IROS2025随笔小记
本文摘要:文章涵盖多个技术领域概念解析,包括:(1) 训练Transformer语言模型(Train TLS)的定义;(2) 农业AI中专用芯片(如Jetson、Edge TPU等)相比CUDA在边缘推理的低功耗、实时性优势;(3) IEEE农业机器人技术委员会(AgRA-TC)的成员分级;(4) 传感器噪声(sensor noise)的定义与实例;(5) 遥操作(Teleoperation)的远
-
Train TLS
在机器学习 / 深度学习领域中
Train TLS 通常表示:
Train a Transformer-based Language System / Transformer Language Model / Text-Level System
即:“训练一个基于 Transformer 的语言模型(或系统)”。 -
在农业ai领域研究中 用芯片而不是cuda 有什么好处?
| 芯片平台 | 典型设备 | 特点 |
|---|---|---|
| NVIDIA Jetson Orin / Xavier | 智能农机、无人机 | CUDA兼容,推理强,功耗<30W |
| Google Coral Edge TPU | AI相机、传感节点 | TensorFlow Lite 支持,极低功耗 |
| 华为 Ascend 310 / Atlas 200DK | 工业边缘盒 | 支持MindSpore/TensorFlow |
| Hailo-8 / Hailo-15 | 多摄像头同步识别 | 高效CNN推理,<10W功耗 |
| Rockchip RK3588 | 国产AI边缘板卡 | 支持ONNX/TFLite,便宜易用 |
| 因此,农业AI的常见做法是: |
🌿 在农业AI中,用芯片代替CUDA的好处在于:
可离线运行、低功耗、高实时性、成本低、可直接部署到田间设备;
唯一不足是训练仍需GPU完成。
🔹 在GPU上训练(CUDA)
🔹 在芯片上推理(Edge AI)
-
IEEE Technical Committee on Agricultural Robotics and Automation (AgRA-TC)
IEEE农业机器人与自动化技术委员会
技术委员会(Technical Committee,简称 TC)
注册 IEEE RAS 会员
学生会员一年约 $30–40 美元。
| 级别 | 说明 | 条件 |
| ----------------------- | --------- | ----------------- |
| Member(普通成员) | 可以自由加入 | 填表 + 研究方向相关 |
| Active Member(活跃成员) | 参与会议/组织活动 | 投稿、做报告或协助workshop |
| Officer(委员/副主席等) | 由投票选出 | 通常是教授或高级研究员 | -
在机器人领域里常说的sensor noise是什么?
Sensor noise(传感器噪声) 指的是:
传感器在测量真实物理量时,不可避免地出现的随机误差或干扰信号。
简单说: 传感器读数 ≠ 真值,而是在真值基础上叠加了一些随机的扰动。
例如:一个激光雷达测到距离是 3.05 m,但真实距离是 3.00 m。
一个IMU陀螺仪测得角速度抖动,即使机器人静止。
这些抖动或偏差都属于“sensor noise”。 -
Teleoperation(遥操作)
来自前缀 “tele–”(远程的) + “operation”(操作)。
在机器人学中,它的意思是:人类通过通信链路远程控制机器人执行任务的过程。
你可以把 teleoperation 理解为:“人不在机器人旁边,而是通过网络、无线电、或其他通信方式,从远处控制机器人。”这是一种 人机协作控制方式,不同于完全自动化(autonomous)。
操作员仍然在“操控环”中,只是操控的指令通过网络发送给远方的机器人。 -
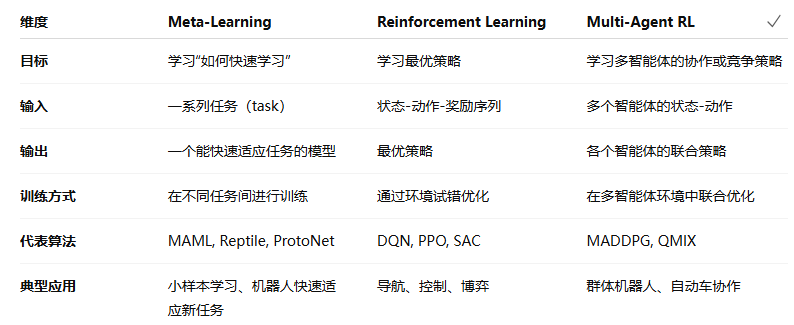
meta-learning是什么意思,和强化学习RL,muti-agent RL有什么区别.
-
“Reasoning model(推理模型)”和“Policy model(策略模型)有什么区别?
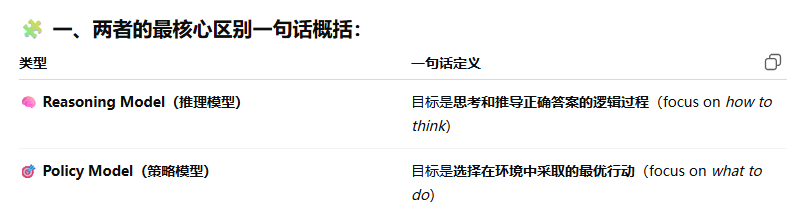
Input → Reasoning Process → Policy Decision → Output
Reasoning model:教AI“怎么想”
Policy model:教AI“怎么做”
未来的智能系统(例如农业机器人、通用AI)——都需要两者结合,既能“想明白”,又能“做得对”。 -
FM + CG Data是什么意思
CG Rendering(计算机图形渲染)
CG = Computer Graphics(计算机图形学)
CG Rendering = 将3D模型渲染成2D图像的过程。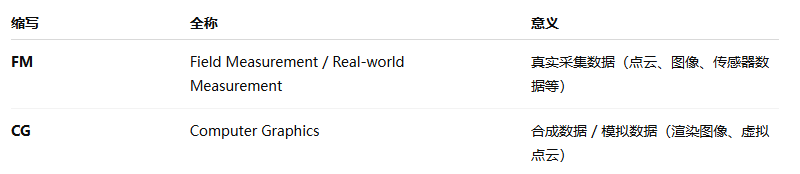

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 10
10 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)