【即插即用模块】注意力篇 | AAAI 2026 | StripConv:交叉条带大核卷积块,特征全面捕获与增强,多场景全涨点!
VX: shixiaodayyds,备注【即插即用】,添加即插即用模块交流群。
模块出处
Paper:Strip R-CNN: Large Strip Convolution for Remote Sensing Object Detection
Code:https://github.com/HVision-NKU/Strip-R-CNN
模块介绍
Strip模块架构:传统方形中核卷积+正交的条带大核卷积+逐点卷积。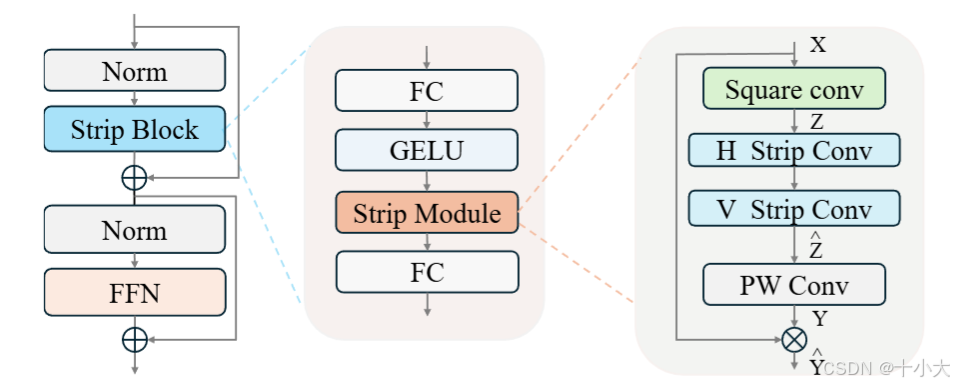
创新点:通过交叉条纹状卷积实现定向关联捕捉,突破传统方形卷积的局限,用交叉条纹核捕捉长距离定向特征,形成水平 + 垂直条纹状感受野。中核+大核+逐点,全面捕获各空间各方向各层级的特征。
模块提出的动机(Motivation)
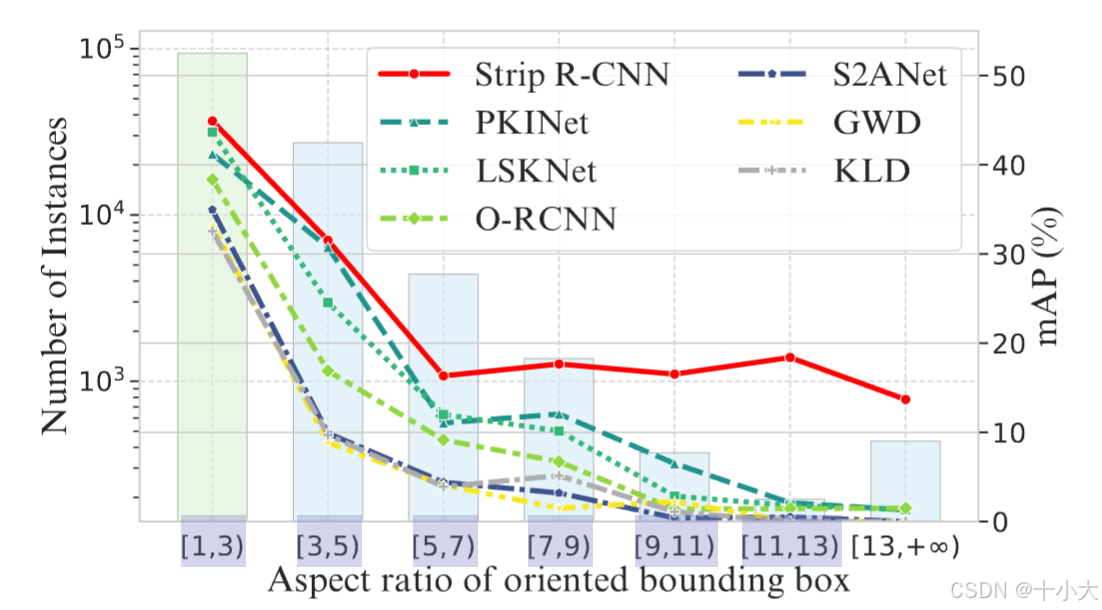
虽然发展迅速,但遥感目标检测对于检测高纵横比目标仍然具有挑战性。本文表明,大条带卷积是遥感目标检测的良好特征表示学习器,可以很好地检测各种纵横比的对象。基于大条带卷积,我们构建了一个名为 Strip R-CNN 的新型网络架构,它简单、高效、强大。与最近的利用方形大核卷积的遥感目标检测器不同,我们的条带R-CNN利用骨干网StripNet中的顺序正交大条带卷积来捕获空间信息。此外,我们通过解耦检测头并将定位分支配备条带头中的条带卷积来提高遥感目标检测器的定位能力。
与其他大核架构对比: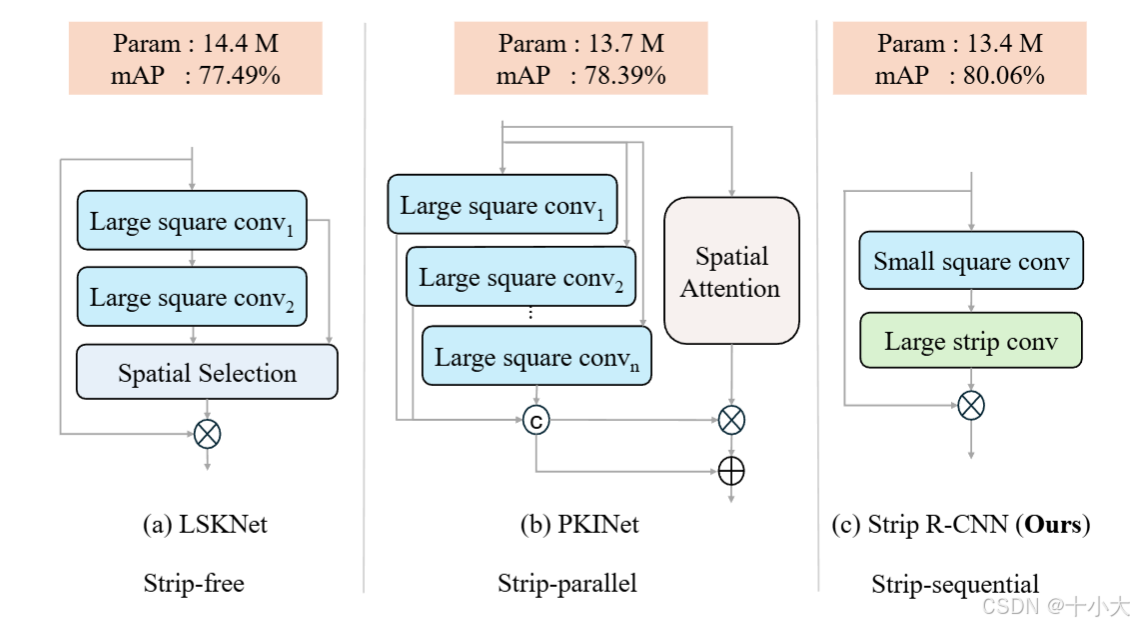
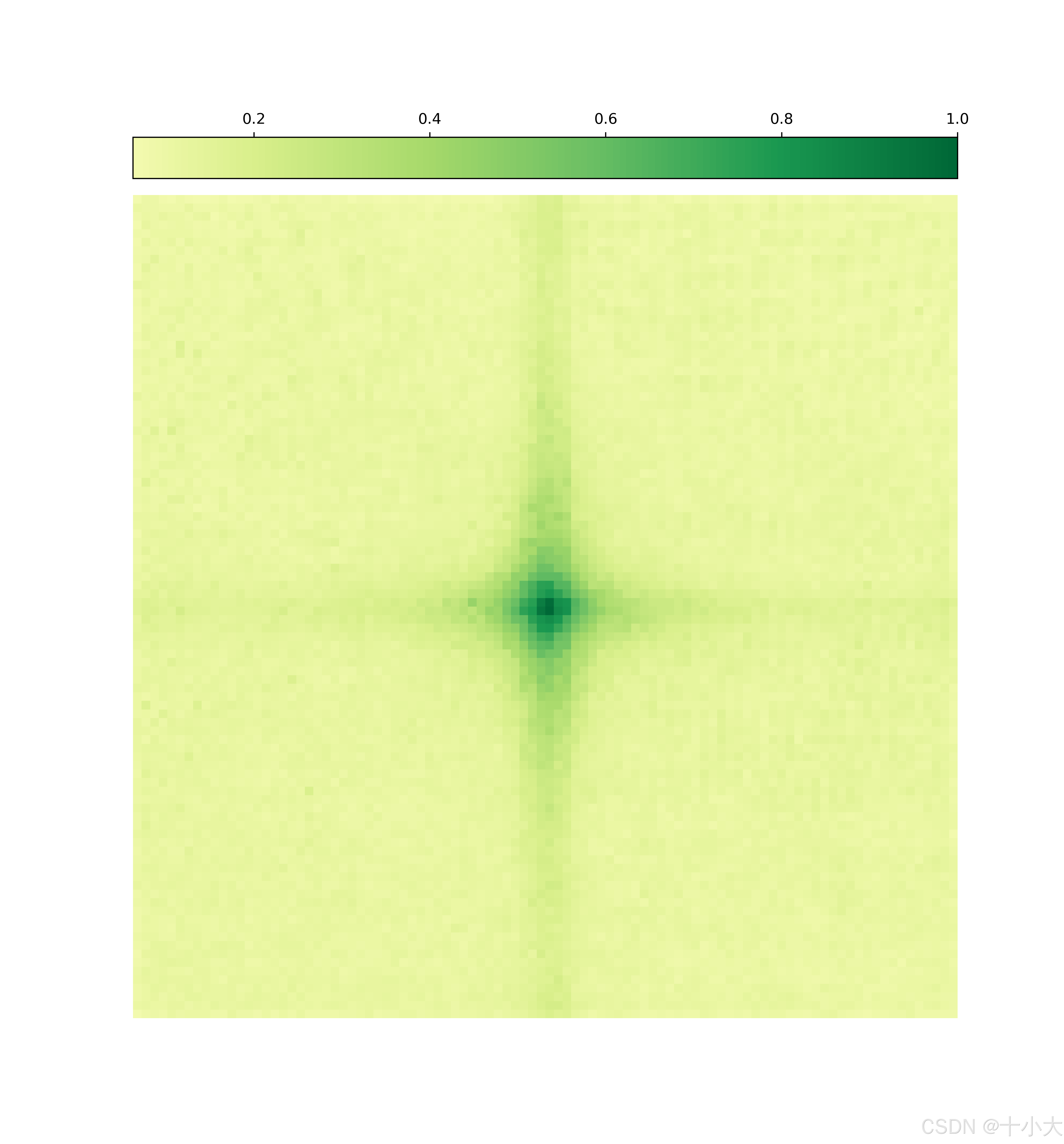
注:条带卷积不是什么新东西,基本上涉及大核卷积的方法基本都会用条带卷积轻量化,比如SLak、PeLK等。轻量化过程为K×K的标准大核卷积(计算成本极高)→ K×K的大核DWConv(每个通道分组降低计算成本)→ 1×K+K×1的大核条带卷积(正交比方形更轻但性能略降,再用其他结构补足)。感受野如下图所示:
| 1×51+51×1 | 1×101+101×1 |
|---|---|
 |
 |
适用范围与模块效果
适用范围:适用于通用视觉领域,特别是长距离定向特征任务(小目标检测分割/遥感/红外/医学等存在极小特征的数据)与轻量级任务。
缝合位置:特征提取层,瓶颈块,特征增强层。
模块效果:SOTA对比。
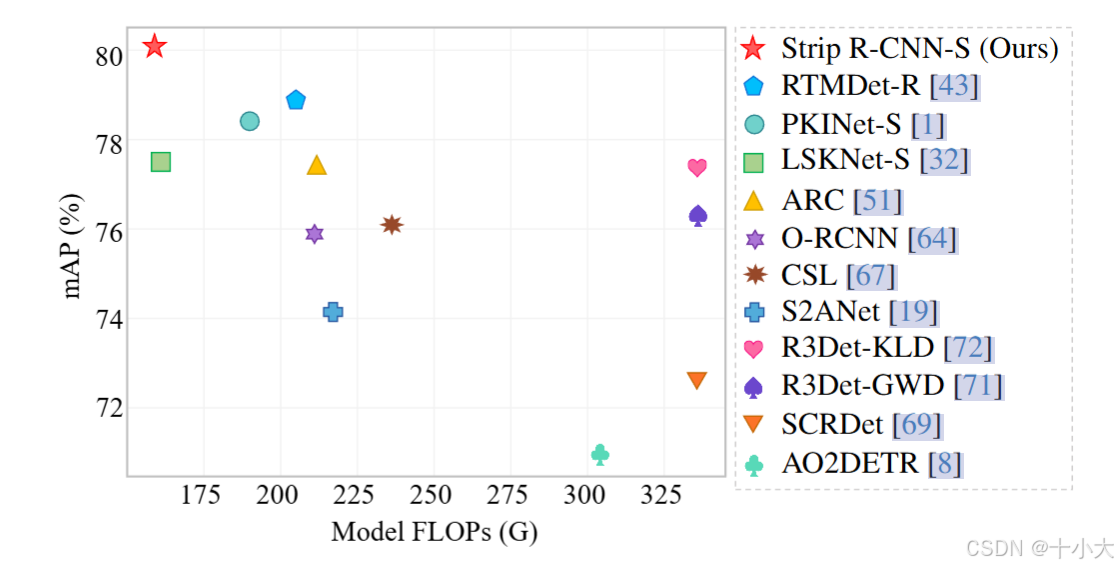
既轻又准:
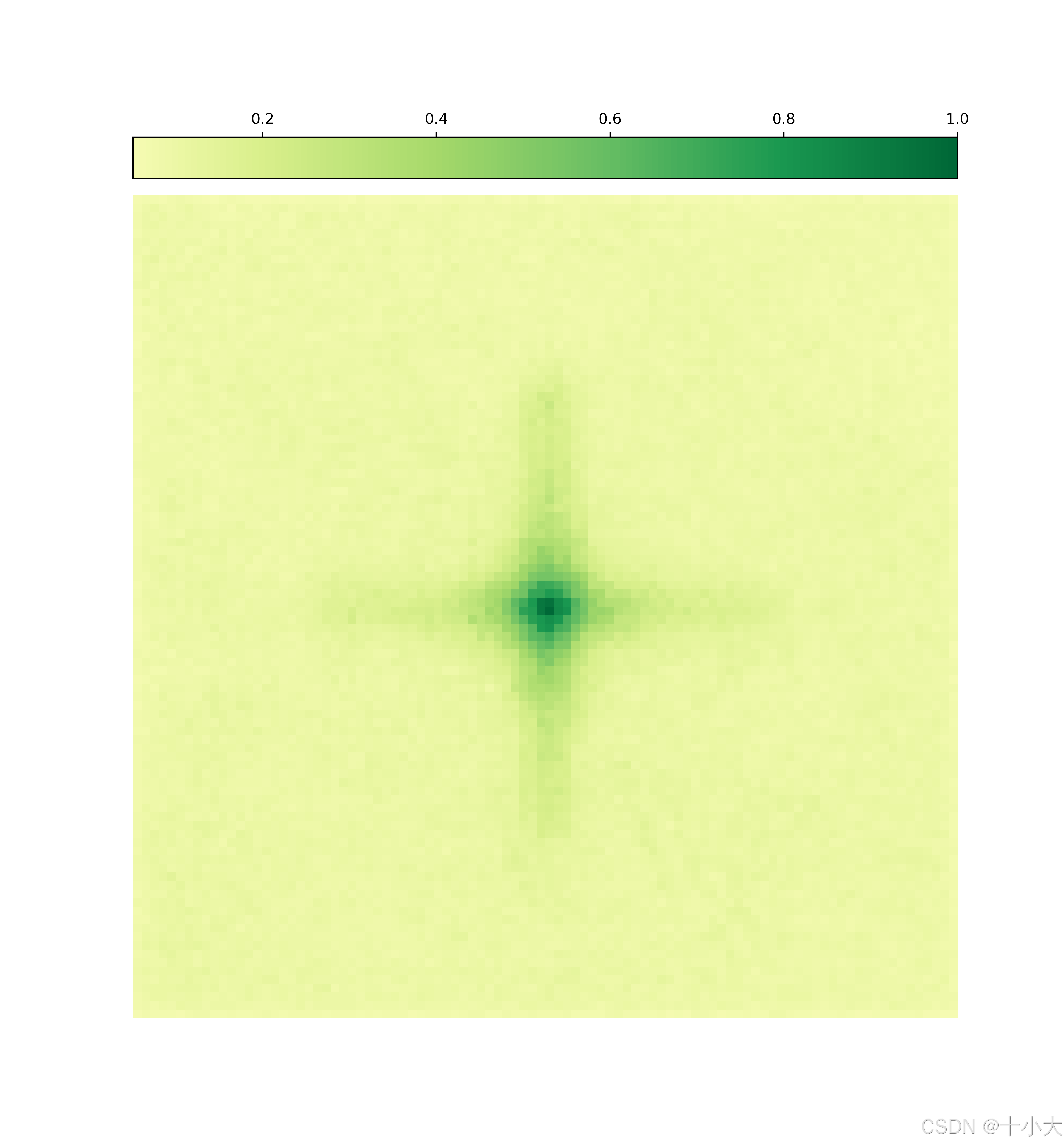
空间相关性更好: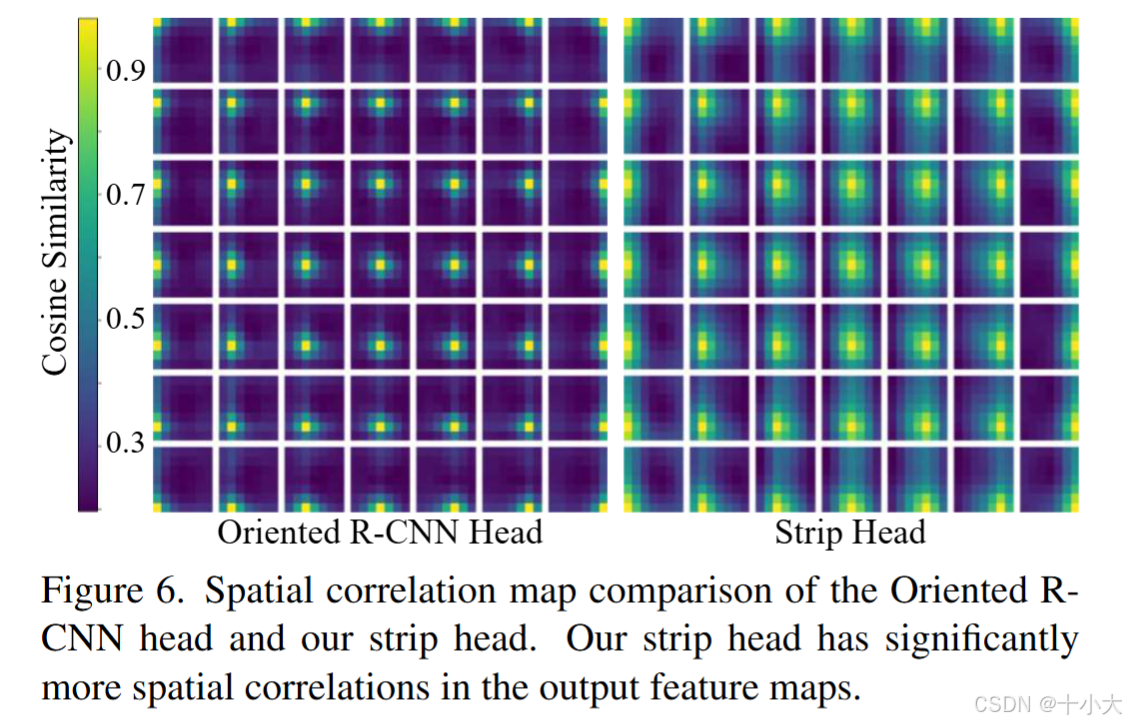
与其他架构相比,更轻更准: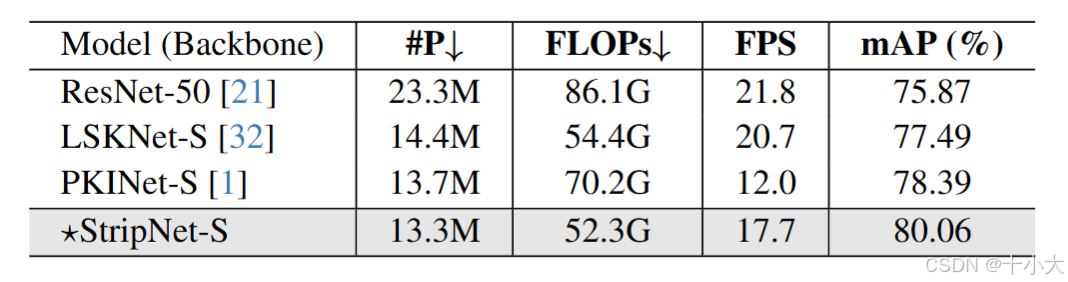
消融研究:方形卷积5×5,条带卷积1×19+19×1最优。第二行和第四五行相比,说明条带卷积比传统方形卷积更好(遥感目标检测任务,其他任务上是否更优需实测)。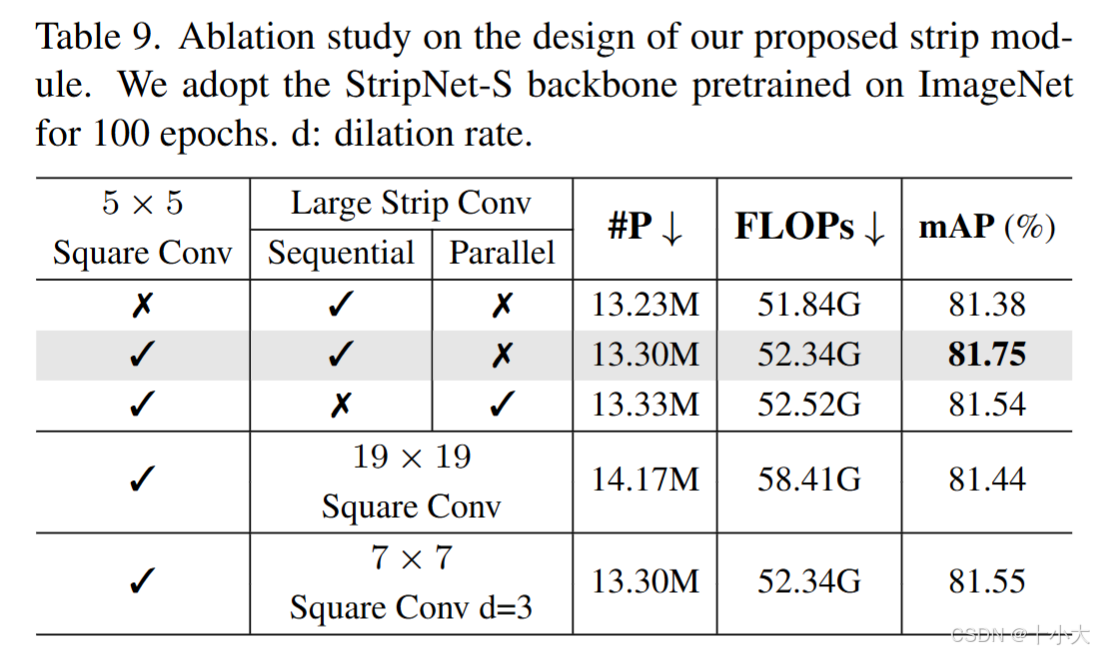
模块代码及使用方式
代码逻辑:
模块代码(详细注释与特征流前向传播过程中的维度变化):
import torch
import torch.nn as nn
class StripBlock(nn.Module):
"""
条纹注意力核心块(StripBlock):通过交叉条纹状分组卷积生成空间注意力权重
核心作用:
1. 条纹卷积捕捉定向空间关联(如水平/垂直纹理);
2. 分组卷积实现轻量化,降低计算量;
3. 生成注意力权重与输入特征逐元素乘法,实现空间特征筛选。
输入:特征图 [B, dim, H, W](B=批次,dim=通道数,H/W=高/宽)
输出:注意力权重图 [B, dim, H, W](与输入维度一致,用于加权)
"""
def __init__(self, dim, k1, k2):
"""
参数初始化:
dim: 输入/输出通道数(需保持一致,适配分组卷积)
k1/k2: 条纹卷积核尺寸((k1,k2)与(k2,k1)交叉,形成条纹状感受野)
"""
super().__init__()
# 1. 初始卷积:5×5分组卷积,初步提取空间特征
self.conv0 = nn.Conv2d(dim, dim, 5, padding=2, groups=dim) # 分组数=通道数,深度可分离卷积
# 2. 条纹卷积1:(k1,k2)核,捕捉第一方向条纹关联(如水平长条纹)
self.conv_spatial1 = nn.Conv2d(
dim, dim, kernel_size=(k1, k2), stride=1,
padding=(k1//2, k2//2), groups=dim
)
# 3. 条纹卷积2:(k2,k1)核,捕捉交叉方向条纹关联(如垂直长条纹)
self.conv_spatial2 = nn.Conv2d(
dim, dim, kernel_size=(k2, k1), stride=1,
padding=(k2//2, k1//2), groups=dim
)
# 4. 1×1卷积:融合条纹特征,生成最终注意力权重
self.conv1 = nn.Conv2d(dim, dim, 1)
def forward(self, x):
"""前向传播:初始卷积→条纹卷积1→条纹卷积2→权重生成"""
# 步骤1:初始空间特征提取
attn = self.conv0(x)
# 步骤2:交叉条纹卷积,捕捉双向定向关联
attn = self.conv_spatial1(attn)
attn = self.conv_spatial2(attn)
# 步骤3:生成注意力权重
attn = self.conv1(attn)
return x * attn
class Attention(nn.Module):
"""
条纹注意力模块(StripAttn):封装StripBlock与门控机制,实现轻量化空间特征增强
核心创新:
1. 条纹状空间注意力:定向捕捉长距离空间关联,比传统注意力效率高;
2. 空间门控机制:GELU激活+StripBlock生成权重,动态筛选特征;
3. 轻量化设计:全分组卷积+1×1投影,计算量仅为传统注意力的1/10;
4. 即插即用:输入输出维度一致,支持无缝替换传统卷积/注意力块。
输入:特征图 [B, d_model, H, W]
输出:增强后特征 [B, d_model, H, W](与输入维度完全一致)
"""
def __init__(self, d_model, k1, k2):
"""
参数初始化:
d_model: 输入/输出通道数
k1/k2: 条纹卷积核尺寸(如(1,19)形成水平长条纹,(19,1)形成垂直长条纹)
"""
super().__init__()
# 1. 1×1投影层1:调整特征通道,为门控做准备
self.proj_1 = nn.Conv2d(d_model, d_model, 1)
# 2. 激活函数:GELU,增强非线性表达
self.activation = nn.GELU()
# 3. 空间门控单元:StripBlock生成注意力权重
self.spatial_gating_unit = StripBlock(d_model, k1, k2)
# 4. 1×1投影层2:融合门控特征,恢复通道
self.proj_2 = nn.Conv2d(d_model, d_model, 1)
def forward(self, x):
"""
前向传播流程:残差保存→投影增强→激活→空间门控→投影融合→残差输出
"""
shortcut = x.clone() # 保存残差连接的原始特征
# 步骤1:特征投影与激活
x = self.proj_1(x) # 1×1卷积调整特征
x = self.activation(x) # 非线性激活增强
# 步骤2:空间门控(条纹注意力权重生成+加权)
x = self.spatial_gating_unit(x) # 生成注意力权重
# 步骤3:投影融合与残差连接
x = self.proj_2(x) # 融合特征
x = x + shortcut # 残差融合,避免梯度消失
return x
if __name__ == "__main__":
device = torch.device('cuda:0' if torch.cuda.is_available() else 'cpu')
x = torch.randn(1, 64, 32, 32).to(device)
model = Attention(64, 1, 19)
model.to(device)
y = model(x)
print("微信公众号:十小大的底层视觉工坊")
print("VX: shixiaodayyds, 备注【即插即用】添加交流群")
print("知乎、CSDN:十小大")
print("输入特征维度:", x.shape)
print("输出特征维度:", y.shape)
运行结果:
至此本文结束。
如果本文对你有所帮助,请点赞收藏,创作不易,感谢您的支持!
点击下方👇公众号区域,扫码关注,可免费领取一份200+即插即用模块资料!

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐



 27
27 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)