DEIMv2部署和训练笔记
-
下载项目
项目地址:
https://github.com/Intellindust-AI-Lab/DEIM
打开网页后,可以选择下载方式,本次用的是下载zip的方式,将下载得到的文件解压到E:\DEIM-main目录下:
接下来,跟着项目的README.md文件,一步一步部署和运行项目。
1、预训练模型
![]()
在GitHub的项目网页中,列出了下面两种预训练模型:
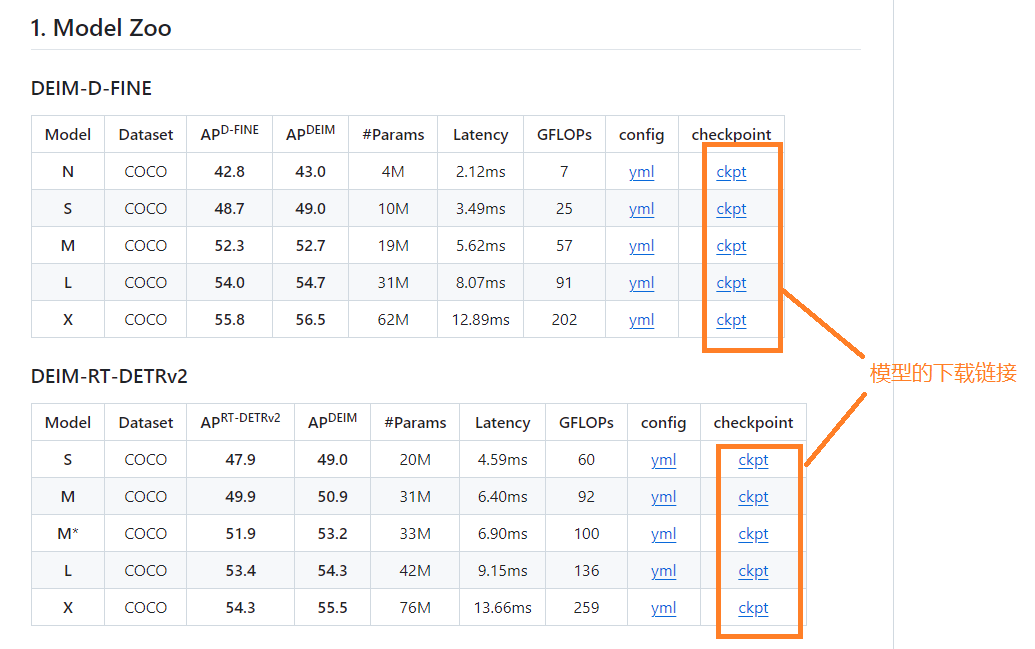
两种模型都很优秀,根据需要选择基于D-FINE或RT-DERT的DEIM模型。
如果想深入了解这两个模型,它们的项目地址:
https://github.com/lyuwenyu/RT-DETR/blob/main/README_cn.md
以及
https://github.com/Peterande/D-FINE/blob/master/README_cn.md
可以打开以上网址了解或下载。
两种模型的适用场景:
两种模型分别适用哪些应用场景,我问了豆包,总结如下:
基于 DEIMv2 技术改进的 D-FINE(如 DEIM-D-FINE)和 RT-DETRv2(及结合 DEIMv2 的版本),由于核心设计目标和性能侧重不同,适用场景存在明显差异,具体如下:
-
基于 DEIMv2 的 D-FINE(如 DEIM-D-FINE)适用场景
DEIM-D-FINE 的核心优势是在保持实时性的同时,通过 DEIM 的训练优化策略进一步提升检测精度,尤其强化了小目标和复杂场景的表现,因此更适合对精度有较高要求、且需要平衡速度的场景:
- 安防监控:需检测远距离小目标(如远处行人、车辆细节),同时要求实时反馈(如异常行为预警)。
- 无人机巡检:航拍场景中目标尺度差异大(从近处大型设备到远处小型部件),需高精度识别故障或异常,且无人机算力有限,需高效模型。
- 智能驾驶(低算力场景):如低速自动驾驶(园区、港口),需检测周边行人、障碍物(包括小目标如锥桶),同时适配车载中端芯片(如 NVIDIA Jetson 系列)。
- 工业质检:生产线中检测微小缺陷(如电子元件的划痕、焊点瑕疵),要求高精度且实时响应(不影响生产节拍)。
基于 DEIMv2 的 RT-DETRv2 适用场景
RT-DETRv2 本身是面向极致实时性的检测器,结合 DEIMv2 后进一步优化了效率和多尺度适应性,更适合对速度要求苛刻、硬件资源受限的场景:
- 移动端实时应用:如手机端视频特效(实时手势 / 物体跟踪)、短视频内容审核(快速识别违规物体),需在低功耗移动芯片(如骁龙、天玑)上实现毫秒级推理。
- 高速实时追踪:如体育赛事直播中的运动员实时追踪、车流监控中的高速车辆计数,要求模型在高帧率(30fps 以上)下稳定运行。
- 边缘计算设备:如嵌入式摄像头(智能门铃、家用监控),硬件算力有限(通常为 ARM 架构),需轻量化模型满足实时性(延迟<50ms)。
- 大规模部署场景:如城市级摄像头联网监控,需在服务器集群中同时处理数千路视频流,模型需兼顾单路速度和资源占用(降低显存 / 内存消耗)。
核心差异总结
| 维度 | 基于 DEIMv2 的 D-FINE | 基于 DEIMv2 的 RT-DETRv2 |
|---|---|---|
| 性能侧重 | 精度优先,兼顾实时性(尤其小目标) | 速度优先,极致效率(多尺度适配) |
| 硬件适配 | 中端算力设备(如 Jetson、中端 GPU) | 低算力设备(移动端、边缘设备) |
| 场景关键词 | 小目标、复杂场景、高精度需求 | 高速实时、大规模部署、低功耗 |
选择时需根据场景的精度需求、硬件算力、实时性要求三者平衡:高精度 + 中小算力选 DEIM-D-FINE;高速度 + 低算力选 DEIMv2 优化的 RT-DETRv2。
模型下载
我下载了以上所有的yml文件和checkpoint文件,并上传到百度网盘,方便没法上科学网时下载。
https://pan.baidu.com/s/1n86W_Ud2XE2h3iscXWPzVQ?pwd=2emu 提取码2emu
2、快速开始
-
配置环境
按要求,创建conda环境并安装requirements.txt中指定的包。
conda create -n deim python=3.11.9
conda activate deim
pip install -r requirements.txt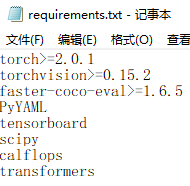
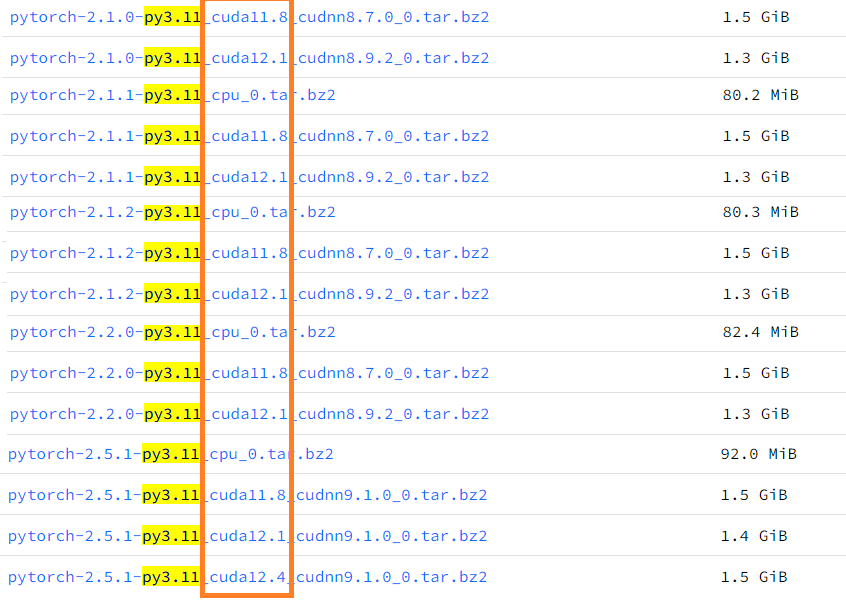
需要注意的是,cuda版本应该是11.8或12.1、12.4,因为requirements.txt中要求torch>=2.0.1,环境的python=3.11,符合这两个条件的cuda版本只有11.8和12.1、12.4,可以在下面的网页查询到合适的版本:
https://mirrors.tuna.tsinghua.edu.cn/anaconda/cloud/pytorch/linux-64/
查询的结果:
Windows系统下,直接安装requirements.txt,会安装一个CPU版的pytorch,无法使用GPU。所以需要把requirements.txt中的pytorch和torvision去掉,手动安装这两个(CUDA版的),然后再自动安装requirements.txt中的其余包。
关于torch的版本,按照项目要求是>=2.0.1,但是安装了2.0.1后会出错,提示:
Disabling PyTorch because PyTorch >= 2.1 is required but found 2.0.1+cu118如果安装了2.1.1的pytorch,运行中会报错:
AttributeError: module 'torch.utils._pytree' has no attribute 'register_pytree_node'. Did you mean: '_register_pytree_node'?经实践,合适的版本是2.1.0,安装torch的指令:
pip install torch==2.1.0+cu118 torchvision==0.16.0+cu118 --index-url https://download.pytorch.org/whl/cu118-
准备数据集
首先,准备图片,并将其存放在同一个文件夹内。我这里从coco数据集中选了200张图片作为实验数据,如果使用自己的图片,方法相同。
然后,选择一个标注软件进行标注。常见的标注软件有CVAT、labelme、makesense.ai等,这里选择了makesense.ai,相对来说简单易用。
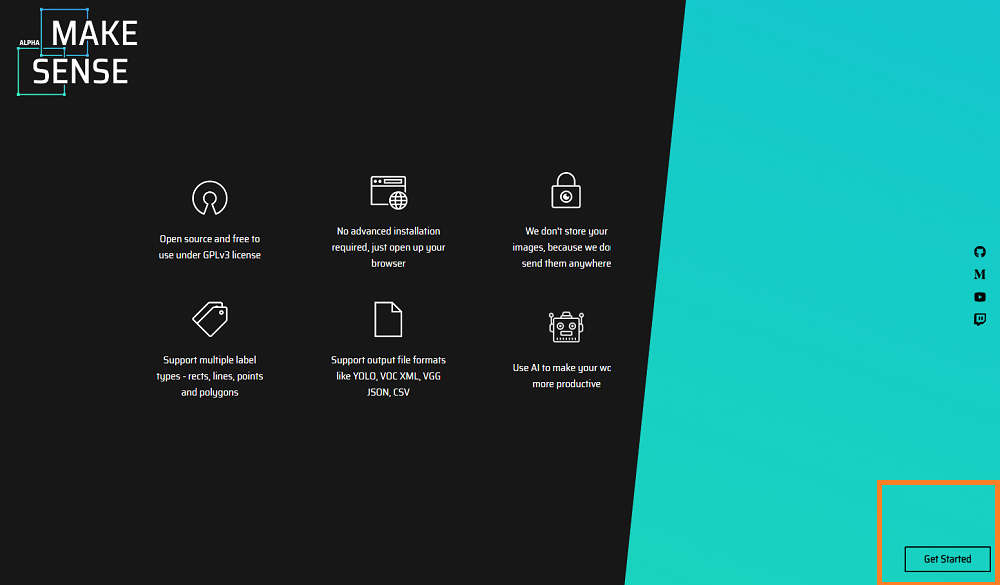
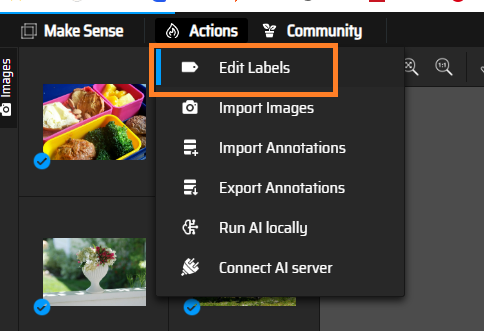
- makesense.ai的使用方法:
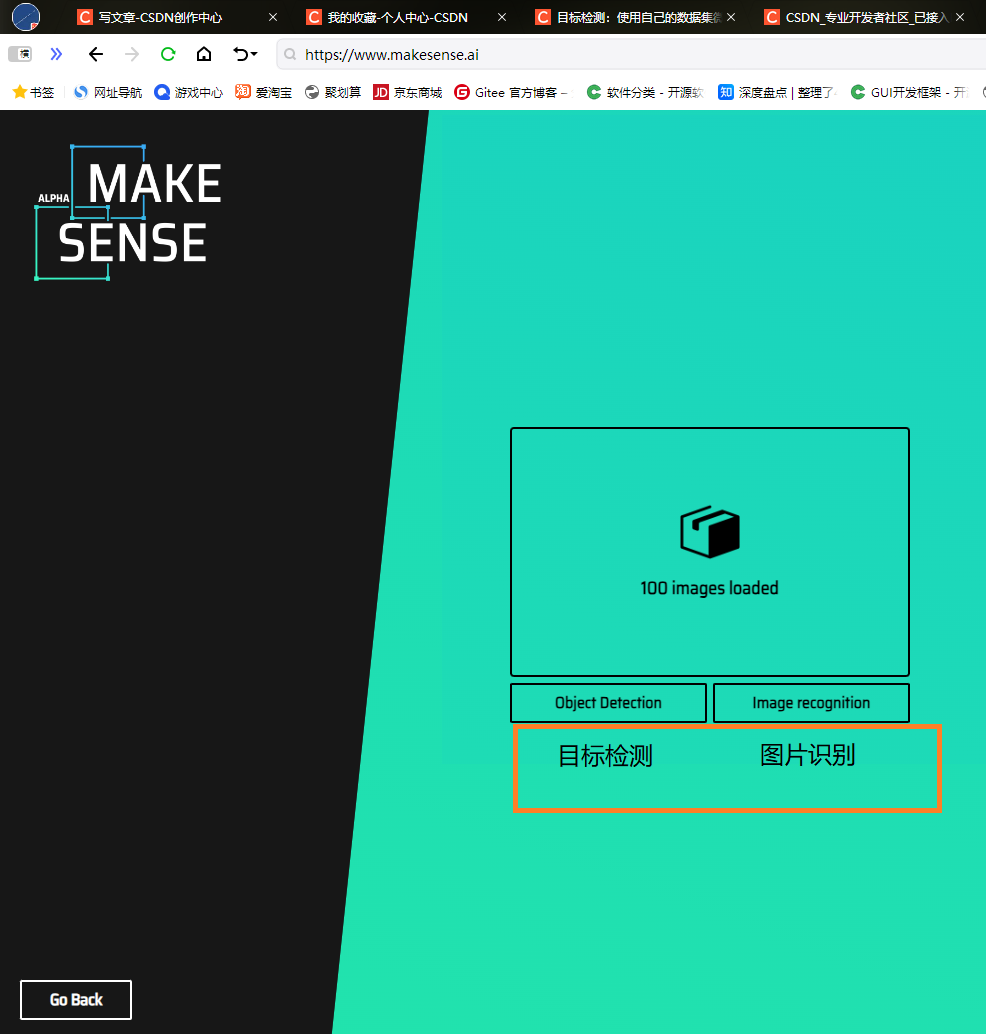
打开网址:https://www.makesense.ai/,在网页中直接就可以进行操作。打开网页后点击:Get Starteted
然后:
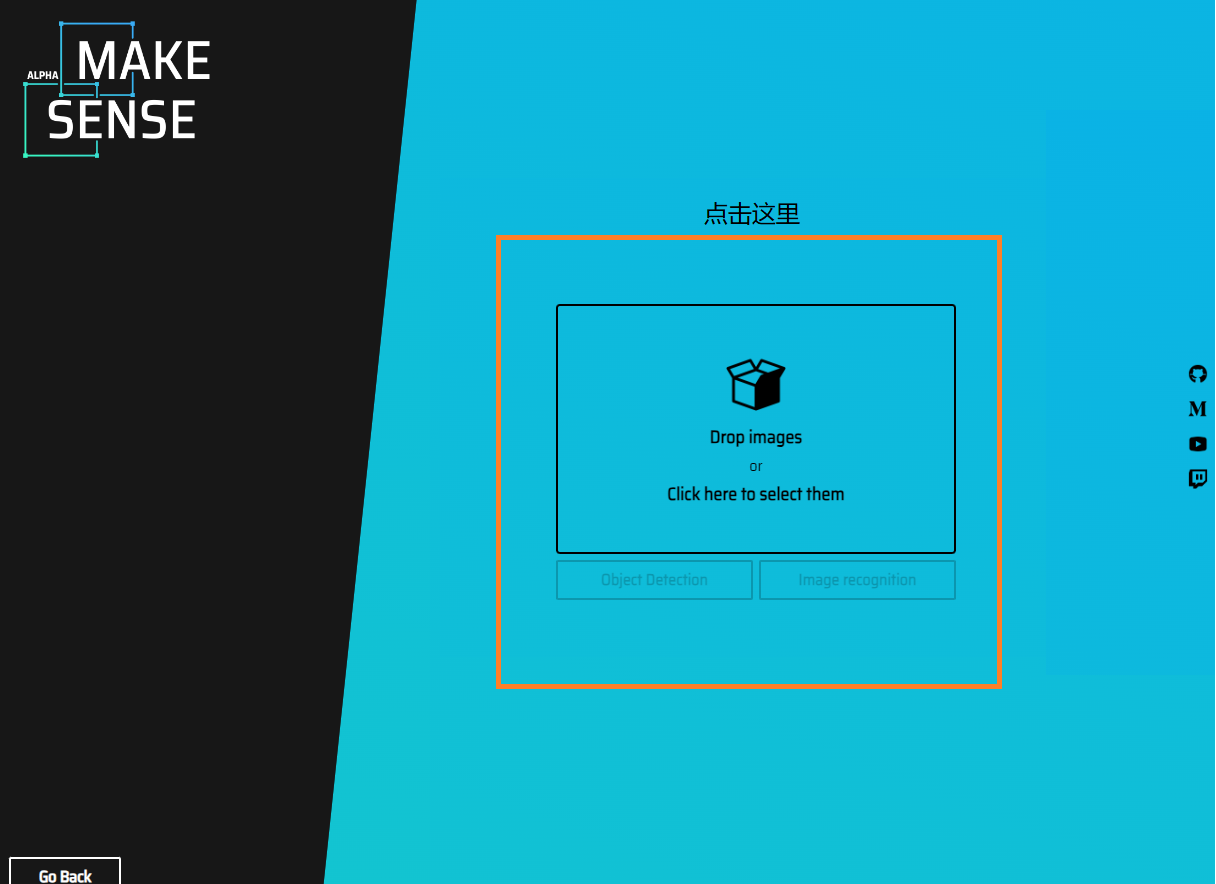
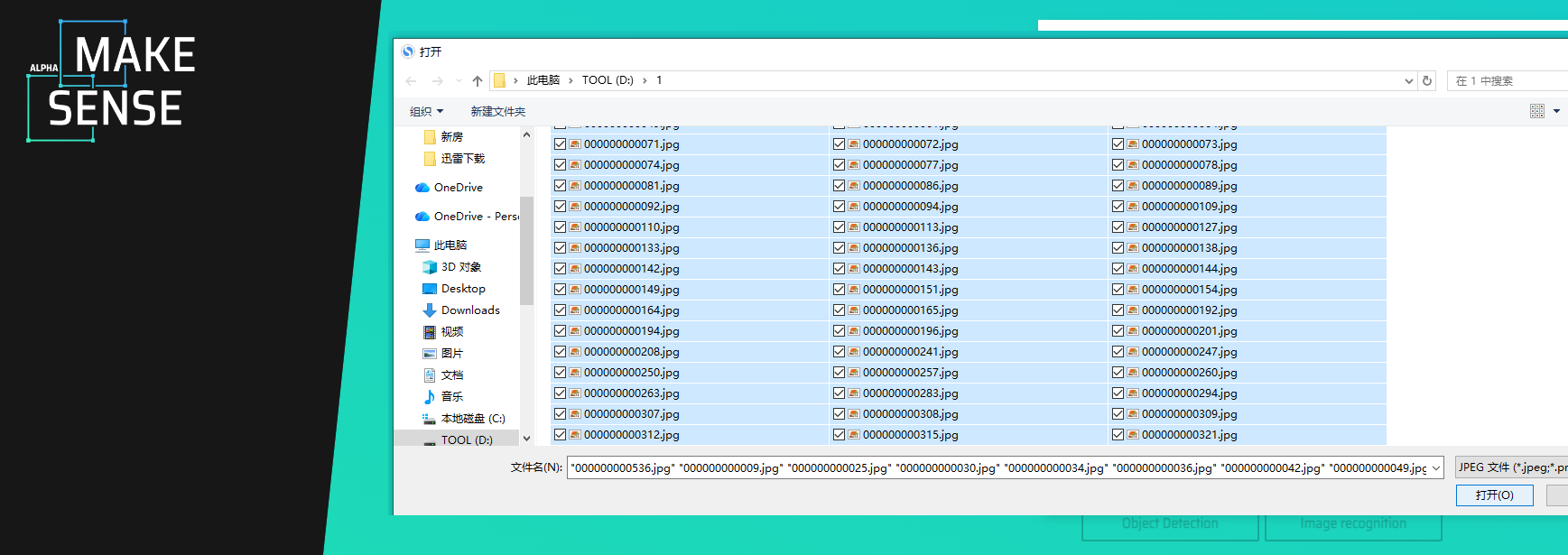
选择100个文件:
 选择标注类型:
选择标注类型:
两种模式的区别:
- 目标检测(Object Detection):“框”出每个物体,告诉模型“图里有猫、狗,分别在哪”。
- 图片识别/分类(Image Classification):“整图”打标签,告诉模型“这张图就是猫,别管它在哪”。
这里选目标检测。
网页出现了选择类别标签的界面:
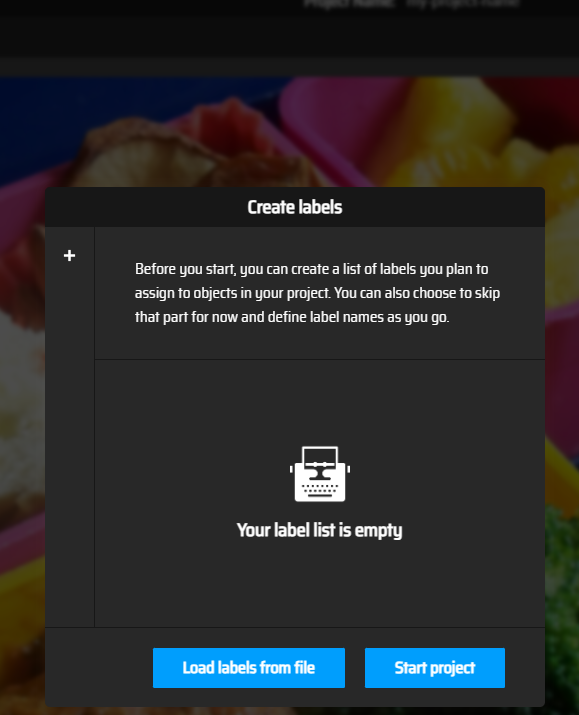
可以在网页上随时输入类别标签,也可以提前编辑好物体的类别,每一类占一行存为txt文件后,点击:Load labels from file导入txt文件。
导入成功:
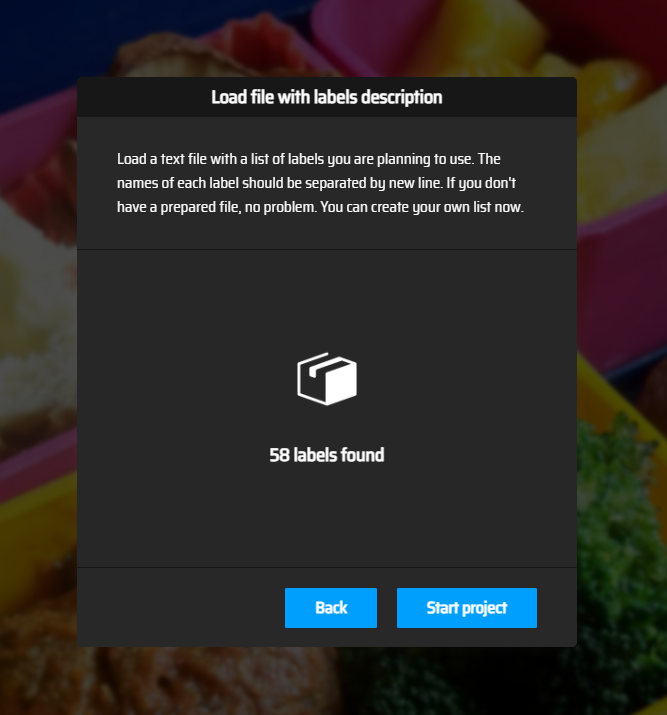
点击Start project开始标注,使用多边形工具:
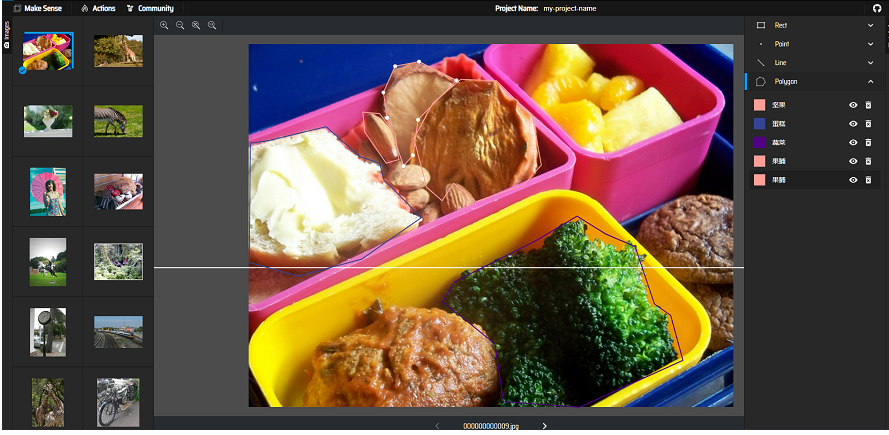
在标注过程中可以随时编辑和增加标签:
标注完成后,导出标注结果:
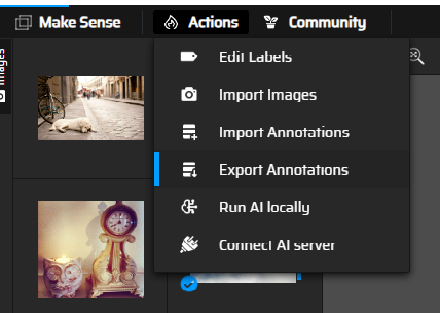
选择了coco格式:
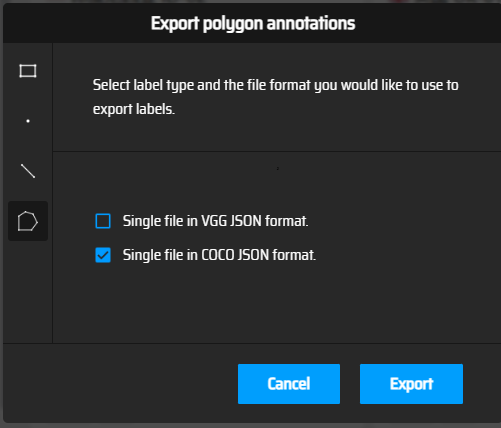
点击Export,浏览器会下载得到的标注文件,其内容如下:
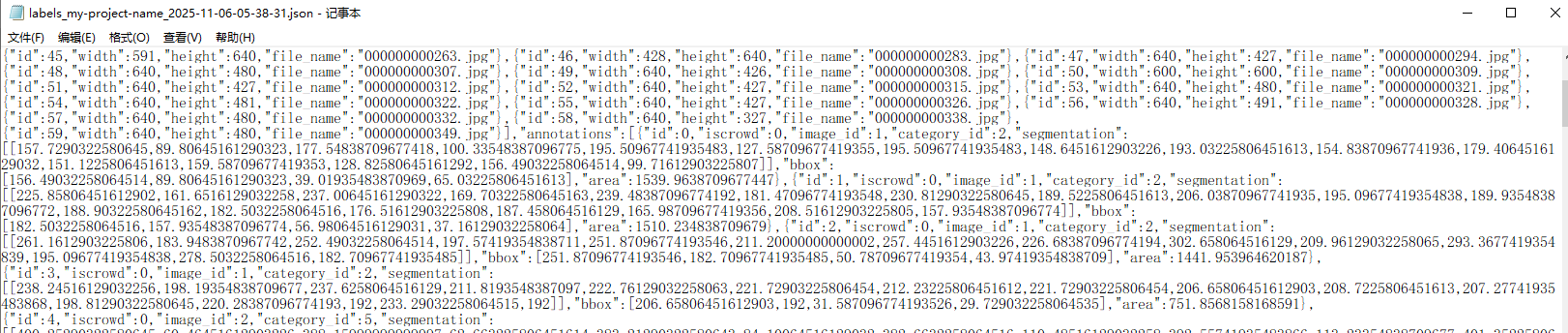
至此,得到了训练集的100张图片的标注文件。
用同样的方法,再标注100张图片,作为验证集。
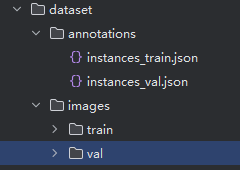
按照项目的要求,如果使用自定义数据,使用以下的文件结构:
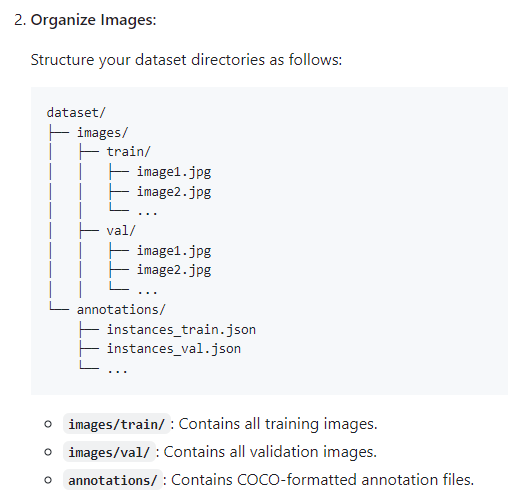
按照要求,创建目录并将前面步骤训练集的100张图片复制到E:\DEIM-main/dataset/images/train/,验证集的100张图片复制到E:\DEIM-main/dataset/images/val/。训练集和验证集的标注文件复制到E:\DEIM-main/dataset/,并分别将文件名改为:instances_train.json和instances_val.json:
-
修改配置
修改custom_detection.yml,它的文件位置在:
需要修改的内容:
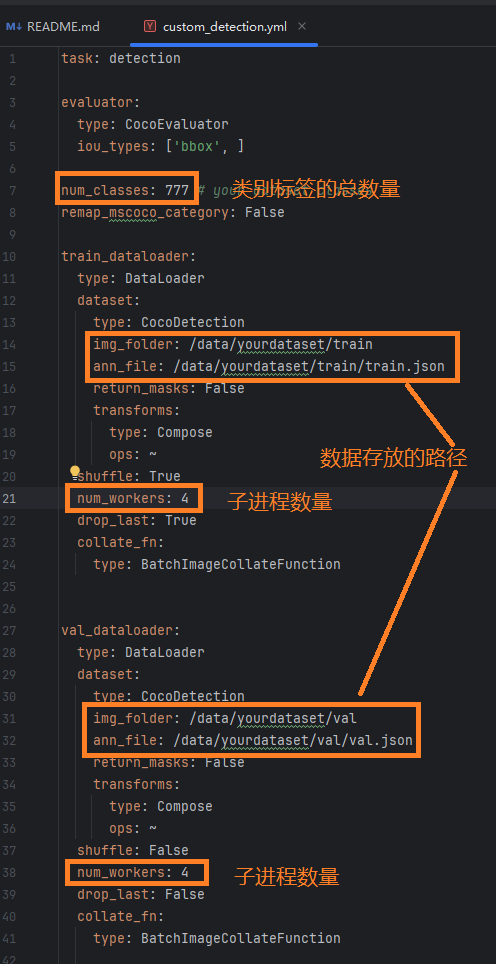
修改后的实际文件:
task: detection
evaluator:
type: CocoEvaluator
iou_types: ['bbox', ]
num_classes: 58 # your dataset classes
remap_mscoco_category: False
train_dataloader:
type: DataLoader
dataset:
type: CocoDetection
img_folder: dataset/images/train
ann_file: dataset/annotations/instances_train.json
return_masks: False
transforms:
type: Compose
ops: ~
shuffle: True
num_workers: 1
drop_last: True
collate_fn:
type: BatchImageCollateFunction
val_dataloader:
type: DataLoader
dataset:
type: CocoDetection
img_folder: dataset/images/train
ann_file: dataset/annotations/instances_val.json
return_masks: False
transforms:
type: Compose
ops: ~
shuffle: False
num_workers: 4
drop_last: False
collate_fn:
type: BatchImageCollateFunction
3、使用方法
![]()
-
训练:
在项目中给出了一条训练的指令:
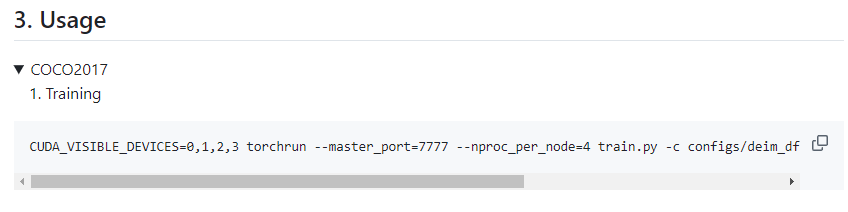
CUDA_VISIBLE_DEVICES=0,1,2,3 torchrun --master_port=7777 --nproc_per_node=4 train.py -c configs/deim_dfine/deim_hgnetv2_${model}_coco.yml --use-amp --seed=0
命令详解:
-
CUDA_VISIBLE_DEVICES=0,1,2,3:指定训练可使用的 GPU 设备编号为 0、1、2、3(共 4 张 GPU),限制程序只能访问这些 GPU。 -
torchrun:PyTorch 官方推荐的分布式训练启动工具,替代了旧的torch.distributed.launch,能自动管理进程和节点通信。 -
--master_port=7777:指定主节点(master)的通信端口为 7777,用于分布式进程间的初始化通信(需确保端口未被占用)。 -
--nproc_per_node=4:指定每个节点(当前机器)启动 4 个进程,与可用 GPU 数量(4 张)对应,通常每个进程绑定一张 GPU。 -
train.py:训练脚本的入口文件。 -
-c configs/deim_dfine/deim_hgnetv2_${model}_coco.yml:通过-c参数指定训练配置文件路径,其中${model}是一个变量(需提前定义具体模型名称,如large、base等),配置文件包含数据集路径、模型参数、训练超参等设置。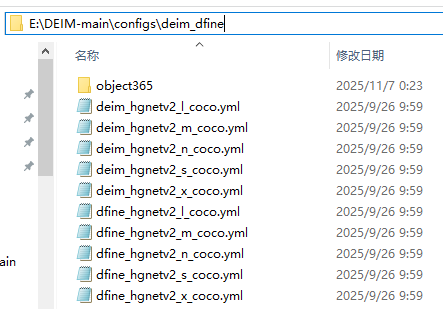
-
--use-amp:启用混合精度训练(Automatic Mixed Precision),加速训练并减少显存占用。 -
--seed=0:设置随机种子为 0,保证实验的可复现性。 -
更多的训练参数,在项目的train.py中有定义:
# priority 0 parser.add_argument('-c', '--config', type=str, required=True) # 配置项,必需的 parser.add_argument('-r', '--resume', type=str, help='resume from checkpoint') # 从检查点恢复 parser.add_argument('-t', '--tuning', type=str, help='tuning from checkpoint') # 从检查点微调 parser.add_argument('-d', '--device', type=str, help='device',) # 设备,可选的 parser.add_argument('--seed', type=int, help='exp reproducibility') # 实验可重复性,可选的 parser.add_argument('--use-amp', action='store_true', help='auto mixed precision training') # 自动混合精度训练,可选的 parser.add_argument('--output-dir', type=str, help='output directoy') # 输出目录,可选的 parser.add_argument('--summary-dir', type=str, help='tensorboard summary') # 张量板,用于指定 TensorBoard 日志文件(summary 文件)的存储目录 parser.add_argument('--test-only', action='store_true', default=False,) # 仅测试,可选的 # priority 1 parser.add_argument('-u', '--update', nargs='+', help='update yaml config') # 更新yaml配置 # env parser.add_argument('--print-method', type=str, default='builtin', help='print method') # 打印方法,默认内置 parser.add_argument('--print-rank', type=int, default=0, help='print rank id') # 打印rank id,默认0 parser.add_argument('--local-rank', type=int, help='local rank id') # 本地rank id比如,想要在训练中断后继续原来的检查点训练,就可以增加指令:
--resume /checkpoints/check007.pth再如,想要在预训练模型的基础上微调,就增加指令:
-t deim_dfine_hgnetv2_n_coco_160e.pth # 权重文件位于项目的根目录或:
-t /ckpts/deim_dfine_hgnetv2_n_coco_160e.pth # 当权重文件不在根目录下,就指定目录
其中的deim_dfine_hgnetv2_n_coco_160e.pth是从项目网页中下载的预训练权重。
- 根据自己的实际情况修改上面的指令。
比如我本次训练用的指令:
CUDA_VISIBLE_DEVICES=0,1 torchrun --master_port=7777 --nproc_per_node=2 train.py -c configs/deim_dfine/deim_hgnetv2_s_coco.yml --use-amp --seed=0
这是Linux下的命令,如果在Windows下运行,需要把相应的指令根据Windows的格式需要改为:
set CUDA_VISIBLE_DEVICES=0,1 && torchrun --master_port=7777 --nproc_per_node=2 --rdzv_backend=c10d train.py -c configs/deim_dfine/deim_hgnetv2_s_coco.yml --use-amp --seed=0本次的Windows机器是单显卡的,要去掉指令中的有关分布式训练的指令,否则会报错,所以最终的实际运行指令是:
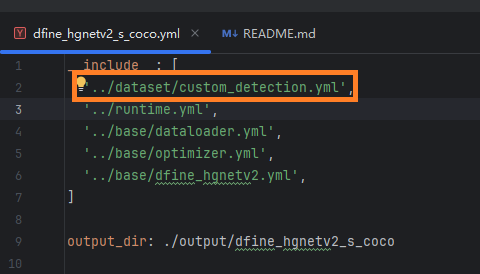
set CUDA_VISIBLE_DEVICES=0 && "C:\Users\DY\.conda\envs\deim\python.exe" train.py -c configs/deim_dfine/deim_hgnetv2_s_coco.yml --use-amp --seed=0需要注意的是,由于是使用了自定义数据集,所以还需要修改本次训练用的模型的配置,将它的调用yml文件指向自定义的yml:
把第一行的yml修改为custom_detection.yml:
在Windows下运行,会报错:
File "C:\Users\DY\.conda\envs\deim\Lib\site-packages\faster_coco_eval\core\coco.py", line 326, in load_json _data = json.load(io) ^^^^^^^^^^^^^ File "C:\Users\DY\.conda\envs\deim\Lib\json\__init__.py", line 293, in load return loads(fp.read(), ^^^^^^^^^ UnicodeDecodeError: 'gbk' codec can't decode byte 0xac in position 92490: illegal multibyte sequence
原因是COCO 数据集的标注文件均为 UTF-8 编码,而 Windows 系统默认文件编码为gbk,因此直接读取会导致解码错误。解决方法:
将C:\Users\DY\.conda\envs\deim\Lib\site-packages\faster_coco_eval\core\coco.py的第325行,
with open(json_file) as io: _data = json.load(io)改为:
with open(json_file, encoding="utf-8") as io:即可正常训练。
如果不使用预训练模型,首次训练会自动下载一个权重文件,需要科学网连接:
错漏之处,烦请指正!

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 12
12 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)