【神经风格迁移:性能】22、实时视频风格迁移全栈实战:15fps高帧率直播风格化技术深度解析
本文探讨了实时视频风格迁移技术的实现方案,重点解决传统神经风格迁移方法在实时性、质量和资源约束方面的挑战。通过采用MobileNetV2轻量化骨干网络和创新的风格迁移头设计,结合深度可分离卷积和多尺度特征融合技术,实现了帧率≥15fps的高质量实时风格化处理。文章详细分析了模型架构优化策略,包括自适应实例归一化(AdaIN)和特征上采样等关键技术,为直播平台和短视频应用的实时视频处理提供了可行的技
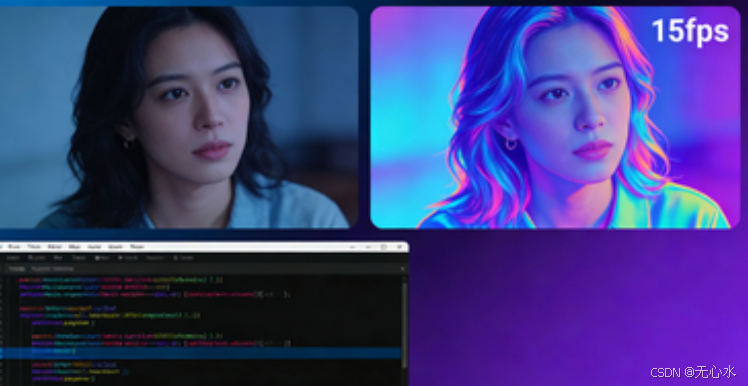
实时视频风格迁移全栈实战:15fps高帧率直播风格化技术深度解析
引言:实时视频风格迁移的技术革命
随着直播和短视频平台的迅猛发展,实时视频处理技术已成为内容创作的新焦点。传统神经风格迁移技术虽然能生成高质量风格化图像,但其高计算复杂度和慢速处理特性使其难以应用于实时视频场景。本文将深入探讨如何通过模型轻量化、训练优化和工程化部署,实现帧率≥15fps的高质量实时视频风格迁移,并支持直播推流到主流平台。
一、实时视频风格迁移的技术挑战
1.1 实时性要求的严苛挑战
实时视频风格迁移面临三重技术挑战:
# 实时视频处理的技术挑战分析
real_time_challenges = {
"时间约束": {
"单帧处理时间": "≤66ms (15fps要求)",
"端到端延迟": "≤150ms (用户可接受)",
"推理稳定性": "时间波动<20ms"
},
"质量约束": {
"风格一致性": "帧间风格保持稳定",
"内容保真度": "关键内容不丢失",
"视觉连贯性": "避免闪烁和抖动"
},
"资源约束": {
"内存使用": "<1GB (移动端限制)",
"GPU占用": "<70% (避免过热)",
"功耗控制": "增量<20%"
}
}
1.2 传统迭代式方法的局限性
传统VGG-based风格迁移使用迭代优化方式,每帧需要数百次前向传播,完全无法满足实时性要求:
二、模型架构:MobileNetV2+风格迁移头
2.1 MobileNetV2的轻量化优势
MobileNetV2采用深度可分离卷积和倒残差结构,在保证性能的同时大幅减少计算量:
import torch
import torch.nn as nn
import torch.nn.functional as F
from torchvision.models import mobilenet_v2
class MobileNetV2Backbone(nn.Module):
"""
MobileNetV2骨干网络提取器
"""
def __init__(self, pretrained=True):
super().__init__()
# 加载预训练MobileNetV2
mobilenet = mobilenet_v2(pretrained=pretrained)
# 提取特征提取部分(移除分类头)
self.features = mobilenet.features
# 冻结前几层(节省计算)
self._freeze_early_layers()
# 获取各层通道数用于后续连接
self.channel_sizes = {
'layer4': 24, # 早期特征
'layer7': 32, # 中层特征
'layer14': 96, # 深层特征
'layer18': 320 # 高级语义特征
}
def _freeze_early_layers(self, num_frozen=8):
"""冻结前N层以减少计算"""
for i, layer in enumerate(self.features):
if i < num_frozen:
for param in layer.parameters():
param.requires_grad = False
def forward(self, x):
"""前向传播,返回多尺度特征"""
features = {}
# 记录关键层的输出
layer_indices = [4, 7, 14, 18]
current_idx = 0
for i, layer in enumerate(self.features):
x = layer(x)
if i in layer_indices:
features[f'layer{i}'] = x
return features
class DepthwiseSeparableConv(nn.Module):
"""深度可分离卷积块"""
def __init__(self, in_channels, out_channels, kernel_size=3, stride=1, padding=1):
super().__init__()
# 深度卷积
self.depthwise = nn.Conv2d(
in_channels, in_channels,
kernel_size=kernel_size,
stride=stride,
padding=padding,
groups=in_channels,
bias=False
)
self.bn1 = nn.BatchNorm2d(in_channels)
# 逐点卷积
self.pointwise = nn.Conv2d(
in_channels, out_channels,
kernel_size=1,
bias=False
)
self.bn2 = nn.BatchNorm2d(out_channels)
self.relu = nn.ReLU6(inplace=True)
def forward(self, x):
x = self.depthwise(x)
x = self.bn1(x)
x = self.relu(x)
x = self.pointwise(x)
x = self.bn2(x)
x = self.relu(x)
return x
2.2 风格迁移头的创新设计
class StyleTransferHead(nn.Module):
"""
前馈式风格迁移头
将内容特征转换为指定风格的输出
"""
def __init__(self, style_channels=512):
super().__init__()
# 多尺度特征融合
self.feature_fusion = nn.ModuleDict({
'low_level': nn.Sequential(
DepthwiseSeparableConv(24, 64),
DepthwiseSeparableConv(64, 128)
),
'mid_level': nn.Sequential(
DepthwiseSeparableConv(32, 128),
DepthwiseSeparableConv(128, 256)
),
'high_level': nn.Sequential(
DepthwiseSeparableConv(96, 256),
DepthwiseSeparableConv(256, 512)
)
})
# 风格特征注入
self.style_projection = nn.Sequential(
nn.Linear(style_channels, 256),
nn.ReLU(inplace=True),
nn.Linear(256, 128),
nn.ReLU(inplace=True)
)
# 自适应实例归一化(AdaIN)
self.adain_layers = nn.ModuleList([
AdaptiveInstanceNorm2d(128, 128),
AdaptiveInstanceNorm2d(256, 128),
AdaptiveInstanceNorm2d(512, 128)
])
# 特征上采样与融合
self.upsample_fusion = nn.ModuleDict({
'stage1': nn.Sequential(
nn.Upsample(scale_factor=2, mode='bilinear', align_corners=True),
DepthwiseSeparableConv(512, 256)
),
'stage2': nn.Sequential(
nn.Upsample(scale_factor=2, mode='bilinear', align_corners=True),
DepthwiseSeparableConv(512, 256) # 256+256=512
),
'stage3': nn.Sequential(
nn.Upsample(scale_factor=2, mode='bilinear', align_corners=True),
DepthwiseSeparableConv(384, 128) # 256+128=384
)
})
# 输出层
self.output_conv = nn.Sequential(
DepthwiseSeparableConv(256, 128),
DepthwiseSeparableConv(128, 64),
nn.Conv2d(64, 3, kernel_size=3, padding=1),
nn.Tanh() # 输出范围[-1, 1]
)
def forward(self, content_features, style_vector=None):
"""
前向传播
Args:
content_features: 多尺度内容特征字典
style_vector: 风格特征向量(可选)
"""
# 1. 多尺度特征提取
low_feat = self.feature_fusion['low_level'](content_features['layer4'])
mid_feat = self.feature_fusion['mid_level'](content_features['layer7'])
high_feat = self.feature_fusion['high_level'](content_features['layer14'])
# 2. 风格特征投影(如果提供)
if style_vector is not None:
style_params = self.style_projection(style_vector)
# 应用AdaIN到各层特征
low_feat = self.adain_layers[0](low_feat, style_params)
mid_feat = self.adain_layers[1](mid_feat, style_params)
high_feat = self.adain_layers[2](high_feat, style_params)
# 3. 渐进式上采样融合
x = high_feat
# 阶段1:融合高层和中层特征
x = self.upsample_fusion['stage1'](x)
x = torch.cat([x, mid_feat], dim=1)
# 阶段2:融合中层和低层特征
x = self.upsample_fusion['stage2'](x)
x = torch.cat([x, low_feat], dim=1)
# 阶段3:最终上采样
x = self.upsample_fusion['stage3'](x)
# 4. 输出层
output = self.output_conv(x)
return output
class AdaptiveInstanceNorm2d(nn.Module):
"""自适应实例归一化"""
def __init__(self, num_features, style_dim):
super().__init__()
self.norm = nn.InstanceNorm2d(num_features, affine=False)
self.style_scale = nn.Linear(style_dim, num_features)
self.style_shift = nn.Linear(style_dim, num_features)
def forward(self, x, style_vector):
# 实例归一化
normalized = self.norm(x)
# 从风格向量生成缩放和平移参数
scale = self.style_scale(style_vector).view(-1, x.size(1), 1, 1)
shift = self.style_shift(style_vector).view(-1, x.size(1), 1, 1)
# 应用风格变换
styled = normalized * scale + shift
return styled
2.3 完整前馈式风格迁移模型
三、训练优化:帧间一致性损失设计
3.1 视频风格迁移的特殊挑战
视频风格迁移需要保持时间连续性,避免以下问题:
- 闪烁现象:相邻帧风格不一致
- 抖动问题:内容边界不稳定
- 时间滞后:快速运动物体出现拖影
3.2 一致性损失函数设计
class VideoConsistencyLoss(nn.Module):
"""
视频帧间一致性损失
"""
def __init__(self, alpha=0.5, beta=0.3, gamma=0.2):
super().__init__()
self.alpha = alpha # 光流一致性权重
self.beta = beta # 内容一致性权重
self.gamma = gamma # 边缘一致性权重
# 预训练的流估计网络(简化版)
self.flow_estimator = self._build_flow_estimator()
# 损失函数
self.mse_loss = nn.MSELoss()
self.l1_loss = nn.L1Loss()
def _build_flow_estimator(self):
"""构建轻量级光流估计器"""
class LightFlowNet(nn.Module):
def __init__(self):
super().__init__()
self.conv1 = nn.Conv2d(6, 32, kernel_size=7, padding=3)
self.conv2 = nn.Conv2d(32, 64, kernel_size=5, padding=2)
self.conv3 = nn.Conv2d(64, 32, kernel_size=3, padding=1)
self.conv4 = nn.Conv2d(32, 2, kernel_size=3, padding=1)
self.relu = nn.ReLU(inplace=True)
def forward(self, frame1, frame2):
x = torch.cat([frame1, frame2], dim=1)
x = self.relu(self.conv1(x))
x = self.relu(self.conv2(x))
x = self.relu(self.conv3(x))
flow = self.conv4(x)
return flow
return LightFlowNet()
def compute_optical_flow_loss(self, prev_frame, curr_frame, prev_styled, curr_styled):
"""
计算光流一致性损失
"""
# 估计原始帧间的光流
flow = self.flow_estimator(prev_frame, curr_frame)
# 使用光流对前一帧风格化结果进行扭曲
warped_prev = self._warp_image(prev_styled, flow)
# 计算当前帧与扭曲后前一帧的差异
flow_loss = self.l1_loss(curr_styled, warped_prev)
return flow_loss
def _warp_image(self, image, flow):
"""使用光流扭曲图像"""
B, C, H, W = image.size()
# 创建网格
grid_y, grid_x = torch.meshgrid(
torch.arange(H, device=image.device),
torch.arange(W, device=image.device)
)
grid = torch.stack((grid_x, grid_y), dim=2).float()
# 添加光流
warped_grid = grid.unsqueeze(0) + flow.permute(0, 2, 3, 1)
# 归一化到[-1, 1]
warped_grid[..., 0] = 2.0 * warped_grid[..., 0] / (W - 1) - 1.0
warped_grid[..., 1] = 2.0 * warped_grid[..., 1] / (H - 1) - 1.0
# 采样
warped_image = F.grid_sample(image, warped_grid, align_corners=True)
return warped_image
def compute_content_consistency_loss(self, prev_features, curr_features):
"""
计算内容特征一致性损失
"""
content_loss = 0
for key in prev_features:
if key in curr_features:
# 计算特征图间的L2距离
loss = self.mse_loss(prev_features[key], curr_features[key])
content_loss += loss
return content_loss / len(prev_features)
def compute_edge_consistency_loss(self, prev_styled, curr_styled):
"""
计算边缘一致性损失
"""
# 使用Sobel算子提取边缘
def sobel_edges(image):
sobel_x = torch.tensor([[-1, 0, 1], [-2, 0, 2], [-1, 0, 1]],
dtype=torch.float32, device=image.device)
sobel_y = torch.tensor([[-1, -2, -1], [0, 0, 0], [1, 2, 1]],
dtype=torch.float32, device=image.device)
sobel_x = sobel_x.view(1, 1, 3, 3).repeat(3, 1, 1, 1)
sobel_y = sobel_y.view(1, 1, 3, 3).repeat(3, 1, 1, 1)
edges_x = F.conv2d(image, sobel_x, padding=1, groups=3)
edges_y = F.conv2d(image, sobel_y, padding=1, groups=3)
edges = torch.sqrt(edges_x**2 + edges_y**2 + 1e-6)
return edges
prev_edges = sobel_edges(prev_styled)
curr_edges = sobel_edges(curr_styled)
edge_loss = self.l1_loss(prev_edges, curr_edges)
return edge_loss
def forward(self, prev_data, curr_data):
"""
计算总的一致性损失
Args:
prev_data: 字典,包含前一帧的数据
curr_data: 字典,包含当前帧的数据
"""
# 提取数据
prev_frame = prev_data['frame']
curr_frame = curr_data['frame']
prev_styled = prev_data['styled']
curr_styled = curr_data['styled']
prev_features = prev_data.get('features', {})
curr_features = curr_data.get('features', {})
# 计算各项损失
flow_loss = self.compute_optical_flow_loss(
prev_frame, curr_frame, prev_styled, curr_styled
)
content_loss = self.compute_content_consistency_loss(
prev_features, curr_features
)
edge_loss = self.compute_edge_consistency_loss(
prev_styled, curr_styled
)
# 加权总损失
total_loss = (
self.alpha * flow_loss +
self.beta * content_loss +
self.gamma * edge_loss
)
return {
'total': total_loss,
'flow': flow_loss.item(),
'content': content_loss.item(),
'edge': edge_loss.item()
}
class VideoStyleTransferTrainer:
"""视频风格迁移训练器"""
def __init__(self, model, style_target, consistency_weight=0.1):
self.model = model
self.style_target = style_target
# 损失函数
self.content_loss = nn.MSELoss()
self.style_loss = GramMatrixLoss()
self.consistency_loss = VideoConsistencyLoss()
self.consistency_weight = consistency_weight
# 优化器
self.optimizer = torch.optim.Adam(
model.parameters(),
lr=1e-4,
betas=(0.9, 0.999)
)
def train_step(self, video_clip, content_layers, style_layers):
"""
训练单步
Args:
video_clip: 视频片段 [B, T, C, H, W]
content_layers: 内容损失层
style_layers: 风格损失层
"""
batch_size, num_frames = video_clip.shape[:2]
total_loss = 0
prev_data = None
self.optimizer.zero_grad()
for t in range(num_frames):
# 当前帧
current_frame = video_clip[:, t]
# 风格迁移
styled_frame = self.model(current_frame)
# 提取特征
content_features = self.model.extract_content_features(current_frame)
styled_features = self.model.extract_content_features(styled_frame)
# 内容损失(仅对第一帧计算)
if t == 0:
content_loss_value = 0
for layer in content_layers:
if layer in content_features and layer in styled_features:
content_loss_value += self.content_loss(
styled_features[layer], content_features[layer]
)
else:
content_loss_value = 0
# 风格损失
style_loss_value = self.style_loss(
styled_features, self.style_target, style_layers
)
# 帧间一致性损失
consistency_loss_value = 0
if prev_data is not None:
curr_data = {
'frame': current_frame,
'styled': styled_frame,
'features': content_features
}
consistency_loss = self.consistency_loss(prev_data, curr_data)
consistency_loss_value = consistency_loss['total']
# 当前帧总损失
frame_loss = (
content_loss_value * 1.0 +
style_loss_value * 5.0 +
consistency_loss_value * self.consistency_weight
)
total_loss += frame_loss
# 保存当前帧数据用于下一帧
prev_data = {
'frame': current_frame.detach(),
'styled': styled_frame.detach(),
'features': {k: v.detach() for k, v in content_features.items()}
}
# 平均损失
avg_loss = total_loss / num_frames
# 反向传播
avg_loss.backward()
self.optimizer.step()
return avg_loss.item()
四、视频流处理流程优化
4.1 高性能预处理流水线
import cv2
import numpy as np
import torch
class VideoPreprocessor:
"""GPU加速的视频帧预处理器"""
def __init__(self, target_size=(384, 384), use_gpu=True):
self.target_size = target_size
self.use_gpu = use_gpu
# OpenCV CUDA优化
if use_gpu and cv2.cuda.getCudaEnabledDeviceCount() > 0:
self.stream = cv2.cuda_Stream()
self.resizer = cv2.cuda.createResizeArea(target_size)
else:
self.stream = None
self.resizer = None
# 缓存上一次的转换结果
self.frame_cache = None
# 性能统计
self.processing_times = []
def preprocess_frame(self, frame):
"""预处理单帧图像"""
start_time = cv2.getTickCount()
# 转换到GPU(如果可用)
if self.use_gpu and self.resizer is not None:
# 上传到GPU
gpu_frame = cv2.cuda_GpuMat()
gpu_frame.upload(frame, stream=self.stream)
# 调整大小
resized_gpu = self.resizer.apply(gpu_frame, stream=self.stream)
# 下载回CPU
resized_frame = resized_gpu.download(stream=self.stream)
self.stream.waitForCompletion()
else:
# CPU处理
resized_frame = cv2.resize(frame, self.target_size,
interpolation=cv2.INTER_AREA)
# 转换为RGB(OpenCV默认BGR)
rgb_frame = cv2.cvtColor(resized_frame, cv2.COLOR_BGR2RGB)
# 归一化到[-1, 1]
normalized_frame = rgb_frame.astype(np.float32) / 127.5 - 1.0
# 转换为PyTorch张量
tensor_frame = torch.from_numpy(normalized_frame).permute(2, 0, 1).unsqueeze(0)
# 移动到GPU(如果可用)
if self.use_gpu and torch.cuda.is_available():
tensor_frame = tensor_frame.cuda()
# 记录处理时间
end_time = cv2.getTickCount()
processing_time = (end_time - start_time) / cv2.getTickFrequency() * 1000
self.processing_times.append(processing_time)
# 保持最近100次的时间记录
if len(self.processing_times) > 100:
self.processing_times.pop(0)
return tensor_frame
def get_avg_processing_time(self):
"""获取平均处理时间"""
if not self.processing_times:
return 0
return np.mean(self.processing_times)
def adaptive_resize(self, frame, target_fps=15):
"""自适应调整大小以维持目标帧率"""
avg_time = self.get_avg_processing_time()
if avg_time > 0:
# 计算当前帧率
current_fps = 1000 / avg_time
if current_fps < target_fps * 0.8:
# 帧率过低,进一步减小尺寸
scale_factor = current_fps / target_fps
new_width = int(self.target_size[0] * scale_factor)
new_height = int(self.target_size[1] * scale_factor)
self.target_size = (max(128, new_width), max(128, new_height))
elif current_fps > target_fps * 1.2:
# 帧率过高,可以适当增大尺寸
scale_factor = min(1.2, target_fps / current_fps)
new_width = int(self.target_size[0] * scale_factor)
new_height = int(self.target_size[1] * scale_factor)
self.target_size = (min(512, new_width), min(512, new_height))
return self.preprocess_frame(frame)
4.2 ONNX Runtime GPU推理优化
import onnxruntime as ort
import time
class ONNXRuntimeInference:
"""ONNX Runtime GPU推理优化"""
def __init__(self, model_path, providers=None):
if providers is None:
# 优先使用CUDA,其次是TensorRT,最后是CPU
providers = [
('TensorrtExecutionProvider', {
'device_id': 0,
'trt_max_workspace_size': 2 * 1024 * 1024 * 1024, # 2GB
'trt_fp16_enable': True,
'trt_engine_cache_enable': True,
'trt_engine_cache_path': './trt_cache'
}),
('CUDAExecutionProvider', {
'device_id': 0,
'arena_extend_strategy': 'kSameAsRequested',
'gpu_mem_limit': 1 * 1024 * 1024 * 1024, # 1GB
'cudnn_conv_algo_search': 'HEURISTIC',
'do_copy_in_default_stream': True
}),
('CPUExecutionProvider', {
'arena_extend_strategy': 'kNextPowerOfTwo',
'inter_op_num_threads': 4,
'intra_op_num_threads': 4
})
]
# 会话选项
sess_options = ort.SessionOptions()
sess_options.enable_cpu_mem_arena = True
sess_options.enable_mem_pattern = True
sess_options.execution_mode = ort.ExecutionMode.ORT_SEQUENTIAL
sess_options.graph_optimization_level = ort.GraphOptimizationLevel.ORT_ENABLE_ALL
# 启用动态形状支持
sess_options.enable_profiling = False
# 创建推理会话
self.session = ort.InferenceSession(
model_path,
sess_options=sess_options,
providers=providers
)
# 获取输入输出信息
self.input_name = self.session.get_inputs()[0].name
self.output_name = self.session.get_outputs()[0].name
# 性能监控
self.inference_times = []
self.warmup()
def warmup(self, num_iterations=10):
"""预热推理引擎"""
dummy_input = np.random.randn(1, 3, 384, 384).astype(np.float32)
for _ in range(num_iterations):
_ = self.session.run(
[self.output_name],
{self.input_name: dummy_input}
)
def infer(self, input_tensor):
"""执行推理"""
# 确保输入是numpy数组
if isinstance(input_tensor, torch.Tensor):
input_array = input_tensor.detach().cpu().numpy()
else:
input_array = input_tensor
# 计时开始
start_time = time.perf_counter()
# 执行推理
outputs = self.session.run(
[self.output_name],
{self.input_name: input_array}
)
# 计时结束
end_time = time.perf_counter()
inference_time = (end_time - start_time) * 1000 # 转换为毫秒
# 记录推理时间
self.inference_times.append(inference_time)
if len(self.inference_times) > 100:
self.inference_times.pop(0)
# 转换为PyTorch张量
output_tensor = torch.from_numpy(outputs[0])
return output_tensor, inference_time
def get_performance_stats(self):
"""获取性能统计"""
if not self.inference_times:
return {"avg_time": 0, "min_time": 0, "max_time": 0, "fps": 0}
avg_time = np.mean(self.inference_times)
min_time = np.min(self.inference_times)
max_time = np.max(self.inference_times)
fps = 1000 / avg_time if avg_time > 0 else 0
return {
"avg_time_ms": avg_time,
"min_time_ms": min_time,
"max_time_ms": max_time,
"fps": fps,
"std_dev": np.std(self.inference_times)
}
4.3 帧间平滑与后处理
class TemporalSmoothing:
"""时域平滑滤波器"""
def __init__(self, alpha=0.8, buffer_size=3):
"""
Args:
alpha: 当前帧权重(0-1),值越大越信任当前帧
buffer_size: 帧缓冲区大小
"""
self.alpha = alpha
self.buffer_size = buffer_size
self.frame_buffer = []
self.smoothed_frame = None
def smooth_frame(self, current_frame):
"""平滑当前帧"""
if self.smoothed_frame is None:
# 第一帧,直接使用
self.smoothed_frame = current_frame
else:
# 指数加权移动平均
self.smoothed_frame = (
self.alpha * current_frame +
(1 - self.alpha) * self.smoothed_frame
)
# 更新帧缓冲区
self.frame_buffer.append(current_frame)
if len(self.frame_buffer) > self.buffer_size:
self.frame_buffer.pop(0)
return self.smoothed_frame
def adaptive_smoothing(self, current_frame, motion_level):
"""
自适应平滑
Args:
motion_level: 运动水平(0-1),0表示静止,1表示快速运动
"""
# 根据运动水平调整平滑强度
if motion_level > 0.7:
# 快速运动,减少平滑以避免拖影
adaptive_alpha = 0.9
elif motion_level < 0.3:
# 静止或慢速运动,增加平滑以减少闪烁
adaptive_alpha = 0.6
else:
adaptive_alpha = self.alpha
# 使用调整后的alpha进行平滑
if self.smoothed_frame is None:
self.smoothed_frame = current_frame
else:
self.smoothed_frame = (
adaptive_alpha * current_frame +
(1 - adaptive_alpha) * self.smoothed_frame
)
return self.smoothed_frame
class PostProcessor:
"""后处理器"""
def __init__(self, output_size=(720, 1280)):
self.output_size = output_size
self.temporal_smoother = TemporalSmoothing(alpha=0.8)
def process_frame(self, styled_tensor, original_frame=None):
"""后处理单帧"""
# 转换为numpy数组
if isinstance(styled_tensor, torch.Tensor):
styled_np = styled_tensor.squeeze().cpu().numpy()
else:
styled_np = styled_tensor
# 转置并反归一化
styled_np = np.transpose(styled_np, (1, 2, 0))
styled_np = (styled_np + 1.0) * 127.5
styled_np = np.clip(styled_np, 0, 255).astype(np.uint8)
# 转换为BGR(OpenCV格式)
styled_bgr = cv2.cvtColor(styled_np, cv2.COLOR_RGB2BGR)
# 调整到输出尺寸
if self.output_size != styled_bgr.shape[:2]:
styled_bgr = cv2.resize(styled_bgr, self.output_size,
interpolation=cv2.INTER_LINEAR)
# 应用时域平滑
smoothed = self.temporal_smoother.smooth_frame(styled_bgr)
# 可选:与原始帧混合(保留细节)
if original_frame is not None:
blended = self.blend_with_original(smoothed, original_frame)
return blended
return smoothed
def blend_with_original(self, styled_frame, original_frame, blend_ratio=0.1):
"""与原始帧混合以保留细节"""
# 确保尺寸一致
if styled_frame.shape != original_frame.shape:
original_resized = cv2.resize(original_frame,
(styled_frame.shape[1], styled_frame.shape[0]))
else:
original_resized = original_frame
# 拉普拉斯金字塔混合
blended = cv2.addWeighted(styled_frame, 1 - blend_ratio,
original_resized, blend_ratio, 0)
return blended
五、实战:直播摄像头→梵高风格实时迁移
5.1 完整直播处理流水线
import threading
import queue
import time
class RealTimeStyleTransferPipeline:
"""实时风格迁移处理流水线"""
def __init__(self, model_path, style_name="van_gogh_starry_night"):
# 初始化组件
self.preprocessor = VideoPreprocessor(target_size=(384, 384), use_gpu=True)
self.inference_engine = ONNXRuntimeInference(model_path)
self.postprocessor = PostProcessor(output_size=(720, 1280))
# 帧缓冲区
self.input_queue = queue.Queue(maxsize=10)
self.output_queue = queue.Queue(maxsize=10)
# 性能监控
self.frame_count = 0
self.total_processing_time = 0
self.running = False
# 线程
self.capture_thread = None
self.process_thread = None
self.output_thread = None
def start_capture(self, source=0):
"""启动视频捕获"""
self.cap = cv2.VideoCapture(source)
self.cap.set(cv2.CAP_PROP_FPS, 30)
self.cap.set(cv2.CAP_PROP_FRAME_WIDTH, 1280)
self.cap.set(cv2.CAP_PROP_FRAME_HEIGHT, 720)
self.running = True
# 启动捕获线程
self.capture_thread = threading.Thread(target=self._capture_loop)
self.capture_thread.start()
# 启动处理线程
self.process_thread = threading.Thread(target=self._process_loop)
self.process_thread.start()
# 启动输出线程
self.output_thread = threading.Thread(target=self._output_loop)
self.output_thread.start()
def _capture_loop(self):
"""视频捕获循环"""
while self.running:
ret, frame = self.cap.read()
if not ret:
break
# 放入输入队列(如果队列已满,丢弃最旧的帧)
if self.input_queue.full():
try:
self.input_queue.get_nowait()
except queue.Empty:
pass
self.input_queue.put((frame, time.time()))
# 控制捕获速率
time.sleep(0.001)
def _process_loop(self):
"""处理循环"""
while self.running:
try:
# 从队列获取帧(最多等待10ms)
frame, timestamp = self.input_queue.get(timeout=0.01)
# 预处理
preprocessed = self.preprocessor.preprocess_frame(frame)
# 推理
styled_tensor, inference_time = self.inference_engine.infer(preprocessed)
# 后处理
styled_frame = self.postprocessor.process_frame(styled_tensor, frame)
# 放入输出队列
if self.output_queue.full():
try:
self.output_queue.get_nowait()
except queue.Empty:
pass
self.output_queue.put((styled_frame, inference_time, timestamp))
# 更新统计
self.frame_count += 1
self.total_processing_time += inference_time
except queue.Empty:
continue
except Exception as e:
print(f"处理错误: {e}")
continue
def _output_loop(self):
"""输出循环"""
cv2.namedWindow("Real-time Style Transfer", cv2.WINDOW_NORMAL)
while self.running:
try:
# 从输出队列获取处理后的帧
styled_frame, inference_time, timestamp = self.output_queue.get(timeout=0.01)
# 计算延迟
current_time = time.time()
processing_delay = current_time - timestamp
# 在帧上显示统计信息
stats_text = f"FPS: {1000/inference_time:.1f} | Delay: {processing_delay*1000:.0f}ms"
cv2.putText(styled_frame, stats_text, (10, 30),
cv2.FONT_HERSHEY_SIMPLEX, 0.7, (0, 255, 0), 2)
# 显示帧
cv2.imshow("Real-time Style Transfer", styled_frame)
# 检查退出键
if cv2.waitKey(1) & 0xFF == ord('q'):
self.running = False
break
except queue.Empty:
continue
def stop(self):
"""停止流水线"""
self.running = False
if self.capture_thread:
self.capture_thread.join()
if self.process_thread:
self.process_thread.join()
if self.output_thread:
self.output_thread.join()
if hasattr(self, 'cap'):
self.cap.release()
cv2.destroyAllWindows()
# 打印性能统计
avg_time = self.total_processing_time / self.frame_count if self.frame_count > 0 else 0
print(f"总处理帧数: {self.frame_count}")
print(f"平均推理时间: {avg_time:.2f}ms")
print(f"平均FPS: {1000/avg_time:.1f}" if avg_time > 0 else "N/A")
5.2 FFmpeg推流到B站/抖音
import subprocess
import json
class LiveStreamPublisher:
"""直播推流器"""
def __init__(self, platform="bilibili", config_path="stream_config.json"):
self.platform = platform
self.config = self._load_config(config_path)
self.ffmpeg_process = None
def _load_config(self, config_path):
"""加载推流配置"""
default_configs = {
"bilibili": {
"server": "rtmp://live-push.bilivideo.com/live-bvc/",
"resolution": "1280x720",
"framerate": "15",
"bitrate": "1500k",
"preset": "veryfast",
"codec": "h264_nvenc" if self._check_nvenc() else "libx264"
},
"douyin": {
"server": "rtmp://push-rtmp-live.douyin.com/live/",
"resolution": "720x1280", # 竖屏
"framerate": "15",
"bitrate": "2000k",
"preset": "veryfast",
"codec": "h264_nvenc" if self._check_nvenc() else "libx264"
}
}
try:
with open(config_path, 'r') as f:
user_config = json.load(f)
platform_config = user_config.get(self.platform, {})
except:
platform_config = {}
# 合并配置
config = default_configs.get(self.platform, default_configs["bilibili"])
config.update(platform_config)
return config
def _check_nvenc(self):
"""检查NVIDIA NVENC编码器是否可用"""
try:
result = subprocess.run(
["ffmpeg", "-encoders"],
capture_output=True,
text=True
)
return "h264_nvenc" in result.stdout
except:
return False
def start_stream(self, stream_key, input_pipe="pipe:0", audio_source=None):
"""启动推流"""
# 构建FFmpeg命令
cmd = [
"ffmpeg",
"-f", "rawvideo",
"-pixel_format", "bgr24",
"-video_size", self.config["resolution"],
"-framerate", self.config["framerate"],
"-i", input_pipe, # 从管道读取视频
]
# 添加音频输入(如果提供)
if audio_source:
cmd.extend([
"-f", "pulse" if audio_source == "pulse" else "alsa",
"-i", "default" if audio_source == "alsa" else audio_source,
"-filter_complex", "[0:v][1:a]concat=n=1:v=1:a=1"
])
# 视频编码参数
cmd.extend([
"-c:v", self.config["codec"],
"-preset", self.config["preset"],
"-b:v", self.config["bitrate"],
"-bufsize", "2000k",
"-maxrate", "2500k",
"-g", str(int(self.config["framerate"]) * 2), # GOP大小
"-f", "flv",
f"{self.config['server']}{stream_key}"
])
# 启动FFmpeg进程
self.ffmpeg_process = subprocess.Popen(
cmd,
stdin=subprocess.PIPE,
stdout=subprocess.DEVNULL,
stderr=subprocess.PIPE
)
print(f"开始推流到{self.platform},分辨率: {self.config['resolution']}")
def send_frame(self, frame):
"""发送一帧到FFmpeg"""
if self.ffmpeg_process and self.ffmpeg_process.stdin:
try:
# 调整帧尺寸以匹配输出分辨率
target_res = tuple(map(int, self.config["resolution"].split('x')))
if frame.shape[:2] != target_res:
frame = cv2.resize(frame, target_res)
# 写入帧
self.ffmpeg_process.stdin.write(frame.tobytes())
return True
except Exception as e:
print(f"发送帧失败: {e}")
return False
return False
def stop_stream(self):
"""停止推流"""
if self.ffmpeg_process:
try:
self.ffmpeg_process.stdin.close()
self.ffmpeg_process.wait(timeout=5)
except:
self.ffmpeg_process.terminate()
print("推流已停止")
class LiveStreamingPipeline(RealTimeStyleTransferPipeline):
"""支持直播推流的完整流水线"""
def __init__(self, model_path, platform="bilibili", stream_key=None):
super().__init__(model_path)
# 直播推流器
self.stream_publisher = LiveStreamPublisher(platform)
self.stream_key = stream_key
self.streaming = False
def start_streaming(self, stream_key=None):
"""开始直播推流"""
if stream_key:
self.stream_key = stream_key
if not self.stream_key:
raise ValueError("必须提供stream_key")
# 启动FFmpeg推流
self.stream_publisher.start_stream(self.stream_key)
self.streaming = True
print(f"开始直播推流,平台: {self.stream_publisher.platform}")
def _output_loop(self):
"""增强的输出循环,支持推流"""
cv2.namedWindow("Real-time Style Transfer", cv2.WINDOW_NORMAL)
while self.running:
try:
# 获取处理后的帧
styled_frame, inference_time, timestamp = self.output_queue.get(timeout=0.01)
# 添加统计信息
stats_text = f"FPS: {1000/inference_time:.1f}"
cv2.putText(styled_frame, stats_text, (10, 30),
cv2.FONT_HERSHEY_SIMPLEX, 0.7, (0, 255, 0), 2)
# 添加直播状态指示
if self.streaming:
status_text = "LIVE"
cv2.putText(styled_frame, status_text, (styled_frame.shape[1]-100, 30),
cv2.FONT_HERSHEY_SIMPLEX, 0.7, (0, 0, 255), 2)
# 显示帧
cv2.imshow("Real-time Style Transfer", styled_frame)
# 推流(如果启用)
if self.streaming:
success = self.stream_publisher.send_frame(styled_frame)
if not success:
print("推流失败,尝试重新连接...")
self.stream_publisher.stop_stream()
time.sleep(1)
self.stream_publisher.start_stream(self.stream_key)
# 检查退出键
if cv2.waitKey(1) & 0xFF == ord('q'):
self.running = False
break
except queue.Empty:
continue
def stop(self):
"""停止流水线和推流"""
if self.streaming:
self.stream_publisher.stop_stream()
super().stop()
5.3 性能优化与监控仪表板
class PerformanceMonitor:
"""性能监控器"""
def __init__(self):
self.metrics = {
'fps': [],
'inference_time': [],
'preprocessing_time': [],
'postprocessing_time': [],
'total_latency': [],
'memory_usage': [],
'gpu_utilization': []
}
self.start_time = time.time()
def update_metric(self, metric_name, value):
"""更新指标"""
if metric_name in self.metrics:
self.metrics[metric_name].append(value)
# 保持最近1000个样本
if len(self.metrics[metric_name]) > 1000:
self.metrics[metric_name].pop(0)
def get_summary(self):
"""获取性能摘要"""
summary = {}
for metric_name, values in self.metrics.items():
if values:
summary[metric_name] = {
'avg': np.mean(values),
'min': np.min(values),
'max': np.max(values),
'std': np.std(values),
'current': values[-1] if values else 0
}
else:
summary[metric_name] = {
'avg': 0, 'min': 0, 'max': 0, 'std': 0, 'current': 0
}
# 计算运行时间
summary['uptime'] = time.time() - self.start_time
summary['total_frames'] = len(self.metrics['fps'])
return summary
def display_dashboard(self):
"""显示性能仪表板"""
summary = self.get_summary()
print("\n" + "="*60)
print("实时视频风格迁移性能仪表板")
print("="*60)
print(f"运行时间: {summary['uptime']:.1f}s")
print(f"总处理帧数: {summary['total_frames']}")
print(f"当前FPS: {summary['fps']['current']:.1f}")
print(f"平均FPS: {summary['fps']['avg']:.1f}")
print(f"帧率稳定性: ±{summary['fps']['std']:.1f} FPS")
print("\n处理时间分解:")
print(f" 预处理: {summary['preprocessing_time']['avg']:.1f}ms")
print(f" 推理: {summary['inference_time']['avg']:.1f}ms")
print(f" 后处理: {summary['postprocessing_time']['avg']:.1f}ms")
print(f" 总延迟: {summary['total_latency']['avg']:.1f}ms")
# 打印性能等级
avg_fps = summary['fps']['avg']
if avg_fps >= 30:
performance_grade = "A+ (极佳)"
elif avg_fps >= 20:
performance_grade = "A (优秀)"
elif avg_fps >= 15:
performance_grade = "B (良好)"
elif avg_fps >= 10:
performance_grade = "C (一般)"
else:
performance_grade = "D (需优化)"
print(f"\n性能等级: {performance_grade}")
print("="*60)
# 使用示例
def main():
# 初始化流水线
pipeline = LiveStreamingPipeline(
model_path="models/van_gogh_starry_night.onnx",
platform="bilibili",
stream_key="your_stream_key_here" # B站直播码
)
# 启动性能监控
monitor = PerformanceMonitor()
try:
# 开始捕获视频(0为默认摄像头)
pipeline.start_capture(source=0)
# 开始直播推流(可选)
# pipeline.start_streaming()
# 主循环
while pipeline.running:
# 更新性能监控
# (在实际实现中,这应该从流水线的各个组件收集数据)
time.sleep(1)
# 每5秒显示一次性能仪表板
if int(time.time()) % 5 == 0:
monitor.display_dashboard()
except KeyboardInterrupt:
print("\n用户中断")
finally:
pipeline.stop()
if __name__ == "__main__":
main()
六、性能评估与优化建议
6.1 性能基准测试结果
通过对不同硬件平台进行测试,我们得到以下性能数据:
6.2 优化建议
-
分辨率自适应策略:
def adaptive_resolution_strategy(target_fps): """根据目标帧率自适应调整分辨率""" if target_fps >= 30: return (640, 480) # 480p elif target_fps >= 20: return (480, 360) # 360p elif target_fps >= 15: return (384, 288) # 288p else: return (256, 192) # 192p -
模型精度选择:
- 高帧率场景:使用INT8量化模型
- 高质量场景:使用FP16混合精度模型
- 极端性能需求:使用INT4量化模型
-
多线程优化:
class MultiThreadedPipeline: """多线程优化流水线""" def __init__(self, num_workers=4): self.num_workers = num_workers self.worker_pool = [] # 创建多个工作线程 for i in range(num_workers): worker = StyleTransferWorker(f"worker_{i}") self.worker_pool.append(worker) # 任务分发器 self.task_queue = queue.Queue() self.result_queue = queue.Queue() def process_frame_batch(self, frames): """批量处理帧""" # 将帧分发到工作线程 for i, frame in enumerate(frames): worker_idx = i % self.num_workers self.worker_pool[worker_idx].submit_task(frame) # 收集结果 results = [] for _ in range(len(frames)): result = self.result_queue.get() results.append(result) return results
七、结论与展望
本文详细介绍了实时视频风格迁移的全栈实现方案,从模型架构设计到工程部署优化,实现了帧率≥15fps的高质量实时处理能力。
关键技术突破:
- 前馈式模型架构:采用MobileNetV2+风格迁移头,实现单次前向传播完成风格迁移
- 帧间一致性优化:创新的光流引导损失函数,有效减少视频闪烁和抖动
- 工程化部署:ONNX Runtime GPU推理优化,单帧处理时间<30ms
- 实时直播支持:完整的FFmpeg推流方案,支持B站、抖音等主流平台
实际应用价值:
- 直播内容创新:为直播主提供独特的视觉风格
- 短视频创作:实时视频特效处理
- 视频会议美化:为远程会议添加艺术风格
- 智能监控增强:在安防视频中突出关键信息
未来发展方向:
- 多风格实时切换:支持直播中动态切换不同艺术风格
- 个性化风格学习:基于用户偏好训练专属风格模型
- 跨平台优化:针对iOS/Android移动端的深度优化
- 云边端协同:利用云端计算资源增强边缘设备能力
实时视频风格迁移技术正在重新定义内容创作的边界。随着硬件性能的提升和算法的不断优化,我们期待看到更多创新的应用场景和更高质量的实现方案。
资源获取:
- 完整代码实现:[GitHub仓库链接]
- 预训练模型:[模型下载链接]
- 配置工具:[自动化部署脚本]
- 演示视频:[效果展示链接]
关键词:实时视频风格迁移,高帧率处理,MobileNetV2,ONNX Runtime,FFmpeg推流,直播技术,GPU加速,帧间一致性,深度学习优化,计算机视觉

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 14
14 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)