theta_m θm 和 τ STO , 1 \tau_{\text{STO},1} τSTO,1 的影响。所提出的校准方案的见解在于,由于参考路径和所有其他路径承受相同的系统误差,参考路径的失真响应有助于消除所有路径中的系统误差。公式 ( 5 ) (5) (5) 中描述的信道矩阵可以分为两部分,即参考路径和非参考路径,由下式给出
H ~ p [ m , n ] = e j θ m e j 2 π n Δ f τ STO , 1 ⏟ remaining system errors ( a ref [ p ] b ref e − j 2 π n Δ f τ ref ⏟ reference path + ∑ l = 1 l ≠ ref L a l [ p ] b l e − j 2 π n Δ f τ l e j φ D , m , l ⏟ non-reference paths ) . (6) \tilde{\mathbf{H}}_p[m, n] = \underbrace{e^{j\theta_m} e^{j2\pi n \Delta f \tau_{\text{STO},1}}}_{\text{remaining system errors}} (\underbrace{\boldsymbol{a}_{\text{ref}}[p] b_{\text{ref}} e^{-j2\pi n \Delta f \tau_{\text{ref}}}}_{\text{reference path}} \\+ \underbrace{\sum_{\substack{l=1 \\ l \neq \text{ref}}}^{L} \boldsymbol{a}_l[p] b_l e^{-j2\pi n \Delta f \tau_l} e^{j\varphi_{D,m,l}}}_{\text{non-reference paths}}). \tag{6} H~p[m,n]=remaining system errors ejθmej2πnΔfτSTO,1(reference path aref[p]brefe−j2πnΔfτref+non-reference paths l=1l=ref∑Lal[p]ble−j2πnΔfτlejφD,m,l).(6)
注意,由于参考路径是静态的,因此没有多普勒频移。由于参考路径的功率强,我们可以直接从参考路径的时延抽头处的 Q ~ p [ m , u r ] \tilde{\mathbf{Q}}_p[m, u_r] Q~p[m,ur] 中提取参考路径的信道参数,数学上可以表示为
Q ~ p [ m , u r ] ≈ e j θ m a ref [ p ] b ref , (7) \tilde{\mathbf{Q}}_p[m, u_r] \approx e^{j\theta_m} \boldsymbol{a}_{\text{ref}}[p] b_{\text{ref}}, \tag{7} Q~p[m,ur]≈ejθmaref[p]bref,(7)
其中第 u r u_r ur 个抽头表示参考路径的 CIR 索引。我们有 τ STO , 1 = τ ref − u r δ \tau_{\text{STO},1} = \tau_{\text{ref}} - u_r \delta τSTO,1=τref−urδ 的关系,其中 τ ref \tau_{\text{ref}} τref 是参考路径的真实时延, δ \delta δ 是一个抽头的持续时间。然后,STO 可以通过补偿消除,时变相移 θ m \theta_m θm 可以通过简单的除法消除,如公式 ( 8 ) (8) (8) 所示。
H ^ p , div [ m , n ] = H ~ p [ m , n ] e − j 2 π n Δ f ( τ ref − u r δ ) / ( Q ~ p [ m , u r ] ∣ Q ~ p [ m , u r ] ∣ ) = e j θ m e j 2 π n Δ f τ STO , 1 ( a ref [ p ] b ref e − j 2 π n Δ f τ ref + ∑ l = 1 l ≠ ref L a l [ p ] b l e − j 2 π n Δ f τ l e j φ D , m , l ) e − j 2 π n Δ f ( τ ref − u r δ ) e j θ m a ref [ p ] = b ref e − j 2 π n Δ f τ ref + ∑ l = 1 l ≠ ref L ( a l [ p ] / a ref [ p ] ) b l e − j 2 π n Δ f τ l e j φ D , m , l (8) \begin{aligned} \hat{\mathbf{H}}_{p,\text{div}}[m, n] &= \tilde{\mathbf{H}}_p[m, n]e^{-j2\pi n\Delta f(\tau_{\text{ref}}-u_{r}\delta)} / \left(\frac{\tilde{\mathbf{Q}}_p[m, u_r]}{|\tilde{\mathbf{Q}}_p[m, u_r]|}\right) \\ &= \frac{e^{j\theta_m} e^{j2\pi n \Delta f \tau_{\text{STO},1}} \left(\boldsymbol{a}_{\text{ref}}[p]b_{\text{ref}}e^{-j2\pi n \Delta f \tau_{\text{ref}}} + \sum_{\substack{l=1 \\ l \neq \text{ref}}}^{L} \boldsymbol{a}_l[p]b_l e^{-j2\pi n \Delta f \tau_l}e^{j\varphi_{D,m,l}}\right)e^{-j2\pi n \Delta f (\tau_{\text{ref}} - u_r \delta)}}{e^{j\theta_m} \boldsymbol{a}_{\text{ref}}[p]} \\ &= b_{\text{ref}}e^{-j2\pi n \Delta f \tau_{\text{ref}}} + \sum_{\substack{l=1 \\ l \neq \text{ref}}}^{L} (\boldsymbol{a}_l[p]/\boldsymbol{a}_{\text{ref}}[p])b_l e^{-j2\pi n \Delta f \tau_l} e^{j\varphi_{D,m,l}} \end{aligned} \tag{8} H^p,div[m,n]=H~p[m,n]e−j2πnΔf(τref−urδ)/(∣Q~p[m,ur]∣Q~p[m,ur])=ejθmaref[p]ejθmej2πnΔfτSTO,1(aref[p]brefe−j2πnΔfτref+∑l=1l=refLal[p]ble−j2πnΔfτlejφD,m,l)e−j2πnΔf(τref−urδ)=brefe−j2πnΔfτref+l=1l=ref∑L(al[p]/aref[p])ble−j2πnΔfτlejφD,m,l(8)
原论文的公式8有错误,请参考新的公式8
H ^ p , div [ m , n ] = H ~ p [ m , n ] e − j 2 π n Δ f ( τ ref − u r δ ) ( Q ~ p [ m , u r ] ∣ Q ~ p [ m , u r ] ∣ ) = e j θ m e j 2 π n Δ f τ STO , 1 ( a ref [ p ] b ref e − j 2 π n Δ f τ ref + ∑ l = 1 l ≠ ref L a l [ p ] b l e − j 2 π n Δ f τ l e j φ D , m , l ) e − j 2 π n Δ f ( τ ref − u r δ ) e j θ m a ref [ p ] ⋅ e j ∠ b ref = ∣ b ref ∣ e − j 2 π n Δ f τ ref + ∑ l = 1 l ≠ ref L a l [ p ] a ref [ p ] ( b l e − j ∠ b ref ) e − j 2 π n Δ f τ l e j φ D , m , l (8-Modified) \begin{aligned} \hat{\mathbf{H}}_{p,\text{div}}[m, n] &= \frac{\tilde{\mathbf{H}}_p[m, n]e^{-j2\pi n\Delta f(\tau_{\text{ref}}-u_{r}\delta)}}{\left( \frac{\tilde{\mathbf{Q}}_p[m, u_r]}{|\tilde{\mathbf{Q}}_p[m, u_r]|} \right)} \\ &= \frac{e^{j\theta_m} e^{j2\pi n \Delta f \tau_{\text{STO},1}} \left(\boldsymbol{a}_{\text{ref}}[p]b_{\text{ref}}e^{-j2\pi n \Delta f \tau_{\text{ref}}} + \sum_{\substack{l=1 \\ l \neq \text{ref}}}^{L} \boldsymbol{a}_l[p]b_l e^{-j2\pi n \Delta f \tau_l}e^{j\varphi_{D,m,l}}\right)e^{-j2\pi n \Delta f (\tau_{\text{ref}} - u_r \delta)}}{e^{j\theta_m} \boldsymbol{a}_{\text{ref}}[p] \cdot e^{j\angle b_{\text{ref}}}} \\ &= |b_{\text{ref}}|e^{-j2\pi n \Delta f \tau_{\text{ref}}} + \sum_{\substack{l=1 \\ l \neq \text{ref}}}^{L} \frac{\boldsymbol{a}_l[p]}{\boldsymbol{a}_{\text{ref}}[p]} \left( b_l e^{-j\angle b_{\text{ref}}} \right) e^{-j2\pi n \Delta f \tau_l} e^{j\varphi_{D,m,l}} \end{aligned} \tag{8-Modified} H^p,div[m,n]=(∣Q~p[m,ur]∣Q~p[m,ur])H~p[m,n]e−j2πnΔf(τref−urδ)=ejθmaref[p]⋅ej∠brefejθmej2πnΔfτSTO,1(aref[p]brefe−j2πnΔfτref+∑l=1l=refLal[p]ble−j2πnΔfτlejφD,m,l)e−j2πnΔf(τref−urδ)=∣bref∣e−j2πnΔfτref+l=1l=ref∑Laref[p]al[p](ble−j∠bref)e−j2πnΔfτlejφD,m,l(8-Modified)
然而,除法之后,导向矢量的特征在公式 ( 8 ) (8) (8) 中被破坏了,这可以通过乘以参考路径方向上的导向矢量 a ref [ p ] \boldsymbol{a}_{\text{ref}}[p] aref[p] 来重建。最终校准后的 CSI 由下式给出
H ^ p , calib [ m , n ] = a ref [ p ] ⋅ H ^ p , div [ m , n ] = a ref [ p ] ( ∣ b ref ∣ e − j 2 π n Δ f τ ref + ∑ l = 1 l ≠ ref L a l [ p ] a ref [ p ] ( b l e − j ∠ b ref ) e − j 2 π n Δ f τ l e j φ D , m , l ) = a ref [ p ] ∣ b ref ∣ e − j 2 π n Δ f τ ref ⏟ Ref. Path (Corrected) + ∑ l = 1 l ≠ ref L a l [ p ] ( b l e − j ∠ b ref ) e − j 2 π n Δ f τ l e j φ D , m , l ⏟ Non-Ref. Paths (Restored) (9-Modified) \begin{aligned} \hat{\mathbf{H}}_{p,\text{calib}}[m, n] &= \boldsymbol{a}_{\text{ref}}[p] \cdot \hat{\mathbf{H}}_{p,\text{div}}[m, n] \\ &= \boldsymbol{a}_{\text{ref}}[p] \left( |b_{\text{ref}}|e^{-j2\pi n \Delta f \tau_{\text{ref}}} + \sum_{\substack{l=1 \\ l \neq \text{ref}}}^{L} \frac{\boldsymbol{a}_l[p]}{\boldsymbol{a}_{\text{ref}}[p]} \left( b_l e^{-j\angle b_{\text{ref}}} \right) e^{-j2\pi n \Delta f \tau_l} e^{j\varphi_{D,m,l}} \right) \\ &= \underbrace{\boldsymbol{a}_{\text{ref}}[p] |b_{\text{ref}}| e^{-j2\pi n \Delta f \tau_{\text{ref}}}}_{\text{Ref. Path (Corrected)}} + \sum_{\substack{l=1 \\ l \neq \text{ref}}}^{L} \underbrace{\boldsymbol{a}_l[p] \left( b_l e^{-j\angle b_{\text{ref}}} \right) e^{-j2\pi n \Delta f \tau_l} e^{j\varphi_{D,m,l}}}_{\text{Non-Ref. Paths (Restored)}} \end{aligned} \tag{9-Modified} H^p,calib[m,n]=aref[p]⋅H^p,div[m,n]=aref[p]
∣bref∣e−j2πnΔfτref+l=1l=ref∑Laref[p]al[p](ble−j∠bref)e−j2πnΔfτlejφD,m,l
=Ref. Path (Corrected)
aref[p]∣bref∣e−j2πnΔfτref+l=1l=ref∑LNon-Ref. Paths (Restored)
al[p](ble−j∠bref)e−j2πnΔfτlejφD,m,l(9-Modified)
校准后的 CSI 现在准备好进行进一步的感知处理,以估计每条路径的角度、时延和多普勒频移。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 6
6 0
0- 0



 已为社区贡献20条内容
已为社区贡献20条内容

所有评论(0)