自制多智能体系统:路径规划、编队一致性、避障与人工势场法全解析
自制:多智能体路径规划+编队一致性+避障+人工势场法(MATLAB 代码+公式推导)在智能体相关的研究与应用领域,实现多智能体系统的高效路径规划、编队一致性保持以及避障功能是极具挑战性但又十分关键的任务。人工势场法作为一种经典的方法,在这几个方面有着出色的表现。今天就来分享下如何基于MATLAB实现融合这些功能的多智能体系统。
自制:多智能体路径规划+编队一致性+避障+人工势场法(MATLAB 代码+公式推导)
在智能体相关的研究与应用领域,实现多智能体系统的高效路径规划、编队一致性保持以及避障功能是极具挑战性但又十分关键的任务。人工势场法作为一种经典的方法,在这几个方面有着出色的表现。今天就来分享下如何基于MATLAB实现融合这些功能的多智能体系统。
一、人工势场法基本原理与公式推导
人工势场法将多智能体所处的空间想象成充满各种势能的场。目标点对智能体产生吸引力,障碍物对智能体产生排斥力,智能体就像在这个虚拟势场中受合力作用移动的粒子。
吸引力公式
设目标点为$G$,智能体位置为$q$,吸引力$F_{att}$可表示为:
\[ F{att}(q) = k{att} \cdot (q - G) \]
其中$k_{att}$是吸引力系数,它决定了目标点对智能体吸引作用的强度。
排斥力公式
对于障碍物$O$,设障碍物到智能体的距离为$d$,排斥力$F_{rep}$可表示为:
\[ F_{rep}(q) =
\begin{cases}
k{rep} \cdot (\frac{1}{d} - \frac{1}{d0}) \cdot \frac{1}{d^2} \cdot \hat{n} & \text{if } d < d_0 \\
0 & \text{if } d \geq d_0
\end{cases}
\]
这里$k{rep}$是排斥力系数,$d0$是一个预设的影响距离,$\hat{n}$是从障碍物指向智能体的单位向量。当智能体距离障碍物大于$d_0$时,障碍物对其排斥力为0。
总的作用力$F_{total}$就是吸引力与排斥力的矢量和:
\[ F{total}(q) = F{att}(q) + F_{rep}(q) \]
二、MATLAB代码实现
初始化部分
% 多智能体数量
num_agents = 5;
% 目标点位置
goal = [10, 10];
% 障碍物位置
obstacles = [5, 5; 8, 3];
% 吸引力系数
k_att = 1;
% 排斥力系数
k_rep = 10;
% 障碍物影响距离
d_0 = 2;
% 初始化智能体位置
agents_pos = rand(num_agents, 2); 在这部分代码中,我们定义了多智能体系统的基本参数,包括智能体数量、目标点位置、障碍物位置以及人工势场法中的关键系数。同时随机初始化了智能体的位置。
计算力的部分
for i = 1:num_agents
% 计算吸引力
F_att = k_att * (goal - agents_pos(i, :));
F_rep = [0, 0];
for j = 1:size(obstacles, 1)
dist = norm(agents_pos(i, :) - obstacles(j, :));
if dist < d_0
n_hat = (agents_pos(i, :) - obstacles(j, :)) / dist;
F_rep = F_rep + k_rep * (1/dist - 1/d_0) * (1/dist^2) * n_hat;
end
end
F_total = F_att + F_rep;
% 更新智能体位置
agents_pos(i, :) = agents_pos(i, :) + 0.1 * F_total;
end这部分代码循环遍历每个智能体,分别计算其受到的吸引力、排斥力,然后得到总的作用力,基于此更新智能体的位置。这里的步长设置为0.1,可以根据实际情况调整。
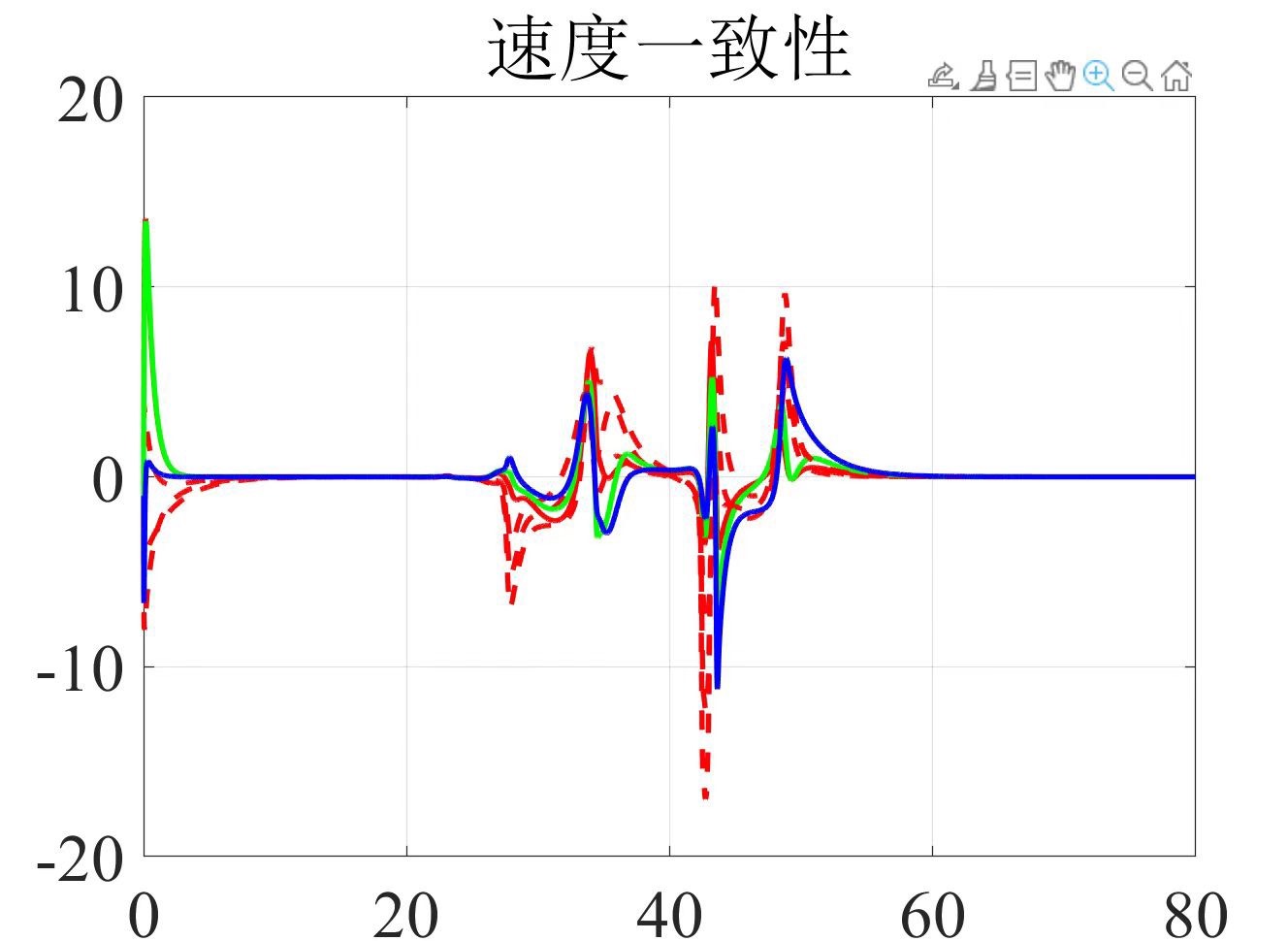
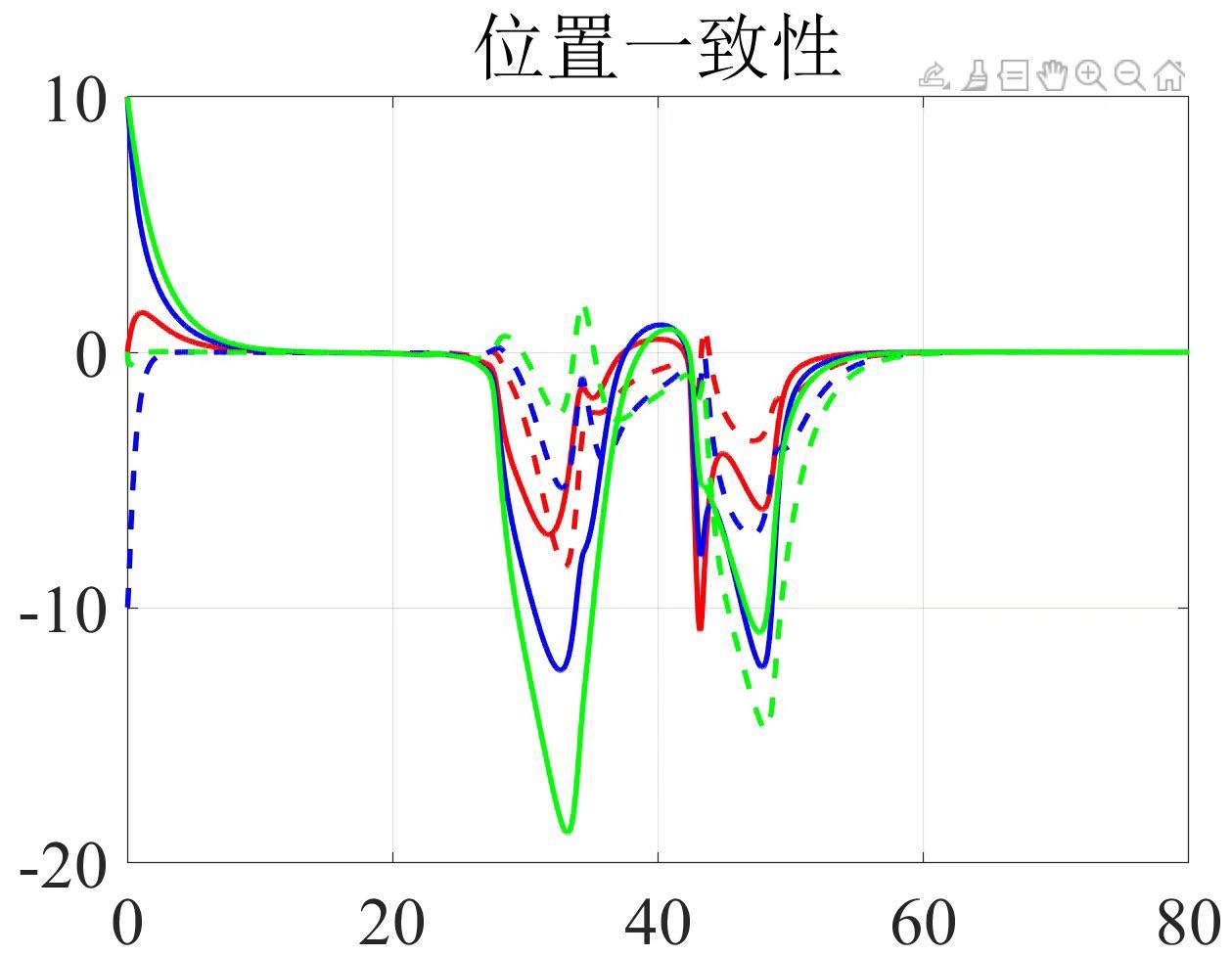
编队一致性部分
编队一致性旨在让多个智能体按照特定的队形移动。为实现这一点,我们可以在每个智能体的受力计算中加入与其他智能体的相对位置关系。
% 编队一致性系数
k_coh = 0.5;
for i = 1:num_agents
F_coh = [0, 0];
for j = 1:num_agents
if i ~= j
F_coh = F_coh + k_coh * (agents_pos(j, :) - agents_pos(i, :));
end
end
% 加入编队一致性力到总力中
F_total = F_total + F_coh;
% 更新智能体位置
agents_pos(i, :) = agents_pos(i, :) + 0.1 * F_total;
end在这里,我们定义了一个编队一致性系数$k_{coh}$,通过计算每个智能体与其他智能体的相对位置差,并乘以系数得到编队一致性力,加入到总力中更新智能体位置,从而趋向于保持特定编队。
路径规划与避障的可视化
figure;
hold on;
% 绘制目标点
plot(goal(1), goal(2), 'go', 'MarkerSize', 10, 'LineWidth', 2);
% 绘制障碍物
for j = 1:size(obstacles, 1)
plot(obstacles(j, 1), obstacles(j, 2), 'ro', 'MarkerSize', 10, 'LineWidth', 2);
end
% 绘制智能体
agent_handles = plot(agents_pos(:, 1), agents_pos(:, 2), 'bo', 'MarkerSize', 8, 'LineWidth', 2);
for t = 1:100
% 执行上述计算力和更新位置的代码块
% 更新智能体位置显示
for i = 1:num_agents
set(agent_handles(i), 'XData', agents_pos(i, 1), 'YData', agents_pos(i, 2));
end
drawnow;
pause(0.1);
end
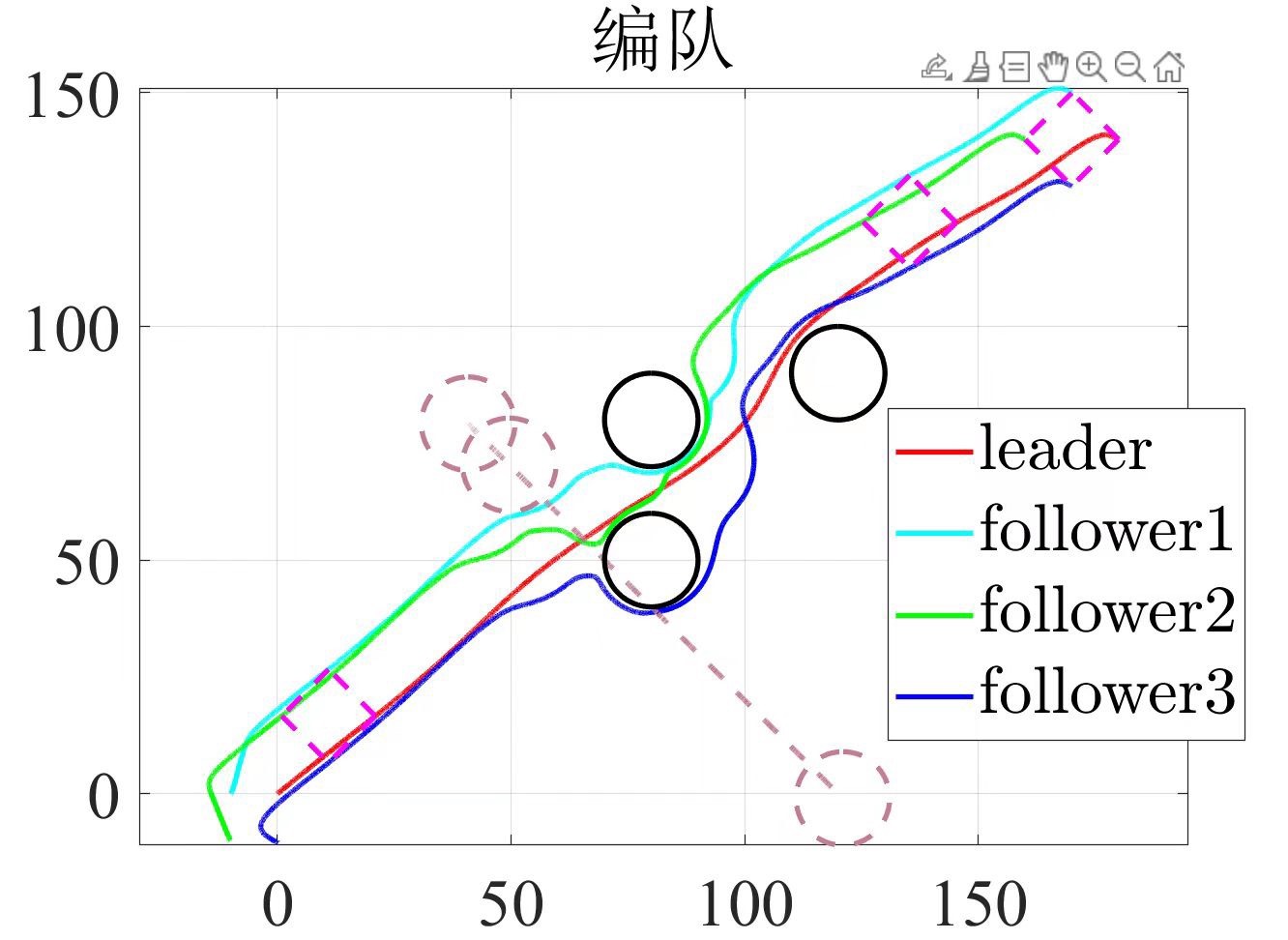
hold off;最后这部分代码实现了系统的可视化,我们绘制了目标点、障碍物和智能体,并在每次更新智能体位置后实时显示,通过pause函数控制动画的速度,这样就能直观地看到多智能体如何在目标引导、避障以及编队一致性要求下移动。
通过以上的公式推导和MATLAB代码实现,我们成功构建了一个集多智能体路径规划、编队一致性以及避障功能于一体的系统,利用人工势场法为智能体在复杂环境中的行动提供了有效的解决方案。希望这篇博文能为大家在多智能体相关研究与开发中带来一些启发。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 7
7 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)