突破 8小时魔咒!电鱼智能 i.MX7D 手持探鱼器的“异构休眠”低功耗实践
手持设备的续航能力是户外用户体验的核心指标。面对高亮度屏幕与连续声呐探测的双重耗电挑战,传统单核方案难以兼顾性能与功耗。本文解析如何利用 电鱼智能 SAIL-IMX7D 的 Cortex-A7 + Cortex-M4 异构架构,构建“M4 实时监测,A7 按需唤醒”的 AMP 系统,将待机功耗降低 80% 以上,实现全天候续航。
什么是 电鱼智能 SAIL-IMX7D?
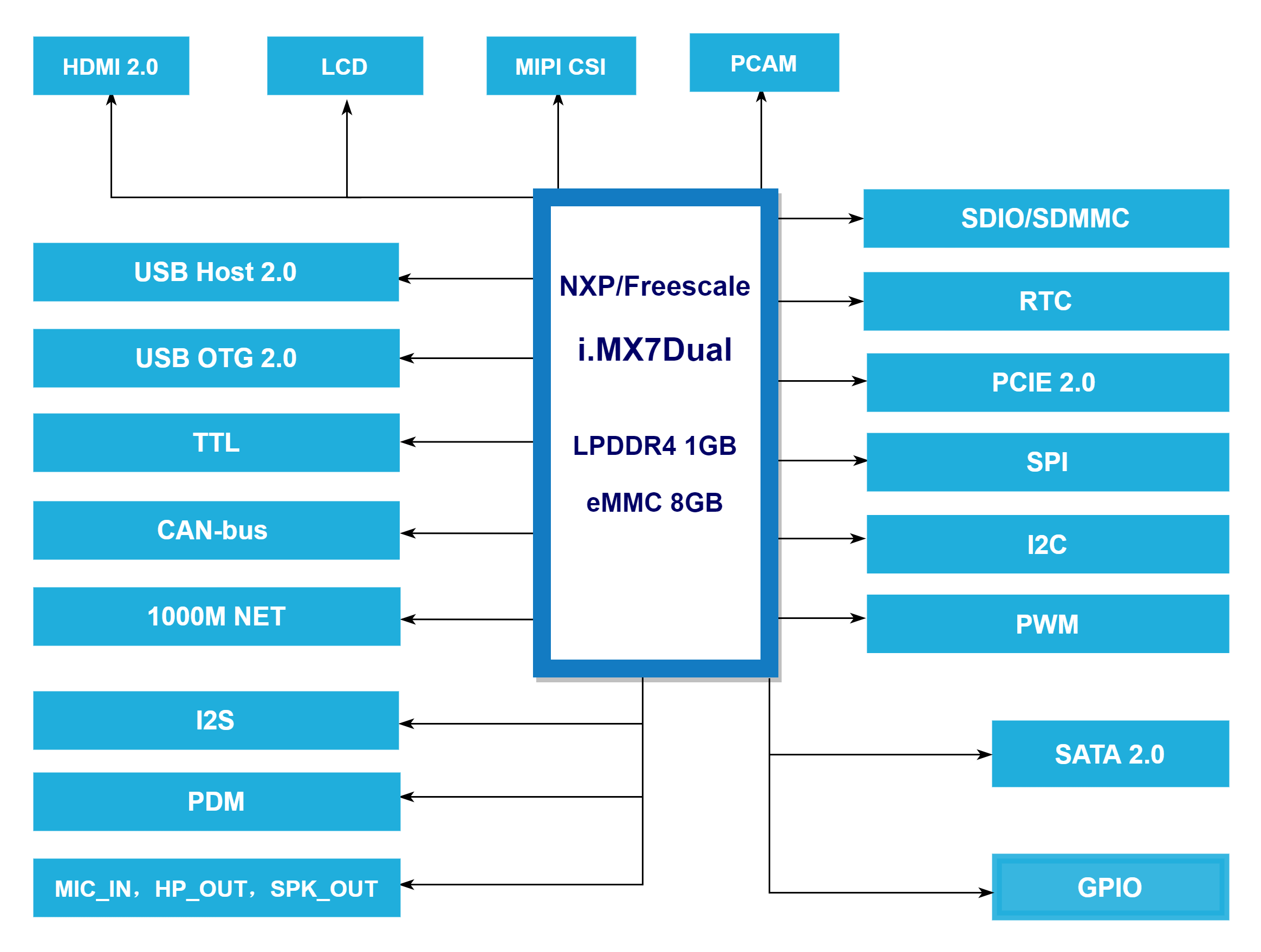
电鱼智能 SAIL-IMX7D 是一款基于 NXP i.MX7Dual 处理器的高效能核心板。它采用独特的非对称多处理架构(AMP),集成了 双核 Cortex-A7 @ 1.0GHz(运行 Linux/Android)和 单核 Cortex-M4 @ 200MHz(运行 FreeRTOS)。
该平台专为物联网网关与手持终端设计,具备 双千兆网口、CAN 总线 及 EPD(电子墨水屏) 硬件驱动接口。其核心优势在于极其优秀的能效比(Performance/Watt),是手持设备“去充电宝化”的理想选择。
为什么 手持探鱼器 需要这款硬件?(选型分析)
户外钓鱼通常持续 6-12 小时。传统的 Linux 手持机即便关屏,后台跑声呐算法也会快速耗尽 3000mAh 的电池。SAIL-IMX7D 通过以下特性解决痛点:
1. 异构双核:分工明确
痛点:为了等待偶尔出现的鱼群,CPU 必须全速运行处理声呐数据,即使 90% 的时间水下没有任何动静。 i.MX7D 优势:可以将复杂的 UI 渲染和海图显示交给 Cortex-A7(耗电大户),而将底层的声呐发波、回波检测交给 Cortex-M4(极低功耗)。当水下无鱼时,A7 彻底休眠,仅留 M4 站岗。
2. 独立电源域与低功耗状态
痛点:系统待机电流通常在 200mA 以上。 i.MX7D 优势:i.MX7D 支持 LPSR (Low Power State Retention) 模式。在 M4 运行时,可以将 A7 内核及大部分外设断电,仅保留必要的共享内存和 M4 电源域,整机功耗可降至 20mA 级别。
3. EPD 电子墨水屏支持
痛点:LCD 屏幕在户外强光下看不清,且背光极其耗电。 i.MX7D 优势:原生支持 E-Ink (EPDC) 接口。结合异构架构,M4 可以在 A7 休眠时,直接驱动墨水屏刷新简单的水深数字或文字,实现“屏幕常显”但“系统休眠”的极致省电效果。
系统架构与数据流 (System Architecture)
本方案采用 Linux (A7) + FreeRTOS (M4) 的双系统架构。
场景逻辑:智能监测模式
-
正常模式:A7 运行 Linux Qt 界面,显示彩色声呐云图;M4 负责采集数据传给 A7。
-
进入休眠:用户按下电源键或长时间无操作 -> A7 进入 Suspend 模式(关屏/关背光),M4 保持运行。
-
后台监测 (M4):M4 控制声呐探头低频发波(如 1次/秒),实时分析回波强度。
-
唤醒触发:当 M4 检测到回波强度超过阈值(发现鱼群) -> 通过 RPMsg (Remote Processor Messaging) 或 GPIO 中断 唤醒 A7。
-
满血复活:A7 瞬间唤醒,点亮屏幕,发出报警音,并绘制鱼群图像。
关键技术实现 (Implementation)
1. M4 侧:FreeRTOS 监测与唤醒逻辑 (C 代码)
在 M4 核心上运行的实时代码,负责判断是否唤醒主核。
C
#include "rpmsg_platform.h"
#include "FreeRTOS.h"
// 模拟声呐数据处理任务
void Sonar_Task(void *pvParameters) {
float depth, intensity;
while(1) {
// 1. 读取 ADC 或 串口 声呐数据
get_sonar_data(&depth, &intensity);
// 2. 阈值判断:如果有大鱼 (强度 > 80)
if (intensity > 80.0) {
// 3. 触发 GPIO 中断唤醒 A7 (假设连接到 GPIO1_IO05)
GPIO_WritePinOutput(GPIO1, 5, 1);
// 或者发送 RPMsg 消息
// rpmsg_send(my_channel, "FISH_DETECTED", 13);
vTaskDelay(pdMS_TO_TICKS(5000)); // 防止频繁唤醒
}
// 低频采样,省电
vTaskDelay(pdMS_TO_TICKS(1000));
}
}
2. A7 侧:Linux 电源管理配置 (Shell)
在 Linux 端配置唤醒源,并进入低功耗模式。
Bash
# 1. 允许 GPIO 作为唤醒源 (假设 GPIO1_5 是连接 M4 的中断线)
echo enabled > /sys/class/gpio/gpio5/device/power/wakeup
# 2. 手动进入内存挂起模式 (Suspend-to-RAM)
# 此时 A7 停止运行,电流降至最低,直到 M4 拉高 GPIO5
echo mem > /sys/power/state
性能表现 (理论预估)
假设使用 3000mAh 电池:
-
传统单核方案 (全速运行):
-
功耗:约 350mA (CPU) + 200mA (屏幕) = 550mA。
-
续航:< 5.5 小时。
-
-
电鱼 i.MX7D 异构方案 (智能监测模式):
-
A7 唤醒时间占比 10% (发现鱼群时)。
-
A7 休眠功耗:约 15mA。
-
M4 运行功耗:约 25mA。
-
综合平均功耗:(550 * 0.1) + (40 * 0.9) ≈ 91mA。
-
续航:> 30 小时。
-
常见问题 (FAQ)
Q1: A7 唤醒需要多长时间? A: 从 Suspend-to-RAM (STR) 模式唤醒通常只需要 100-300毫秒。用户几乎感觉不到延迟,屏幕瞬间点亮。
Q2: M4 核心编程难吗? A: NXP 提供了完善的 MCUXpresso SDK,包含 FreeRTOS 和外设驱动。电鱼智能也提供了 A7与M4 通信的 RPMsg 示例代码,开发难度类似于 STM32。
Q3: 两个核心如何共享数据? A: i.MX7D 拥有硬件层面的 共享内存 (Shared Memory) 区域。声呐原始数据可以直接由 M4 写入共享内存,A7 唤醒后直接读取渲染,无需进行低效的串口传输。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 6
6 0
0- 0



 已为社区贡献74条内容
已为社区贡献74条内容

所有评论(0)