VoxelMorph库的关键功能介绍
特性说明无监督无需昂贵的形变标注速度快GPU 上 3D 配准 < 1 秒(传统方法需分钟级)端到端可微支持联合优化拓扑保持微分同胚选项确保解剖合理性开箱即用提供预训练模型、示例脚本、Jupyter Notebook活跃社区GitHub 超 3k stars,持续更新📚 论文:如果你从事医学图像分析、计算解剖学或 AI for Healthcare,VoxelMorph 几乎是非刚性配准的首选工具
第一部分:库功能介绍
VoxelMorph 是一个专为 医学图像配准(Medical Image Registration)设计的开源深度学习库,由 MIT 和哈佛等机构开发,以 无监督、快速、端到端 的配准能力著称。除了你已了解的 Unet、SpatialTransformer 和位移场预测外,它还包含一系列关键功能和模块,支撑从 2D/3D 刚性到非刚性、仿射到微分同胚(diffeomorphic)等多种配准任务。
以下是 VoxelMorph 库的核心功能分类详解:
🔹 一、核心网络架构
1. vxm.networks.VxmDense
- 最常用的完整配准模型,封装了 U-Net + SpatialTransformer。
- 自动处理输入拼接、位移场生成、图像形变全过程。
- 支持 2D/3D,可选是否启用微分同胚积分(
int_steps)。
model = vxm.networks.VxmDense(
inshape=(160, 192, 224),
nb_unet_features=[[16,32,32,32], [32,32,32,32,32,16]],
int_steps=7, # 启用微分同胚(smooth, invertible)
int_downsize=2 # 积分在低分辨率进行以加速
)
2. vxm.networks.Unet
- 如前所述,用于提取特征并回归形变场的基础编码器-解码器。
3. vxm.networks.Transform
- 仅包含
SpatialTransformer的轻量模型,用于已有位移场的形变应用。
🔹 二、形变场后处理与高级变换
1. 微分同胚配准(Diffeomorphic Registration)
- 通过 Scaling and Squaring 方法将初始速度场积分成平滑、可逆的形变。
- 保证拓扑保持(无折叠、撕裂),对医学分析至关重要。
- 由
vxm.layers.VecInt(向量场积分层)实现:flow = unet(input) # 初始速度场 diff_flow = vxm.layers.VecInt(int_steps=7)(flow) # 微分同胚形变场
2. 多尺度配准(Multi-resolution)
- 支持在不同分辨率下级联配准(coarse-to-fine),提升大形变鲁棒性。
- 可通过构建多级
VxmDense模型实现。
🔹 三、损失函数(Loss Functions)
VoxelMorph 提供多种无监督损失函数,无需 ground truth 形变场:
| 损失类型 | 类名 | 作用 |
|---|---|---|
| 相似性损失 | vxm.losses.NCC |
归一化互相关,衡量两图结构相似性(对 MRI 强度不敏感) |
vxm.losses.MSE |
均方误差(适用于强度一致的图像) | |
vxm.losses.Dice |
用于分割图配准 | |
| 正则化损失 | vxm.losses.Grad('l2') |
惩罚位移场梯度,鼓励平滑形变 |
vxm.losses.BendingEnergy |
更强的平滑约束(二阶梯度) |
✅ 典型损失组合:
loss = NCC(warped, fixed) + λ * Grad(flow)
🔹 四、实用工具与辅助模块
1. 图像预处理/后处理
vxm.utils提供:read_file,save_file:读写 NIfTI 等医学图像格式volshow:3D 体绘制可视化transform:应用已有形变场到新图像
2. 形变场操作
vxm.utils.jacobian_determinant(flow):计算雅可比行列式,评估形变局部体积变化(判断是否折叠)vxm.utils.compose:组合多个形变场
3. 数据增强
- 支持随机仿射变换、噪声注入等,用于训练鲁棒性提升。
🔹 五、支持的任务类型
| 配准类型 | 是否支持 | 说明 |
|---|---|---|
| 2D / 3D | ✅ | 自动适配输入维度 |
| 单模态 / 多模态 | ✅ | 通过 NCC 或 MI(互信息)损失支持 |
| 无监督 | ✅ | 默认模式,无需标注 |
| 弱监督 | ✅ | 可结合少量 landmark 或 segmentation 监督 |
| 对称配准 | ✅ | 同时 warp A→B 和 B→A,提升一致性 |
| 群体模板构建(Template Construction) | ✅ | 迭代优化平均模板 + 形变场 |
🔹 六、部署与集成
- TensorFlow/Keras 原生:模型可直接
.save()为 SavedModel 或 HDF5。 - ONNX 支持(社区扩展):便于部署到生产环境。
- 与 ITK、SimpleITK 互操作:可通过
vxm.utils转换数据格式。
🔹 七、典型应用场景
- 跨时间点脑 MRI 对齐(如阿尔茨海默病研究)
- 多模态融合(T1 + T2 MRI,MRI + PET)
- 术中图像与术前计划配准
- 构建人群平均脑模板(如 MNI space)
- 动态器官跟踪(心脏、肺部呼吸运动建模)
✅ 总结:VoxelMorph 的核心优势
| 特性 | 说明 |
|---|---|
| 无监督 | 无需昂贵的形变标注 |
| 速度快 | GPU 上 3D 配准 < 1 秒(传统方法需分钟级) |
| 端到端可微 | 支持联合优化 |
| 拓扑保持 | 微分同胚选项确保解剖合理性 |
| 开箱即用 | 提供预训练模型、示例脚本、Jupyter Notebook |
| 活跃社区 | GitHub 超 3k stars,持续更新 |
🌐 官方 GitHub:https://github.com/voxelmorph/voxelmorph
📚 论文:VoxelMorph: A Learning Framework for Deformable Medical Image Registration (IEEE TMI 2019)
如果你从事医学图像分析、计算解剖学或 AI for Healthcare,VoxelMorph 几乎是非刚性配准的首选工具库。
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
第二部分:warped = spatial_transformer([moving, flow])函数功能和作用
warped = spatial_transformer([moving, flow]) 这行代码的功能是根据给定的位移场(displacement field)对源图像进行空间变换(warping),生成形变后的图像。具体来说,它实现了以下步骤:
1. 输入参数
moving: 这是一个张量,表示需要被形变的源图像(moving image)。其形状通常是(batch_size, height, width, channels)或者在3D情况下为(batch_size, depth, height, width, channels)。flow: 这是另一个张量,表示位移场(displacement field),用于指示每个像素点需要移动的方向和距离。其形状与图像的空间维度相匹配,但通道数等于空间维度的数量(2D图像为2,3D图像为3),即(batch_size, height, width, 2)对于2D情况。
2. SpatialTransformer 层的作用
spatial_transformer 是一个基于 Keras 的自定义层,通常由 VoxelMorph 库提供。它的主要职责是:
- 接收两个输入:一个是待变形的图像(
moving),另一个是指定位移信息的位移场(flow)。 - 执行可微分的空间变换:利用位移场中的信息来计算每个像素的新位置,并使用插值方法(如双线性插值)从原图中获取相应的像素值,从而生成新的、经过形变的图像。
3. 输出结果
warped: 这个变量存储了经过形变后的图像。它的形状与原始的moving图像相同,但是内容已经被按照flow中指定的方式重新排列了。
4. 应用场景
在医学图像配准任务中,这个过程通常用来将一张图像(称为“moving”或“浮动”图像)对齐到另一张参考图像(称为“fixed”或“目标”图像)。通过训练神经网络预测出合适的位移场,然后应用这个位移场来调整 moving 图像的位置,使得两张图像尽可能相似。这一步骤对于后续的任务非常重要,比如病变区域的对比分析等。
示例代码片段
# 假设我们已经有了 moving_image 和 displacement_field
moving_image = ... # shape: (batch, height, width, channels)
displacement_field = ... # shape: (batch, height, width, 2)
# 创建 SpatialTransformer 层实例
spatial_transformer = vxm.layers.SpatialTransformer(name='transformer')
# 应用空间变换
warped_image = spatial_transformer([moving_image, displacement_field])
# 此时 warped_image 包含了经过形变后的图像数据
总之,warped = spatial_transformer([moving, flow]) 实现了一个关键步骤,即将一个位移场应用于特定的源图像上,以产生一个新的图像,该图像已经根据位移场进行了适当的空间变换。这是实现图像配准的核心操作之一。
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
第三部分:为什么spatial_transformer 可微
SpatialTransformer(特别是 VoxelMorph 中的实现)之所以保持可微分(differentiable),根本原因在于:
它所依赖的核心操作——插值(如双线性/三线性插值)——是关于输入坐标和源图像值的光滑、连续、可导函数。
下面从数学原理、计算图构建和深度学习框架支持三个层面详细解释。
🔹 一、核心思想:形变 = 坐标变换 + 插值采样
SpatialTransformer 的任务是:
给定一个位移场 ( u(x) ),将源图像 ( M ) 在每个目标位置 ( x ) 处的值定义为:
[ W(x) = M(x + u(x)) ]
但问题在于:
- ( x + u(x) ) 通常是非整数坐标(如 (10.37, 25.82))
- 图像 ( M ) 只在整数格点上有定义
✅ 解决方案:用插值从邻近像素估计非格点处的值。
而插值公式本身是可导的 → 整个 W(x) 对 M 和 u(x) 都可导。
🔹 二、以 2D 双线性插值为例:显式写出可导公式
设目标采样点为:
令:
则双线性插值结果为:
✅ 为什么可导?
-
对源图像 ( M ) 可导:( W ) 是
的线性组合 → 梯度直接是权重:
-
对位移场 ( u )(即对 (
))可导:
权重 () 等是 (
而
,在非整数点处 (
)(几乎处处成立)。
📌 关键:虽然
floor函数在整数点不可导,但这些点测度为零,在随机梯度下降中几乎不会遇到,实践中视为“处处可导”。
🔹 三、TensorFlow / PyTorch 如何实现自动微分?
SpatialTransformer 在底层通常通过以下方式实现(以 TensorFlow 为例):
# 伪代码示意
def call(self, inputs):
source, flow = inputs
# 1. 构建目标网格 (i, j)
grid = meshgrid_like(source)
# 2. 计算采样坐标: sample_pos = grid + flow
sample_pos = grid + flow
# 3. 使用 tf.image.resize 或自定义 CUDA kernel 进行双线性采样
warped = bilinear_sampler(source, sample_pos)
return warped
其中 bilinear_sampler 是一个由基本可导操作构成的函数:
- 加法(
grid + flow) - 乘法、减法(计算权重)
- 张量索引与加权求和
✅ TensorFlow 的 Autodiff(自动微分)引擎会自动追踪这些操作,构建完整的计算图,并在反向传播时正确计算:
🔹 四、对比:为什么传统图像重采样不可微?
| 方法 | 是否可微 | 原因 |
|---|---|---|
| 最近邻插值(Nearest Neighbor) | ❌ 否 | 使用 argmin 或 round,梯度为 0 或未定义 |
OpenCV remap |
❌ 否 | C++ 实现,无梯度注册到 TF/PyTorch |
| 双线性插值(TF/PyTorch 实现) | ✅ 是 | 由基本可导运算组成,支持 Autodiff |
✅
SpatialTransformer的核心价值:用可微操作替代了传统不可微的图像 warping。
🔹 五、可视化理解:梯度如何流动?
假设损失函数为: [ \mathcal{L} = | W - F |_2^2 ] 其中 ( F ) 是固定图像。
反向传播路径:
Loss L
↑ (∂L/∂W)
Warped Image W = ST(moving, flow)
↑ (∂W/∂flow, ∂W/∂moving)
flow ← U-Net ← input
moving ← input
- 梯度 ( \frac{\partial \mathcal{L}}{\partial \text{flow}} ) 会告诉 U-Net:“你的位移场哪里预测错了”
- 梯度 ( \frac{\partial \mathcal{L}}{\partial \text{moving}} ) 在训练生成模型时也有用(如 CycleMorph)
✅ 总结:为什么 SpatialTransformer 可微?
| 原因 | 说明 |
|---|---|
| 1. 数学基础 | 双线性/三线性插值是光滑的解析函数,几乎处处可导 |
| 2. 操作原子性 | 实现仅使用加、乘、索引、求和等可导基本操作 |
| 3. 框架支持 | TensorFlow/PyTorch 的 Autodiff 能自动处理这些操作 |
| 4. 工程实现 | VoxelMorph 的 SpatialTransformer 显式构建在可微 ops 之上 |
💡 正是这种可微分性,使得 VoxelMorph 能在完全无监督(无需真实形变标签)的情况下,仅通过
warped ≈ fixed的相似性损失,端到端地训练出高质量的配准模型。
这不仅是工程技巧,更是将几何变换融入深度学习范式的理论突破。
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
第四部分:解释公式W(x)=M(x+u(x)),为何插值公式本身可导
我们来深入解释公式:[ W(x) = M(x + u(x)) ]
以及为什么 插值公式本身是可导的,从而使得 ( W(x) ) 对源图像 ( M ) 和位移场 ( u(x) ) 都可导。这是理解可微分图像配准(如 VoxelMorph)的核心。
🔹 一、公式含义:( W(x) = M(x + u(x)) )
📌 符号说明:
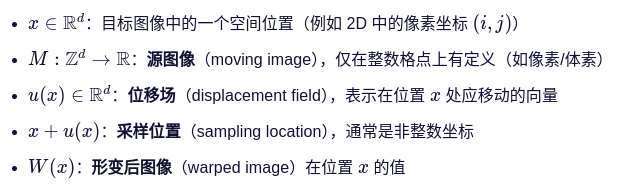
🎯 直观理解:
“要把目标图像在 ( x ) 处的像素值设为:源图像在 ( x + u(x) ) 处的值。”
这相当于反向映射(inverse warping):
- 不是“把源图像的点推到新位置”,
- 而是“在目标位置 ( x ),回溯到源图像中找应该取哪个值”。
✅ 这种方式避免了空洞(holes)问题,是标准做法。
🔹 二、核心挑战:( M ) 只在整数格点有定义!
问题在于:
- ( x ) 是整数(如 ( x = (10, 20) ))
- 但 ( x + u(x) ) 通常是非整数(如 ( (10.37, 19.82) ))
- 而 ( M ) 只在整数坐标(如 ( (10,19), (11,20) ) 等)有值
→ 不能直接计算 ( M(x + u(x)) )!
✅ 解决方案:插值(Interpolation)
用邻近的已知像素值,估计非格点处的函数值。
最常用的是:
- 2D:双线性插值(bilinear interpolation)
- 3D:三线性插值(trilinear interpolation)
🔹 三、插值公式为何可导?以 2D 双线性为例
设采样点为:
令:
则双线性插值给出: (1)
✅ 为什么这个公式是可导的?
1. 对 ( M ) 可导(即对源图像像素值)
- 公式 (1) 是
的线性组合
- 所以偏导数就是对应的权重:
其他类似。
- 结论:( W ) 对 ( M ) 是线性且可导的。
2. 对 ( u(x) ) 可导(即对位移场)
- 注意:
- 在
时(几乎总是成立),有:
- 而权重如
是 α,β 的多项式函数 → 光滑可导
- 因此,通过链式法则:
而
可从公式 (1) 直接求出(见下文)。
📐 计算示例:
这是一个确定的、连续的表达式,只要 M 有定义就存在。
⚠️ 唯一不可导的点是当 ( x_s ) 或 ( y_s ) 恰好为整数(此时
floor函数不连续)。
但在连续分布下,这种点的概率为 0,在随机梯度下降中可忽略,实践中视为“处处可导”。
🔹 四、推广到一般情况
- 3D 三线性插值:类似,只是有 8 个邻点,权重是 (
) 等形式 → 仍是多项式 → 可导。
- 高阶插值(如 bicubic):虽然更复杂,但只要使用光滑基函数(如 cubic spline),依然可导。
- 深度学习框架(TF/PyTorch):将插值实现为一系列基本可导操作(加、乘、索引、sum),Autodiff 自动处理梯度。
🔹 五、为什么“整个 ( W(x) ) 对 ( M ) 和 ( u(x) ) 都可导”很重要?
因为这使得我们可以构建端到端可训练的配准模型:
# 伪代码
flow = unet(fixed, moving) # flow = u(x),可训练
warped = spatial_transformer([moving, flow]) # W(x) = M(x + u(x))
loss = similarity_loss(warped, fixed) # 比如 NCC 或 MSE
反向传播时:
- 梯度
→ 更新 U-Net
- 梯度
→ (如果需要)更新输入或生成器
✅ 没有可微分的 ( W(x) ),就无法训练!
✅ 总结
| 关键点 | 说明 |
|---|---|
| 公式 ( W(x) = M(x + u(x)) ) | 定义了形变图像:在 ( x ) 处取源图像在 ( x + u(x) ) 处的值 |
| 插值的必要性 | 因为 ( x + u(x) ) 非整数,需用邻近像素估计 |
| 插值可导的原因 | 权重是坐标的多项式函数,输出是像素值的线性组合 → 整体光滑可导 |
| 对 ( M ) 可导 | 因为是线性加权和 |
| 对 ( u(x) ) 可导 | 因为权重关于位移连续可微(几乎处处成立) |
| 工程意义 | 使无监督图像配准成为可能,支持端到端训练 |
💡 正是这种数学上的光滑性 + 框架的自动微分支持,让
SpatialTransformer成为现代可微分图像配准的基石。
---------------------------------------------------------------------------------------------------------------------------------
第五部分:何为反向映射(inverse warping),与源图像的点推到新位置的方式的差别
这是一个非常深刻且关键的问题!“反向映射”(inverse warping) 与 “前向映射”(forward warping) 在图像形变中看似等价,但在数值实现、结果质量和可微分性上存在根本差异。下面我们从原理、问题和实践三个层面详细解释。
🔹 一、两种映射方式的定义
✅ 1. 前向映射(Forward Warping)
- 思想:把源图像中的每个像素 “推”到目标位置。
- 公式:
- 即:源点 (x) 移动到 (y),目标图像在 (y) 处的值设为 (M(x))。
✅ 2. 反向映射(Inverse Warping)← VoxelMorph 使用的方式
-
思想:对目标图像中的每个位置,回溯到源图像中找应该取哪个值。
-
公式:
其中 (v(y)) 是从目标到源的位移(通常令 (v(y) = -u(x)),在小形变下近似)。
更常见的是直接写成: [ W(x) = M(x + u(x)) ] 这里的 (x) 是目标网格上的整数坐标,(x + u(x)) 是源图像中的采样位置。
📌 注意:虽然符号略有不同,但核心是——遍历目标网格,从源图像采样。
🔹 二、为什么前向映射(“推像素”)在数值上不等价?三大致命问题
❌ 问题 1:空洞(Holes / Gaps)
- 源图像的像素被“推”到目标位置后,某些目标位置可能没有被任何源像素覆盖。
- 尤其当形变非均匀时(如局部压缩/拉伸),会出现大片未定义区域。
✅ 反向映射天然避免此问题:每个目标像素都强制赋值(通过插值)。
❌ 问题 2:重叠(Overwrites / Collisions)
- 多个源像素可能被“推”到同一个目标位置。
- 那么该位置该取谁的值?取平均?最大值?这会引入人为伪影,且不可微。
✅ 反向映射无此问题:每个目标位置独立采样,互不影响。
❌ 问题 3:不可微分 & 非结构化输出
- 前向映射的结果是一个稀疏、非规则的点集,难以表示为标准张量。
- 要填满空洞还需额外后处理(如泊松重建),而这些操作往往不可导。
- 无法直接接入深度学习训练流程。
✅ 反向映射输出是规则网格上的稠密张量,天然兼容 CNN 和自动微分。
🔹 三、直观示例(2D 图像)
假设有一个 3×3 的源图像:
M = [[A, B, C],
[D, E, F],
[G, H, I]]
➤ 前向映射(错误方式):
- 把 E 推到 (1.7, 1.8),把 F 推到 (1.7, 1.8) → 冲突!
- 把 A 推到 (0.2, 0.3),但 (0,0), (0,1), (1,0) 等位置没人覆盖 → 空洞!
最终目标图像可能是:
W = [[?, ?, ?],
[?, X, ?], ← 只有少数位置有值
[?, ?, ?]]
➤ 反向映射(正确方式):
- 对目标位置 (0,0):采样源图像 (0 + u₀₀) ≈ (0.1, 0.2) → 插值得到值
- 对 (0,1):采样 (0.9, 1.1) → 插值得到值
- ……每个位置都有定义!
结果:
W = [[w00, w01, w02],
[w10, w11, w12],
[w20, w21, w22]] ← 完整、稠密、平滑
🔹 四、数学视角:函数 vs 映射
- 图像本质是一个函数:(
)
- 形变的目标是定义一个新函数 ( W ),使得 (
),其中 (
) 是空间变换。
- 反向映射直接构造了这个函数在规则网格上的采样。
- 前向映射只是给出了函数的一些离散样本点,无法完整定义 (W)。
📌 在连续域中两者等价,但在离散数值实现中,反向映射是唯一稳定、完整、可微的方式。
🔹 五、计算机视觉中的通用实践
- 所有现代可微分渲染/形变库都使用反向映射:
- VoxelMorph (
SpatialTransformer) - PyTorch:
torch.nn.functional.grid_sample - TensorFlow:
tf.contrib.resampler或自定义 bilinear sampler - OpenCV 的
remap函数也要求提供目标到源的映射(即反向)
- VoxelMorph (
✅ 这不是偶然,而是经过几十年实践验证的最佳方案。
✅ 总结:为什么必须用反向映射?
| 特性 | 前向映射(推像素) | 反向映射(采样) |
|---|---|---|
| 空洞 | ❌ 严重 | ✅ 无 |
| 重叠 | ❌ 冲突 | ✅ 无 |
| 输出结构 | 稀疏、不规则 | 稠密、规则张量 |
| 可微分性 | ❌ 难以实现 | ✅ 天然支持 |
| 插值支持 | ❌ 不适用 | ✅ 双线性/三线性 |
| 深度学习友好 | ❌ 否 | ✅ 是 |
💡 结论:
虽然在理想连续世界中“推”和“拉”是等价的,但在离散数字图像的世界里,只有反向映射(inverse warping)能产生完整、平滑、可微、无伪影的形变结果。
这就是为什么SpatialTransformer和所有现代配准/光流方法都采用这种方式。
所以,数值上并不一样——反向映射是唯一可行的工程方案。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐



 27
27 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)