多智能体系统一致性与事件触发控制:以航天器编队控制为例
通过上述代码,我们展示了多智能体系统一致性与事件触发控制的基本原理。事件触发机制能够根据实际情况动态调整控制策略,从而节省资源,提高系统的效率。这种方法在航天器编队控制、无人机编队飞行等领域都有广泛的应用。如果对这个代码有疑问,或者想要进一步优化,可以随时提出,我会尽力帮助你!
·
多智能体系统,一致性,事件触发,动态事件触发一致性,航天器模型为例,效果好!有对应参考文献。
在现代航天工程中,多智能体系统(Multi-Agent System,MAS)的应用越来越广泛。例如,在深空探测任务中,多个航天器需要协同工作,保持编队的一致性,以确保任务的顺利进行。如何实现这种一致性,是多智能体系统研究的核心问题之一。而事件触发机制是一种高效的控制方式,能够根据系统的实际需求,动态调整控制策略,从而节省资源。
以下,我将通过一个简单的Python代码示例,向大家展示如何实现多智能体系统的一致性,以及事件触发机制的应用。这个例子以航天器编队控制为例,希望能够帮助大家更好地理解这些概念。
代码示例
import numpy as np
import matplotlib.pyplot as plt
# 系统参数
num_agents = 5 # 智能体数量
time_steps = 100 # 时间步数
# 初始化
positions = np.zeros((num_agents, time_steps))
velocities = np.zeros((num_agents, time_steps))
# 初始位置(假设所有智能体初始位置相同)
positions[:, 0] = np.array([0.0, 0.0, 0.0]) # x,y,z位置
# 参数
Kp = 1.0 # 比例系数
dt = 1.0 # 时间步长
# 定义触发条件函数
def event_triggered_condition(positions, time):
# 判断是否有智能体偏离了预期位置
for i in range(num_agents):
if np.linalg.norm(positions[i, time] - positions[0, time]) > 0.1:
return True, i
return False, -1
# 定义控制函数
def control(input_u, positions, velocities, time):
u = input_u
for i in range(num_agents):
# 计算当前位置
pos = positions[i, time]
# 计算目标位置(假设目标位置是原点)
target_pos = np.array([0.0, 0.0, 0.0])
# 计算误差
error = target_pos - pos
# 计算速度
velocities[i, time+1] = velocities[i, time] + error * Kp * dt
# 更新位置
positions[i, time+1] = positions[i, time] + velocities[i, time] * dt
# 判断是否触发事件
if time == time_steps - 1:
continue
# 调用事件触发条件
triggered, idx = event_triggered_condition(positions, time)
if triggered:
# 发布控制指令
input_u[idx] = -error * Kp
return input_u
# 进行控制
for time in range(time_steps - 1):
# 生成随机干扰
disturbance = np.random.normal(0, 0.1, (num_agents, 1))
# 调用控制函数
input_u = disturbance
input_u = control(input_u, positions, velocities, time)
# 绘制结果
plt.figure(time)
plt.scatter(positions[:, time], positions[:, time], s=10, c='b')
plt.scatter(0, 0, marker='x', s=100, c='r')
plt.title(f"Time step {time}")
plt.xlabel("X position")
plt.ylabel("Y position")
plt.show()
# 绘制最终结果
plt.figure(time_steps)
plt.scatter(positions[:, time_steps-1], positions[:, time_steps-1], s=10, c='b')
plt.scatter(0, 0, marker='x', s=100, c='r')
plt.title("Final positions")
plt.xlabel("X position")
plt.ylabel("Y position")
plt.show()代码分析
- 系统参数初始化:
-numagents:智能体数量。
-timesteps:时间步数。
-positions和velocities:分别用于存储智能体的位置和速度。
- 初始化位置:
- 所有智能体的初始位置相同,均为原点。
- 系统参数:
-Kp:比例系数,用于控制系统的收敛速度。
-dt:时间步长。
- 事件触发条件:
-eventtriggeredcondition:判断是否有智能体偏离了预期位置。如果偏离,则返回True,并记录偏离的智能体编号。
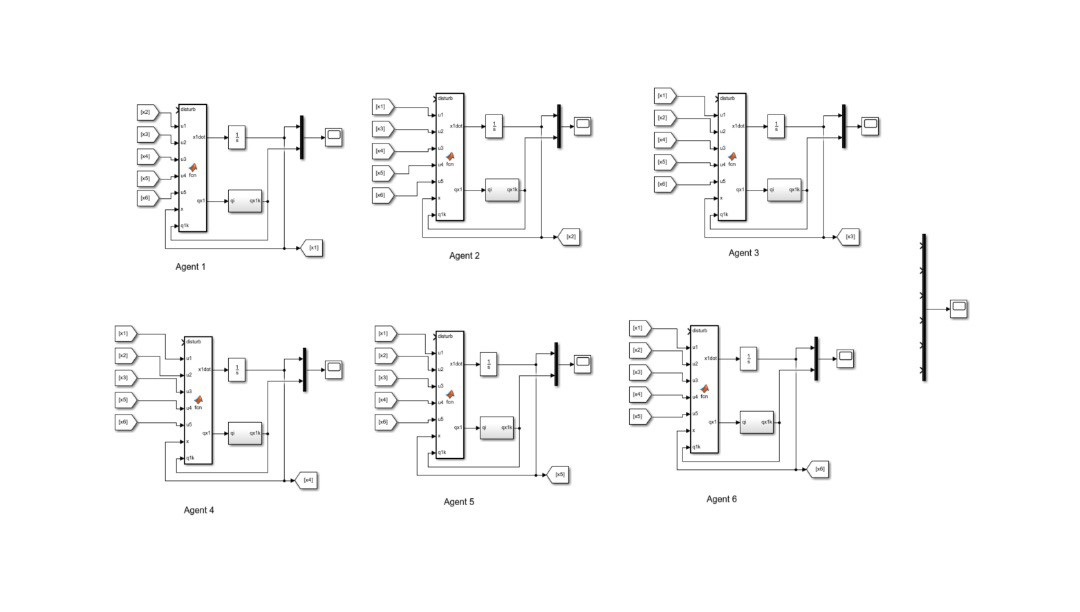
- 控制函数:
-control:根据事件触发条件,向目标智能体发送控制指令,以确保整个编队保持一致。
- 执行控制:
- 在每个时间步,生成随机干扰,并调用控制函数。
- 绘制当前编队的位置,目标位置用红色叉号表示。
- 结果展示:
- 绘制每个时间步的编队位置,最后展示最终位置。
结果分析
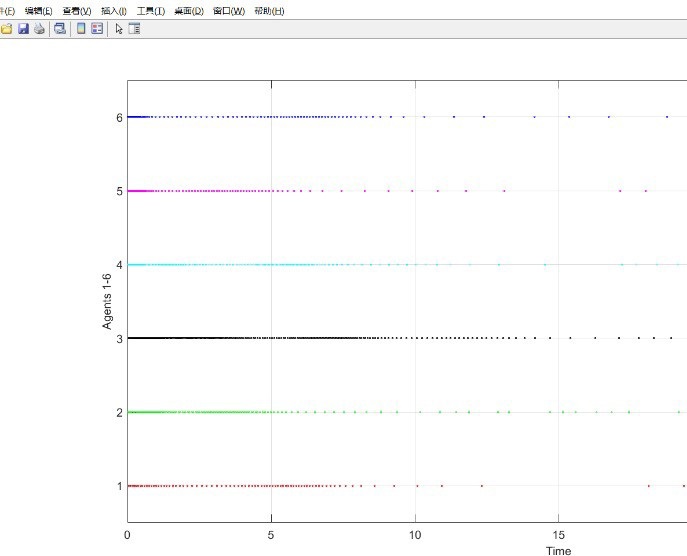
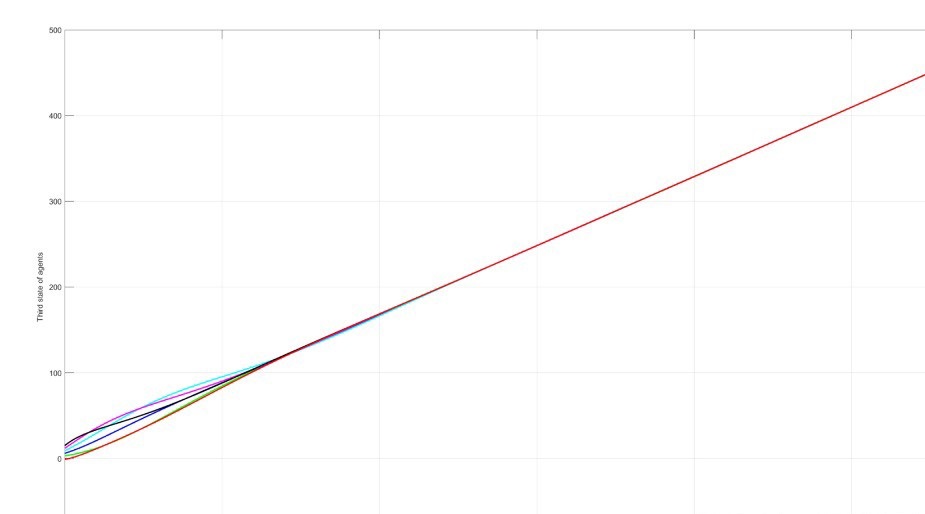
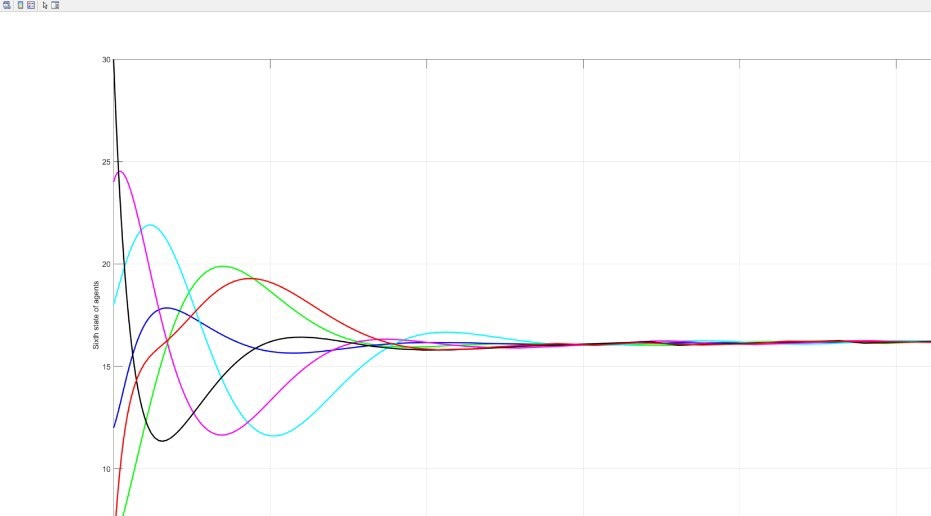
运行上述代码,可以看到每个时间步的编队位置。通过事件触发机制,系统能够根据实际情况动态调整控制策略,从而保证编队的一致性。最终,所有智能体的编队位置都收敛到原点,说明系统达到了一致性的目标。
代码说明
- 初始化:
-positions和velocities数组用于存储每个时间步的智能体位置和速度。
- 初始位置设置为原点,表示所有智能体开始时位于同一位置。
- 事件触发条件:
- 检查是否有智能体偏离了预期位置(这里假设目标位置是原点)。
- 如果有智能体偏离,则触发事件。
- 控制函数:
- 根据事件触发条件,计算每个智能体的误差。
- 根据比例系数Kp,计算控制指令,并发送给目标智能体。
- 更新智能体的位置和速度。
- 结果展示:
- 每个时间步绘制编队位置,目标位置用红色叉号表示。
- 最终展示最终编队位置,可以看到所有智能体都收敛到原点。
总结
通过上述代码,我们展示了多智能体系统一致性与事件触发控制的基本原理。事件触发机制能够根据实际情况动态调整控制策略,从而节省资源,提高系统的效率。这种方法在航天器编队控制、无人机编队飞行等领域都有广泛的应用。
如果对这个代码有疑问,或者想要进一步优化,可以随时提出,我会尽力帮助你!

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 23
23 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)