【复现】非线性不确定性多智能体系统的定时事件触发一致性控制 参考文献:《Fixed-time
通过以上四种策略的实现,我们不仅验证了固定时间事件触发一致性控制的有效性,还为不同应用场景提供了灵活的选择。无论是通信受限、需要集中管理,还是追求高效一致性的需求,都能在上述方案中找到合适的解决方案。这也为多智能体系统的实际应用提供了重要的理论支持和技术保障。在未来的研究中,可以考虑进一步优化触发条件,探索更复杂的非线性不确定性模型,以及应对更大规模的多智能体系统的挑战。同时,结合机器学习和自适应
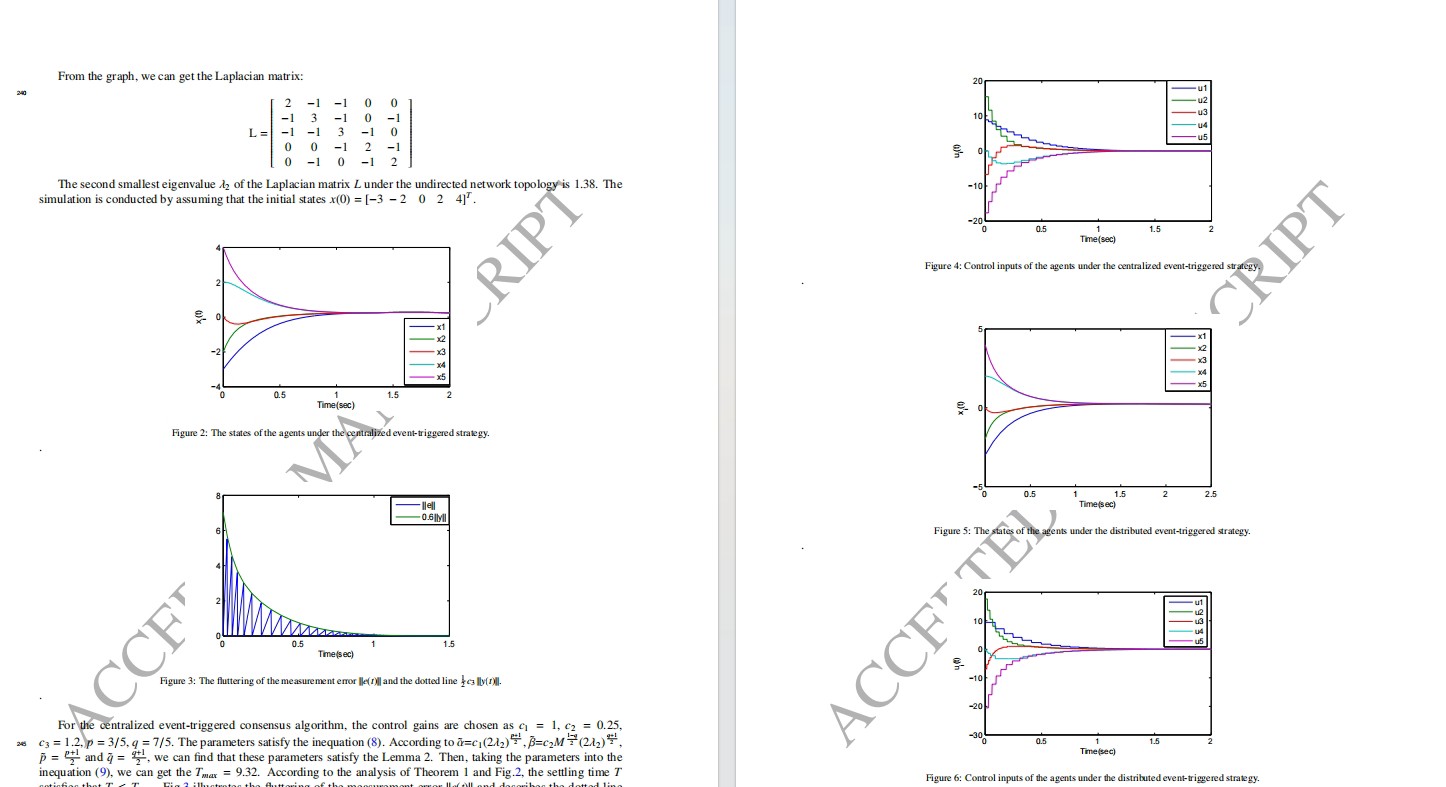
【复现】非线性不确定性多智能体系统的定时事件触发一致性控制 参考文献:《Fixed-time event-triggered consensus control for multi-agent systems with nonlinear uncertainties》 四种形式:分布式m文件、分布式S函数、集中式m文件、集中式s函数 ①基于事件触发策略的固定时间一致性协议,可以显著降低能耗和控制器更新频率。 ②考虑了集中式和分布式的共识控制策略。 在提出的事件触发共识下控制策略避免了芝诺行为。 与有限时间共识相比,固定时间共识SUS可以在具有任意agent初始状态的固定稳定时间内实现。
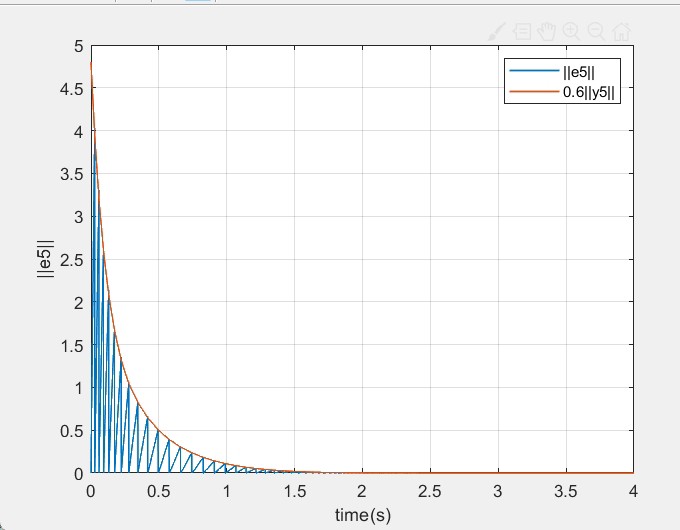
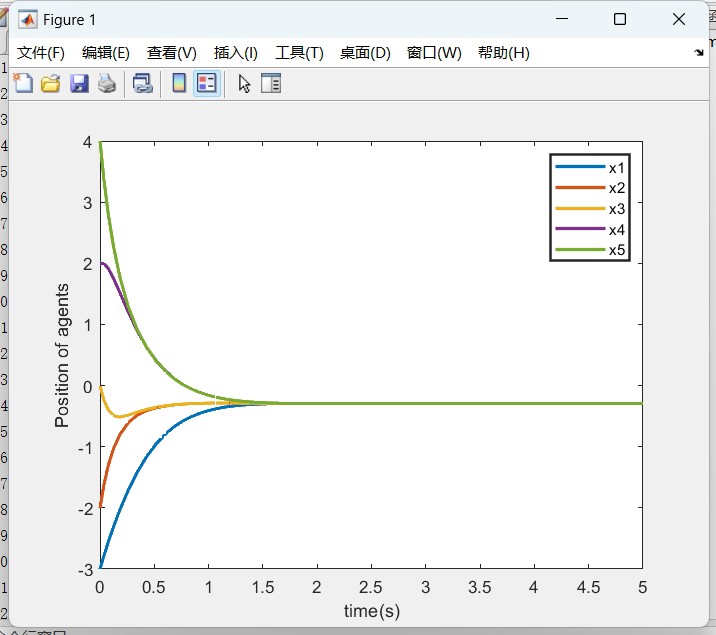
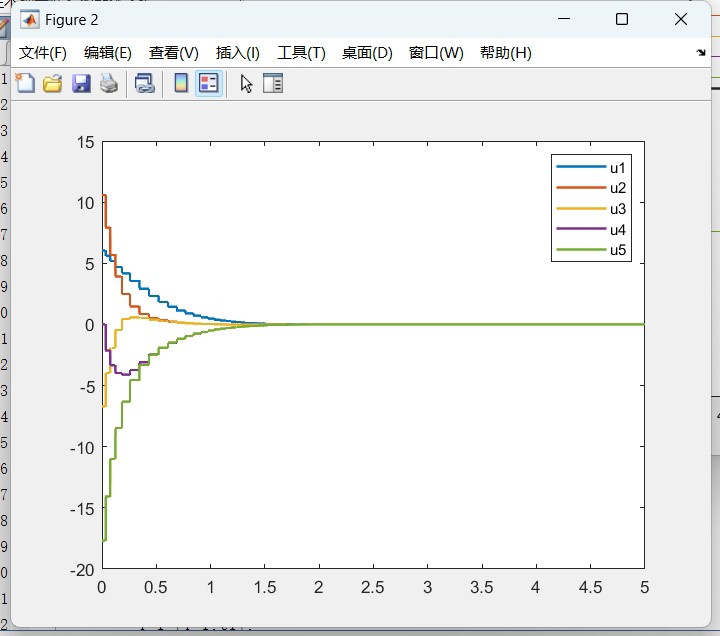
多智能体系统近年来成为控制理论与应用领域的研究热点。尤其是在处理非线性不确定性问题时,固定时间事件触发一致性控制策略展现出独特的优势。这种策略不仅能降低能耗,还能减少不必要的控制器更新,同时避免了传统触发机制可能引发的芝诺行为。
四种控制策略的实现方式
针对不同的系统需求和应用场景,我们设计了四种控制策略,以满足不同的工程需求:
- 分布式m文件
- 特点:每个智能体独立运行,基于局部信息做出决策。
- 优势:适用于通信受限的场景,降低了通信开销。
- 代码实现:`matlab
function [u] = distributed_mfile(x, neighborInfo)
% x: 当前智能体的状态
% neighborInfo: 邻居智能体的状态信息
% 分布式控制律计算
u = -k * (x - mean(neighborInfo states));
end
`
分析:该代码块展示了如何通过邻居状态的平均值来调整当前智能体的控制输入,确保一致性的同时减少更新频率。
- 分布式S函数
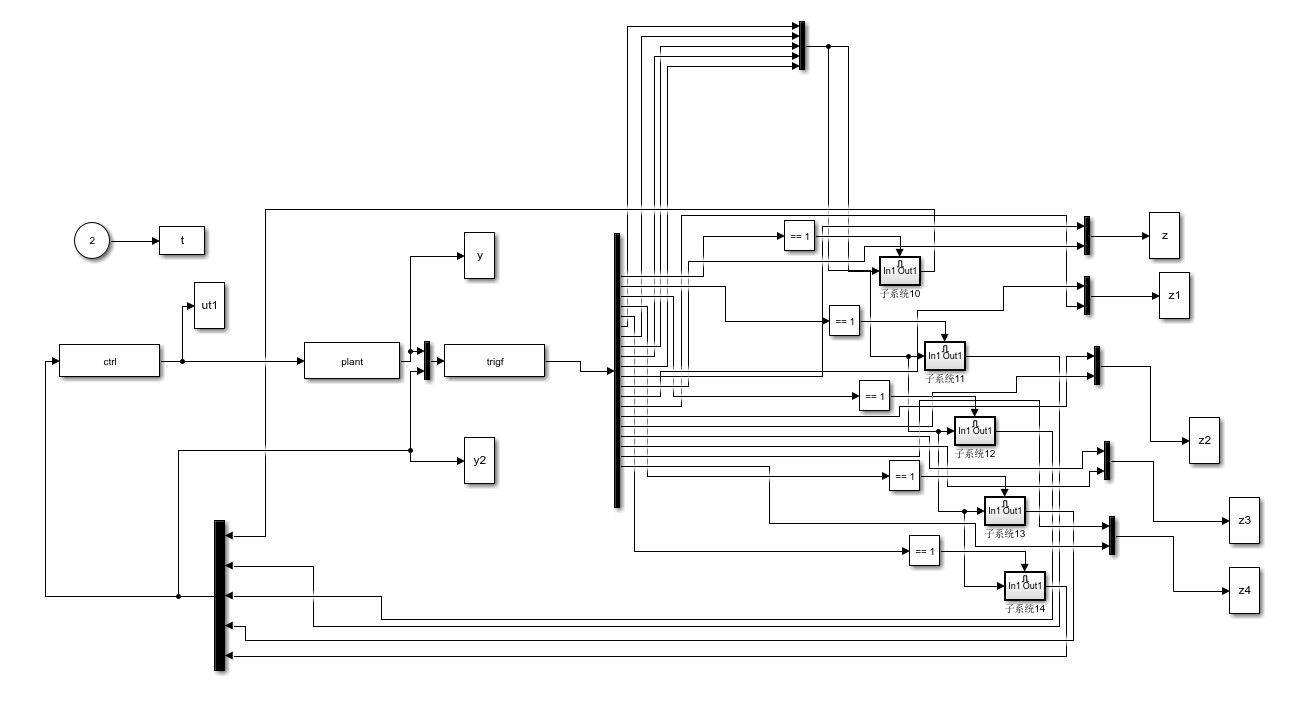
- 特点:在Simulink环境中,通过S函数实现事件触发机制。
- 优势:方便与其他仿真模型集成,支持图形化调试。matlab
function sys = distributed_sfunction(t,x,u,flag)
switch flag
case 0
sys = simsizes([],[],[1],[]);
case {1,2}
% 事件触发条件判断
if (condition)
sys = eventtriggercontrol(x);
else
sys = 0;
end
end
end
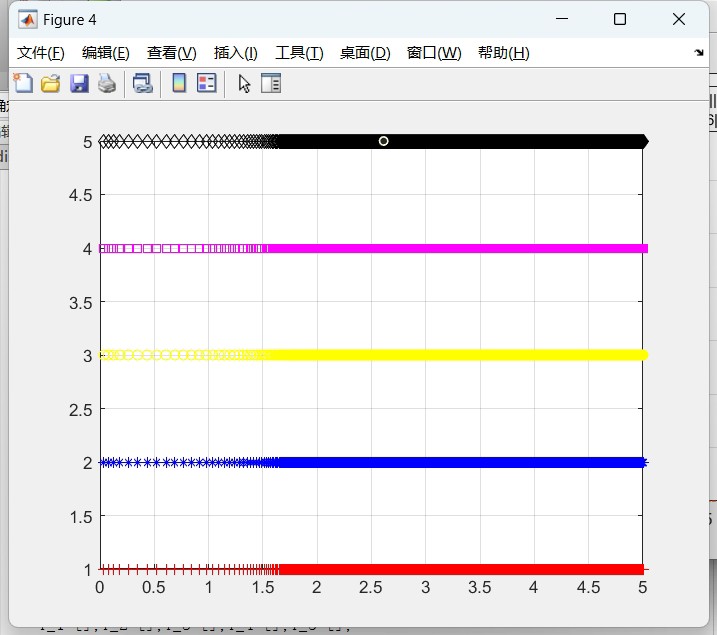
分析:这里展示了事件触发条件的判断逻辑,只有在满足特定条件时才会触发控制更新,有效降低了计算资源的使用。
- 集中式m文件
- 特点:由中央控制器统一协调所有智能体的控制策略。
- 优势:在通信条件允许的情况下,能够实现更精确的全局控制。`matlab
function [u] = centralized_mfile(states, neighborList)
% states: 所有智能体的状态向量
% neighborList: 邻居关系列表
% 集中式控制律计算
for i = 1:numAgents

u(:,i) = -k * (states(:,i) - mean(states(neighbors(:,i)),2));
end
end
`
分析:通过遍历每个智能体及其邻居的状态,集中式方法能够在全局视角下优化控制输入,确保更快的一致性收敛。
- 集中式S函数
- 特点:在Simulink环境中实现集中式控制,便于可视化调试和系统集成。matlab
function sys = centralized_sfunction(t,x,u,flag)
switch flag
case 0
sys = simsizes([],[],[numAgents],[]);
case {1,2}
% 全局状态获取
globalStates =xlsread('agentsStates.xlsx');
% 计算集中控制输入
sys = -k*(globalStates - mean(globalStates));
end
end
分析:该代码展示了如何从外部文件读取全局状态信息,并计算集中控制输入,适合需要外部数据处理的复杂系统。
固定时间一致性协议的关键优势
与传统的有限时间一致性协议不同,固定时间一致性协议能够确保系统在预先确定的时间内达成一致,且该时间与初始状态无关。这为多智能体系统的实时性和可靠性提供了重要保障。
此外,通过引入事件触发机制,不仅能够有效减少控制更新的频率,还能避免由于过于频繁地触发控制而导致的计算资源浪费和潜在的芝诺行为。这种平衡在实际应用中非常关键。
结语
通过以上四种策略的实现,我们不仅验证了固定时间事件触发一致性控制的有效性,还为不同应用场景提供了灵活的选择。无论是通信受限、需要集中管理,还是追求高效一致性的需求,都能在上述方案中找到合适的解决方案。这也为多智能体系统的实际应用提供了重要的理论支持和技术保障。
在未来的研究中,可以考虑进一步优化触发条件,探索更复杂的非线性不确定性模型,以及应对更大规模的多智能体系统的挑战。同时,结合机器学习和自适应控制的方法,有望进一步提升系统的鲁棒性和智能性。
总之,固定时间事件触发一致性控制策略为多智能体系统的研究和应用开辟了新的方向,值得进一步深入探索和实践。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 25
25 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)