田间地头的 AI 专家:基于电鱼智能 RK3588 实现农作物病害识别的边缘推理实践
智慧农业正在经历从“自动化”向“智能化”的转型。本文探讨如何利用 电鱼智能 RK3588 的 6TOPS 高性能 NPU,将深度学习模型部署在边缘侧,实现毫秒级的农作物病害实时识别。该方案旨在解决农田网络环境下云端推理高延迟、数据隐私顾虑及硬件部署困难等核心痛点,构建离线化、智能化的植保监测终端。
什么是 电鱼智能 RK3588?
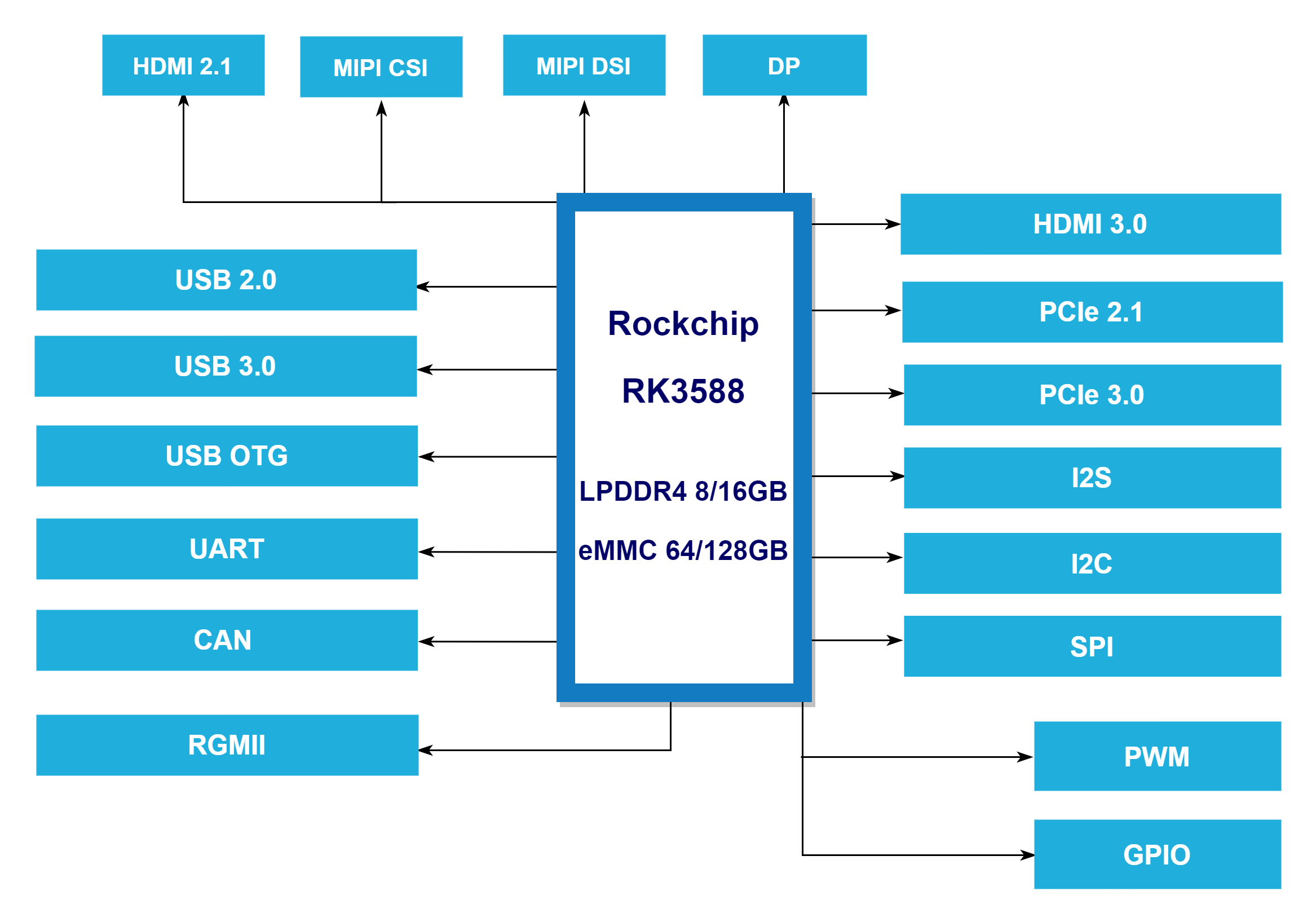
电鱼智能 RK3588 是一款专为边缘 AI 与高性能计算设计的旗舰级工业核心平台。它搭载八核 ARM 处理器(4×A76 + 4×A55),集成 6TOPS 综合算力 NPU,支持主流深度学习框架。凭借高能效比与丰富的接口(如多路 MIPI-CSI、HDMI 2.1),它是实现智慧农业、工业视觉等场景离线化、实时化智能计算的理想底座。
为什么农作物病害识别需要这款硬件? (选型分析)
1. 真正的“边缘”智能:告别网络依赖
农田、温室往往处于网络覆盖的边缘地带,依赖 4G/5G 上传高清图像到云端进行病害分析,不仅延迟高(无法满足无人机或喷洒车的实时控制需求),且流量成本昂贵。
- 电鱼智能方案:利用 RK3588 的本地算力,将病害识别模型完全部署在设备端(On-Device AI)。图像采集后直接在本地完成推理并输出结果,实现毫秒级响应,无需依赖外部网络。
2. 6TOPS NPU 赋能复杂模型
准确识别小麦锈病、水稻稻瘟病等早期微小病斑,需要复杂的卷积神经网络(CNN,如改进的 ResNet 或 YOLO 系列)。传统的 CPU 无法满足实时推理需求。
- 算力保障:RK3588 内置的 6TOPS 三核 NPU,经过 RKNN 工具链优化后,能够高效运行量化后的 FP16/INT8 模型,满足对高分辨率图像进行实时目标检测与分割的算力需求。
3. 工业级环境适应性
田间作业环境充斥着高温、高湿和尘土。消费级开发板难以长期稳定运行。
- 可靠性底座:电鱼智能 RK3588 核心板采用工业级设计标准,支持宽温工作(具体范围参考《电鱼智能产品手册-ARM系列》),配合相应的防护底板,能够胜任严苛的户外植保环境。
系统架构与数据流 (System Architecture)
该方案构建了一个闭环的边缘视觉感知系统:
- 图像采集层:通过 MIPI-CSI 接口接入高分辨率 RGB 相机或多光谱相机,捕捉作物叶片细节。
- 边缘计算层:电鱼智能 RK3588 接收图像数据。
- 预处理:利用 CPU/GPU 进行图像裁剪、缩放和归一化。
- AI 推理:NPU 加载 RKNN 模型,输出病害类别和位置(Bounding Box/Mask)。
- 应用决策层:
- 显示交互:通过 HDMI 在本地屏幕显示带有标注的实时画面供农户参考。
- 控制联动:通过 GPIO/CAN/串口 发送控制信号给植保无人机或自动化喷灌系统,实现精准施药。
推荐软件栈:
- OS: Ubuntu 22.04 LTS (便于开发调试) 或 Buildroot (用于最终产品固化)
- AI 工具链: RKNN-Toolkit2 + RKNPU2 驱动
- 视觉库: OpenCV (用于图像前后处理)
关键技术实现 (Implementation)
环境部署与 NPU 状态确认
在进行模型部署前,首先确保 NPU 驱动正常加载且工作在高性能模式:
Bash
# 检查 NPU 设备节点
ls -l /dev/rknpu
# 查当前 NPU 频率与占用率(需相关工具支持)
cat /sys/kernel/debug/rknpu/load推理业务逻辑示例 (Python 伪代码)
以下展示如何调用 RKNN 接口进行病害识别的逻辑框架:
Python
# 逻辑示例:调用 NPU 进行农作物病害识别
import cv2
import numpy as np
from rknnlite.api import RKNNLite
# 1. 初始化 RKNN 模型
rknn_lite = RKNNLite()
ret = rknn_lite.load_rknn('./crop_disease_yolov5s.rknn')
ret = rknn_lite.init_runtime(core_mask=RKNNLite.NPU_CORE_0_1_2) # 启用所有NPU核心
def diagnose_crop_disease(image_path):
# 2. 图像预处理 (Resize, Normalize 等,匹配模型输入要求)
img_src = cv2.imread(image_path)
img_input = preprocess_image(img_src, target_size=(640, 640))
# 3. NPU 推理执行
# inputs 为预处理后的 numpy array
outputs = rknn_lite.inference(inputs=[img_input])
# 4. 后处理 (解析模型输出,NMS,坐标还原)
# results 包含病害类别 ID、置信度、坐标框
results = postprocess_yolo_output(outputs, img_src.shape)
# 5. 结果标注与输出
draw_labels_on_image(img_src, results)
return results
# 注:preprocess_image 和 postprocess_yolo_output 需根据具体模型实现性能表现 (理论预估)
基于 RK3588 的 6TOPS 算力,针对常见的农业视觉模型进行预估:
- 模型类型:轻量化目标检测模型(如优化后的 YOLOv5s-int8 或 MobileNet-SSD)。
- 输入分辨率:640 \times 640。
- 推理速度:预计可达 30-50 FPS(帧每秒)。
- 端到端延迟:从摄像头采集到输出识别结果,延迟预计控制在 50ms 以内,满足植保机械实时控制的要求。
常见问题 (FAQ)
1. 如何将我训练好的 PyTorch/TensorFlow 模型部署到 RK3588 上?
答:需要使用瑞芯微提供的 RKNN-Toolkit2 工具(通常在 X86 PC 上运行),将原始模型(.pt, .onnx, .tflite 等)进行转换和量化(Quantization),生成 RK3588 NPU 可识别的 .rknn 格式文件。
2. RK3588 支持接入多光谱相机进行更高级的病害分析吗?
答:支持。RK3588 拥有丰富的 MIPI-CSI 和 USB 3.0 接口,可以接入多光谱或高光谱相机。关键在于需要适配相应的 Linux 驱动(V4L2),并在应用层正确获取多通道图像数据。
3. 部署在移动设备(如植保车)上,功耗是否满足要求?
答:RK3588 采用 ARM 架构,相比 X86 工控机具有显著的能效优势。在典型的 AI 推理场景下,整板功耗通常在 8W-15W 左右(视具体负载和外设而定),适合电池供电的移动农业设备。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 19
19 0
0- 0



 已为社区贡献74条内容
已为社区贡献74条内容

所有评论(0)