从SRS项目看现代C++最佳实践:高性能实时流媒体服务器的设计智慧
SRS(Simple Realtime Server)作为一款高性能实时流媒体服务器,展现了现代C++在工程实践中的巧妙平衡。项目采用C++11标准确保兼容性和稳定性,同时自定义智能指针和模板实现来优化性能。其代码架构贯彻RAII模式,通过分层错误处理系统和资源管理器确保可靠性。SRS创新性地使用State Threads协程库处理高并发网络IO,体现了在性能与可维护性之间的成熟取舍。这些设计决策
从SRS项目看现代C++最佳实践:高性能实时流媒体服务器的设计智慧
前言
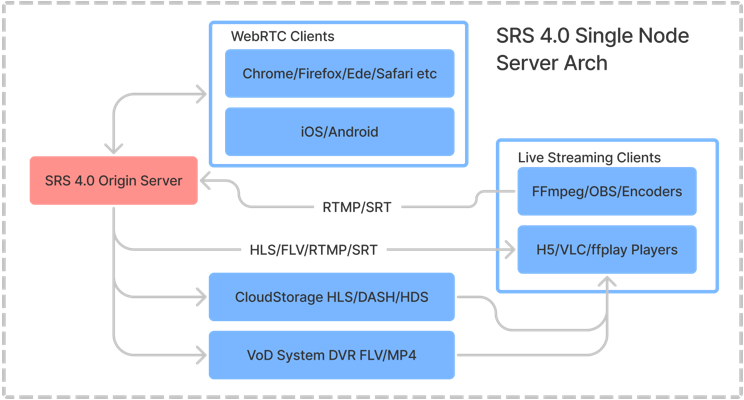
SRS (Simple Realtime Server) 是一个高性能的实时视频服务器,支持RTMP、WebRTC、HLS、HTTP-FLV、SRT等多种协议。作为一个拥有200万行代码、在生产环境广泛应用的开源项目,SRS展现了许多值得学习的现代C++设计思路和最佳实践。本文将深入解析SRS项目的C++代码架构,探索其在高性能、高并发场景下的设计智慧。
项目背景:为什么SRS值得研究?
技术规模与影响力
- 代码规模: 超过200万行C++代码,6000+源文件
- 协议支持: RTMP/WebRTC/HLS/HTTP-FLV/SRT/MPEG-DASH/GB28181
- 平台兼容: Linux/macOS/Windows,支持X86_64/ARMv7/AARCH64/M1/RISCV等架构
- 编解码: H.264/H.265/AV1/VP9/AAC/Opus/G.711
- 生产应用: 被众多公司用于构建直播和实时通信平台
技术挑战
流媒体服务器面临的核心技术挑战包括:
- 低延迟要求: 毫秒级别的延迟控制
- 高并发处理: 同时处理数万路流
- 内存管理: 大量音视频数据的高效处理
- 协议复杂性: 多种协议的状态机管理
- 稳定性要求: 7x24小时稳定运行
这些挑战促使SRS采用了许多精巧的C++设计模式和实践。
现代C++特性的保守与务实使用
C++11标准的选择
SRS项目选择C++11作为基础标准,这在看似保守的选择背后体现了工程项目的务实考量:
// trunk/auto/utest.sh:24
SRS_CPP_VERSION="-std=c++11"
为什么选择C++11而非更新标准?
- 兼容性考虑: 确保在各种老旧系统上的编译兼容性
- 稳定性优先: C++11已经足够成熟,避免新标准的潜在bug
- 性能敏感: 避免新特性带来的性能开销
- 团队协作: 降低团队成员的学习成本
智能指针的自定义实现
SRS没有直接使用std::unique_ptr,而是实现了自己的智能指针系统,这展现了高性能项目的典型做法:
// trunk/src/core/srs_core_autofree.hpp:32-89
template <class T>
class SrsUniquePtr
{
private:
T *ptr_;
void (*deleter_)(T *);
public:
SrsUniquePtr(T *ptr = NULL, void (*deleter)(T *) = NULL)
{
ptr_ = ptr;
deleter_ = deleter;
}
virtual ~SrsUniquePtr()
{
if (!deleter_) {
delete ptr_;
} else {
deleter_(ptr_);
}
}
// C++11 move semantics support
#if __cplusplus >= 201103L
SrsUniquePtr(SrsUniquePtr<T> &&other);
SrsUniquePtr<T> &operator=(SrsUniquePtr<T> &&other);
#endif
};
自定义智能指针的优势:
- 自定义删除器: 支持malloc/free、特殊释放函数
- 性能优化: 避免标准库的额外开销
- 调试友好: 可添加自定义调试信息
- 向后兼容: 支持C++11之前的编译器
模板的精确使用
SRS在模板使用上非常克制,主要用于工具类和类型安全:
// trunk/src/kernel/srs_kernel_mp4.hpp:3027-3047
template <typename T>
std::stringstream &srs_dumps_array(std::vector<T> &arr, std::stringstream &ss,
SrsMp4DumpContext dc,
void (*pfn)(T &, std::stringstream &, SrsMp4DumpContext),
void (*delimiter)(std::stringstream &, SrsMp4DumpContext))
{
for (int i = 0; i < (int)arr.size(); i++) {
if (i > 0 && delimiter) {
delimiter(ss, dc);
}
if (pfn) {
pfn(arr[i], ss, dc);
}
}
return ss;
}
模板使用原则:
- 仅在必要时使用模板,避免过度抽象
- 优先考虑代码可读性和编译速度
- 模板主要用于类型安全和代码复用
内存管理的艺术
RAII模式的彻底贯彻
SRS通过RAII模式确保资源的安全释放:
// trunk/src/core/srs_core.hpp:57-65
#define srs_freep(p) \
delete p; \
p = NULL; \
(void)0
#define srs_freepa(pa) \
delete[] pa; \
pa = NULL; \
(void)0
资源管理器模式
// trunk/src/kernel/srs_kernel_resource.hpp:215-249
template <typename T>
class SrsSharedResource : public ISrsResource
{
private:
SrsSharedPtr<T> ptr_;
public:
SrsSharedResource(T *ptr = NULL) : ptr_(ptr) {}
virtual ~SrsSharedResource() {}
T *operator->() { return ptr_.operator->(); }
T *get() { return ptr_.get(); }
};
内存管理最佳实践:
- 统一的资源管理: 所有资源都通过RAII管理
- 自定义智能指针: 满足特定需求的智能指针实现
- 明确的所有权语义: 通过类型系统表达资源所有权
错误处理的工程化实践
分层错误系统
SRS实现了一个强大的分层错误处理系统:
// trunk/src/kernel/srs_kernel_error.hpp:437-481
class SrsCplxError
{
private:
int code_;
SrsCplxError *wrapped_;
std::string msg_;
std::string func_;
std::string file_;
int line_;
SrsContextId cid_;
int rerrno_;
public:
// 错误链构建
SrsCplxError *wrap(const std::string &msg);
SrsCplxError *transform(int code);
// 错误信息提取
std::string description() const;
int error_code() const { return code_; }
};
错误分类体系
SRS按功能模块对错误进行分类:
// 系统错误 (1000-1099)
#define ERROR_SOCKET_CREATE 1000
#define ERROR_SOCKET_BIND 1002
#define ERROR_SOCKET_LISTEN 1003
// RTMP协议错误 (2000-2999)
#define ERROR_RTMP_HANDSHAKE 2000
#define ERROR_RTMP_PACKET_SIZE 2001
// 应用错误 (3000-3999)
#define ERROR_HLS_DECODE_ERROR 3000
#define ERROR_DVR_CANNOT_OPEN 3001
错误处理最佳实践:
- 分层错误链: 错误可以被包装和传递,保持调用栈信息
- 上下文信息: 每个错误包含完整的调试信息
- 分类管理: 按模块和严重级别分类错误代码
- 性能考虑: 错误对象的创建和销毁要高效
并发编程的创新方案
State Threads协程库
SRS没有使用标准的pthread或C++11线程,而是选择了State Threads库:
// trunk/src/protocol/srs_protocol_st.hpp:22-26
typedef void *srs_netfd_t;
typedef void *srs_thread_t;
typedef void *srs_cond_t;
typedef void *srs_mutex_t;
协程化的网络IO
// 协程式的网络读写
srs_error_t SrsStSocket::read(void *buf, size_t size, ssize_t *nread)
{
*nread = st_read(stfd_, buf, size, ST_UTIME_NO_TIMEOUT);
if (*nread <= 0) {
return srs_error_new(ERROR_SOCKET_READ, "st_read failed");
}
return srs_success;
}
线程安全的锁机制
// trunk/src/protocol/srs_protocol_st.hpp:152-174
#define SrsLocker(instance) \
impl__SrsLocker _SRS_free_instance(instance)
class impl__SrsLocker
{
private:
srs_mutex_t *lock_;
public:
impl__SrsLocker(srs_mutex_t *l) {
lock_ = l;
srs_mutex_lock(*lock_);
}
virtual ~impl__SrsLocker() {
srs_mutex_unlock(*lock_);
}
};
并发编程最佳实践:
- 协程优于线程: 在IO密集型场景下,协程提供更好的性能
- RAII锁管理: 通过RAII确保锁的正确释放
- 事件驱动架构: 基于事件循环的高效并发模型
类型安全与接口设计
前向声明的大量使用
// trunk/src/app/srs_app_server.hpp:27-73
class SrsAsyncCallWorker;
class SrsUdpMuxListener;
class SrsRtcConnection;
class ISrsAsyncCallTask;
class SrsSignalManager;
// ... 更多前向声明
前向声明的价值:
- 编译速度: 减少头文件依赖,提升编译速度
- 解耦合: 降低模块间的耦合度
- 循环依赖: 解决头文件的循环依赖问题
接口抽象的使用
SRS大量使用抽象接口来实现多态和解耦:
class ISrsSignalHandler
{
public:
virtual ~ISrsSignalHandler() {}
virtual srs_error_t on_signal(int signo) = 0;
};
class ISrsResourceManager
{
public:
virtual ~ISrsResourceManager() {}
virtual void subscribe(ISrsResource* c) = 0;
virtual void unsubscribe(ISrsResource* c) = 0;
};
条件编译与平台适配
测试友好的设计
// trunk/src/core/srs_core.hpp:16-25
#ifdef SRS_FORCE_PUBLIC4UTEST
#define SRS_DECLARE_PRIVATE public
#define SRS_DECLARE_PROTECTED public
#else
#define SRS_DECLARE_PRIVATE private
#define SRS_DECLARE_PROTECTED protected
#endif
这个设计让所有私有成员在测试模式下变为public,极大地便利了单元测试。
平台兼容性检查
// trunk/src/core/srs_core.hpp:67-70
#if !defined(__amd64__) && !defined(__x86_64__) && !defined(__i386__) && \
!defined(__arm__) && !defined(__aarch64__) && !defined(__mips__) && \
!defined(__mips64) && !defined(__loongarch64) && !defined(__riscv)
#error "Only support i386/amd64/x86_64/arm/aarch64/mips/mips64/loongarch64/riscv cpu"
#endif
性能优化的细节考量
内存池和对象复用
SRS在关键路径上大量使用对象池和内存池技术:
// 包对象的复用管理
class SrsPacketManager
{
private:
std::vector<SrsRtpPacket*> free_packets_;
public:
SrsRtpPacket* acquire_packet() {
if (!free_packets_.empty()) {
SrsRtpPacket* pkt = free_packets_.back();
free_packets_.pop_back();
return pkt;
}
return new SrsRtpPacket();
}
void release_packet(SrsRtpPacket* pkt) {
pkt->reset();
free_packets_.push_back(pkt);
}
};
零拷贝技术
在媒体数据处理中,SRS尽可能避免不必要的内存拷贝:
class SrsBuffer
{
private:
char* data_;
int size_;
int pos_;
public:
// 返回当前位置的指针,避免拷贝
char* current() { return data_ + pos_; }
// 直接在缓冲区上操作
void skip(int size) { pos_ += size; }
};
现代C++特性的取舍思考
为什么不用更新的C++标准?
- 兼容性至上: 流媒体服务器需要在各种环境中部署
- 性能第一: 避免新特性可能带来的性能开销
- 稳定性考虑: 生产环境优先选择成熟稳定的技术
- 团队效率: 降低学习成本,提高开发效率
哪些现代特性值得采用?
建议采用的特性:
auto关键字:提高代码可读性- Lambda表达式:简化回调和算法
- 智能指针:改善内存管理
- 右值引用:优化性能关键路径
constexpr:编译时计算
需要谨慎的特性:
- 复杂模板:可能影响编译速度和调试
- 异常:在高性能场景下开销较大
- 标准库算法:不一定比手写代码更高效
- 新的并发库:可能不如专门的高性能库
总结:工程实践的智慧
SRS项目展现了现代C++在大型工程项目中的最佳实践:
设计原则
- 性能优先: 所有设计决策都以性能为首要考量
- 稳定可靠: 优先选择成熟稳定的技术方案
- 可维护性: 代码结构清晰,便于长期维护
- 可测试性: 设计时考虑测试的便利性
技术选择
- 保守的标准选择: C++11提供了足够的现代特性
- 自定义核心组件: 针对性能需求定制关键组件
- 接口驱动设计: 通过抽象接口实现模块解耦
- RAII贯彻始终: 确保资源管理的安全性
工程化思维
- 分层架构: 清晰的模块分层和职责划分
- 错误处理: 完善的错误分类和处理机制
- 平台兼容: 考虑多平台部署的兼容性
- 性能调优: 在关键路径上进行精细优化
SRS项目证明了现代C++不一定要追求最新的语言特性,而是要根据项目特点选择合适的技术栈。在高性能、高可靠性要求的系统中,工程化的设计思维比语言特性的新颖性更为重要。
对于其他C++项目,SRS的经验告诉我们:
- 根据需求选择技术:不是越新越好,而是越合适越好
- 性能与可维护性平衡:在性能要求和代码可维护性之间找到平衡
- 工程化思维:把代码当作工程来设计,考虑长期维护和团队协作
- 渐进式演进:在稳定的基础上渐进式地引入新技术
这些实践经验对于开发高质量的C++项目具有重要的指导意义。
本文基于SRS 6.0版本代码分析,SRS是一个持续演进的开源项目,代码地址:https://github.com/ossrs/srs

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 33
33 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)