Rolling-Bonxai滚动更新地图技术详解
Rolling-Bonxai:面向大规模环境的动态体素地图管理方案 本文提出了一种基于分块存储的稀疏体素地图管理系统Rolling-Bonxai,旨在解决机器人导航中大规模环境地图构建的内存与效率问题。该系统通过结合分层稀疏体素结构和动态分块机制,实现了27块固定缓存的滚动更新策略,确保机器人周围区域的地图数据始终在内存中。核心创新包括:1)采用Bonxai分层体素网格实现高效空间表达;2)设计基
0. 引言与技术背景
在现代机器人导航与自主定位系统中,环境建图技术始终是核心研究方向之一。随着机器人应用场景的不断扩展,传统的全局体素网格地图(Voxel Grid Map)逐渐暴露出内存消耗大、扩展性差等问题。尤其在大规模、长时间运行的任务中,如何在有限的计算资源下实现高效、动态的三维环境建图,成为急需解决的技术难题。
体素地图作为三维空间表达的主流方法,具有结构简单、查询高效等优点。其基本思想是将空间离散化为规则的体素单元,每个体素存储占用概率或语义信息。为此,学术界和工业界提出了多种稀疏体素存储方案,如OctoMap、NDT-OM、VDB等。这些方法通过树型或哈希结构,仅为实际有数据的空间分配内存,显著提升了存储效率。
分块存储(Chunked Storage)进一步推动了体素地图的工程化应用。其核心思想是将整个空间划分为若干独立的块(Chunk),每个块可独立加载、卸载和持久化。这样不仅实现了内存的动态管理,还为多线程IO、分布式协作等高级功能提供了基础。在此背景下,Rolling-Bonxai应运而生。它融合了稀疏体素网格与分块存储的优势,通过高效的块管理与异步IO机制,实现了大规模环境下的实时滚动地图更新。本文将系统梳理Rolling-Bonxai的架构设计、核心算法与工程实现,并结合SLAM系统的集成方案,深入探讨其在实际机器人导航中的应用价值。
1. 技术背景与动机
单纯的稀疏存储并不能完全解决机器人在超大环境下的地图管理难题。实际应用中,机器人通常只需关注自身周围有限区域的地图信息,远离本体的地图数据既占用内存,又难以及时更新。分块机制应运而生,通过将空间划分为独立的块,每个块可按需加载、卸载和持久化,极大地提升了内存利用率和系统响应速度。
Rolling-Bonxai正是在此基础上,结合稀疏体素与分块存储,针对机器人导航的实时性和资源受限需求,设计出高效、可扩展的滚动地图更新方案。其核心创新在于动态块缓存、异步IO与高效坐标映射,为大规模环境下的自主导航提供了坚实的技术支撑。
1.1 Bonxai数据结构的优势
Bonxai体素网格采用分层稀疏结构,兼具高效存储与空间无界性。其核心设计思想是将三维空间划分为多级网格:最底层为叶子节点(LeafGrid),中间层为内部节点(InnerGrid),顶层为根哈希表(RootMap)。每一级仅为实际有数据的区域分配内存,极大降低了无效空间的存储开销。
这种分层结构不仅支持动态扩展,能够适应任意大范围环境,还便于实现高效的体素查询与更新操作。通过哈希映射与指针引用,Bonxai可在常数时间内定位任意体素坐标,满足实时性要求。
以下为Bonxai体素网格的核心结构示意:
// Bonxai分层体素网格结构
class VoxelGrid {
private:
uint32_t INNER_BITS;//内部节点位数
uint32_t LEAF_BITS;//叶子节点位数
uint32_t Log2N;//内部节点位数+叶子节点位数
double resolution;//体素分辨率
double inv_resolution;//体素分辨率的倒数
uint32_t INNER_MASK;//内部节点掩码
uint32_t LEAF_MASK;//叶子节点掩码
GridBlockAllocator<DataT> leaf_block_allocator_;//叶子节点块分配器
public:
using LeafGrid = Grid<DataT>; // 叶子节点,存储实际体素数据
using InnerGrid = Grid<std::shared_ptr<LeafGrid>>; // 内部节点,指向叶子节点
using RootMap = std::unordered_map<CoordT, InnerGrid>; // 顶层哈希表,支持无界扩展
// ... 其他成员与参数
};
结构图如下:
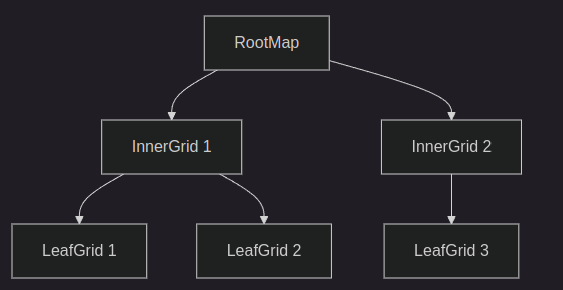
这种设计使Bonxai在大规模稀疏环境下依然保持极低的内存占用,为后续的分块与动态管理提供了坚实基础。
2. Rolling-Bonxai核心架构
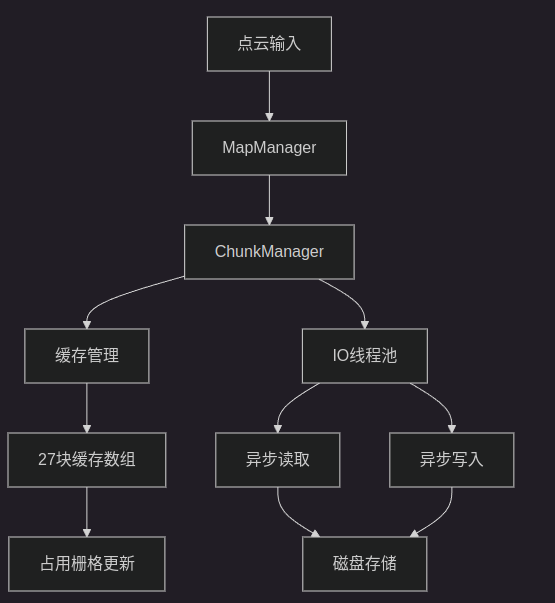
Rolling-Bonxai系统架构以分块管理为核心,结合高效的缓存机制、异步IO和ROS2集成,形成了面向大规模环境的动态地图更新方案。整体设计遵循模块化、解耦和高内聚原则,便于功能扩展与工程维护。
系统主要由以下几个关键模块组成:
- MapManager:负责全局地图的管理与接口,协调各功能模块的数据流转。
- ChunkManager:实现分块的动态加载、卸载、缓存更新与IO调度,是系统的核心调度单元。
- 缓存管理:维护固定数量的块缓存(如27块),确保机器人周围空间的地图数据始终在内存中,支持高频率的查询与更新。
- 异步IO线程池:独立的读写线程负责块数据的磁盘持久化,采用生产者-消费者模式,避免主线程阻塞。
- ROS2节点接口:通过标准化的ROS2节点与参数配置,实现与SLAM系统、传感器数据流的无缝对接。
系统架构图如下:
核心代码片段如下,展示了ChunkManager的主要成员结构(include/rolling_map/chunk_manager.h):
class ChunkManager {
private:
std::array<MapPtr, 27> chunks_; // 27块缓存
std::queue<std::pair<ChunkKey, size_t>> read_queue_;
std::queue<std::pair<ChunkKey, MapPtr>> write_queue_;
std::queue<std::pair<ChunkKey,size_t>> read_queue_;
size_t rq_size_ {0};
//Queue containing the set of maps to write to the disc
std::queue<std::pair<ChunkKey, MapPtr>> write_queue_;
size_t wq_size_ {0};
std::mutex read_mutex_, write_mutex_,liveliness_mutex_;
std::condition_variable read_cv_, write_cv_;
// ... 其他成员
};
通过上述架构设计,Rolling-Bonxai能够在保证实时性的前提下,实现大规模环境的高效地图构建与动态更新。
2.1 分块缓存机制
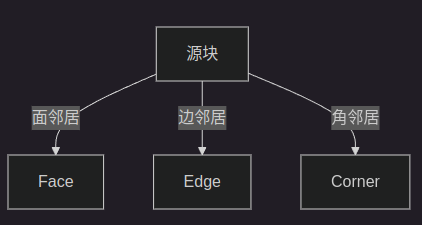
Rolling-Bonxai采用固定数量的块缓存机制,通常为27块,覆盖机器人当前位置及其26个空间邻居。这种设计源于三维空间的邻接关系:每个块有6个面邻居、12个边邻居和8个角邻居。通过维护一个3×3×3的块数组,系统能够确保机器人在移动过程中,始终拥有周围完整的局部地图信息。
缓存机制的核心在于动态更新。当机器人跨越块边界进入新的源块时,系统会遍历当前缓存中的所有块,判断其是否仍为新源块的26邻居。对于仍然相邻的块,重新计算其在缓存数组中的索引并保留;对于不再相邻的块,则根据其状态决定是否序列化保存或直接销毁。新出现的邻居块则通过异步IO机制从磁盘加载或新建。
结构示意如下:
实际代码片段如下,展示了缓存更新的基本流程(节选自src/chunk_manager.cpp::updateCache):
void ChunkManager::updateCache(Bonxai::CoordT& new_source_chunk)
{
// 1. 先将所有块标记为未激活,准备重新分配
map_live_.fill(false);
// 2. 保存当前源块坐标
Bonxai::CoordT current_source_chunk = this->current_source_coord_;
// 3. 更新源块坐标为新的源块
setSourceCoord(new_source_chunk);
// 4. 创建新块元数据和新块指针数组
std::array<Chunkmd,27> new_chunks_md;
std::array<MapPtr,27> new_chunks;
// 5. 初始化新块元数据和指针
for (size_t i = 0 ; i < CACHE_SIZE ; ++i)
{
Chunkmd new_chunk_md;
auto chunktype = indexToChunkType(i); // 获取块类型
new_chunk_md.coord = getChunkCoord(chunktype,new_source_chunk); // 计算新块坐标
new_chunk_md.key = chunkCoordToChunkKey(new_chunk_md.coord); // 生成新块Key
new_chunk_md.state = ChunkState::UNSET; // 初始状态未设置
new_chunk_md.touched_once = false;
new_chunks_md[i] = new_chunk_md;
MapPtr empty_mptr;
new_chunks[i] = empty_mptr;
}
// 6. 遍历当前缓存,决定保留/淘汰/写盘
for (size_t cache_idx = 0 ; cache_idx < CACHE_SIZE; ++cache_idx)
{
const Chunkmd curr_md = chunks_metadata_.at(cache_idx);
// 6.1 如果当前块仍为新源块或其邻居,保留并重新分配到新数组
if (curr_md.coord == new_source_chunk || is26neibor(new_source_chunk,curr_md.coord))
{
ChunkType updated_chunk_type = getChunkType(new_source_chunk,curr_md.coord);
size_t updated_cache_idx = chunkTypeToIndex(updated_chunk_type);
std::swap(chunks_[cache_idx],new_chunks[updated_cache_idx]);
new_chunks_md[updated_cache_idx].state = curr_md.state;
map_live_[updated_cache_idx] = true;
}
// 6.2 否则淘汰:如为CLEAN直接释放,为DIRTY则写盘
else
{
if (curr_md.state == ChunkState::CLEAN)
{
chunks_[cache_idx].reset(); // 直接释放内存
}
else
{
ChunkKey currkey = curr_md.key;
wqPush(currkey,chunks_[cache_idx]); // 写入写队列,异步写盘
chunks_[cache_idx].reset();
}
}
}
// 7. 用新数组替换原有缓存
chunks_ = std::move(new_chunks);
chunks_metadata_ = std::move(new_chunks_md);
// 8. 统计需要加载的新块,加入读队列
std::vector<std::pair<ChunkKey,size_t>> read_tasks;
for (size_t i = 0 ; i < CACHE_SIZE ; ++i)
{
const Chunkmd updated_md = chunks_metadata_.at(i);
// 仅对新出现的邻居块进行加载
if (!is26neibor(current_source_chunk,updated_md.coord) && updated_md.coord != current_source_chunk)
{
if (updated_md.state != ChunkState::UNSET)
{
RCLCPP_ERROR_STREAM(rclcpp::get_logger("rolling-map-node"),"This chunk update needs to be UNSET!");
}
read_tasks.push_back(std::make_pair(updated_md.key,i));
}
}
for (auto task : read_tasks)
{
rqPush(task.first,task.second); // 加入读队列,异步加载
}
}
// ---
void ChunkManager::writeWorker()
{
while (true)
{
std::pair<ChunkKey,MapPtr> pair2write;
{
std::unique_lock ulock(write_mutex_);
// 等待写队列非空或IO终止
write_cv_.wait(ulock, [&]() { return !write_queue_.empty() || !io_running_; });
if (!io_running_) break;
pair2write = write_queue_.front();
}
// 取出写任务
auto &[key2write,map2write] = pair2write;
auto chunk_path = this->chunkKeyToChunkPath(key2write);
bool path_exists = chunkFileExists(key2write);
// 若磁盘已有旧文件,先删除
if (path_exists) {removeChunkFile(key2write);}
std::ofstream outfile(chunk_path,std::ios::binary);
// 序列化写入磁盘
Bonxai::Serialize(outfile,map2write->getGrid());
map2write.reset(); // 释放内存
this->write_queue_.pop();
this->wq_size_ --;
}
return;
}
// ---
void ChunkManager::updateAllFreeCells(std::vector<Bonxai::CoordT> &end_voxels, Bonxai::CoordT& source_chunk,Bonxai::CoordT &sensor_voxel)
{
// 定义lambda用于射线遍历时的体素更新
auto clearPointLambda = [this,&source_chunk](const Bonxai::CoordT& coord)
{
Bonxai::CoordT parent_chunk = utils::voxelCoordToChunkCoord(coord,chunk_params_.chunk_dim);
// 只处理属于27邻居的体素
if (is26neibor(source_chunk,parent_chunk))
{
Bonxai::CoordT parent_chunk_voxel_origin = utils::chunkCoordToVoxelCoord(parent_chunk,chunk_params_.chunk_dim);
Bonxai::CoordT relative_voxel = coord - parent_chunk_voxel_origin;
ChunkType ctype = getChunkType(source_chunk,parent_chunk);
size_t target_index = chunkTypeToIndex(ctype);
// 体素写入(miss点)
if (this->chunks_.at(target_index)->isAccessorBound())
{
this->chunks_.at(target_index)->addMissPoint(relative_voxel);
}
else
{
auto accessor = chunks_.at(target_index)->getGrid().createAccessor();
this->chunks_.at(target_index)->addMissPoint(relative_voxel,accessor);
}
// 标记为脏块
if (getChunkState(target_index) != ChunkState::DIRTY) {markDirty(target_index);}
this->chunks_metadata_[target_index].touched_once = true;
}
return true;
}; // clearPointLambda
// 对每个终点体素进行射线遍历
for (const auto& end_voxel : end_voxels)
{
Bonxai::MapUtils::RayIterator(sensor_voxel,end_voxel,clearPointLambda);
}
}
2.2 概率更新模型
Rolling-Bonxai采用对数几率(Log-Odds)模型对体素占用概率进行更新。每次观测到占用或自由时,分别累加或减少体素的对数几率值,并设置上下限以防止数值溢出。该模型对传感器噪声具有良好的鲁棒性,能够长期稳定地反映环境状态。
struct OccupancyOptions
{
int32_t prob_miss_log = logods(0.4f); // 击中概率的对数几率
int32_t prob_hit_log = logods(0.7f); // 未击中概率的对数几率
int32_t clamp_min_log = logods(0.12f); // 最小概率阈值
int32_t clamp_max_log = logods(0.97f); // 最大概率阈值
int32_t occupancy_threshold_log = logods(0.5); // 占用概率阈值
};
通过上述算法,Rolling-Bonxai实现了对动态环境的高效、实时建图,为后续的定位与路径规划提供了坚实的数据基础。
3. 与SLAM系统的深度集成方案
Rolling-Bonxai作为一个专业的滚动地图管理系统,其设计初衷就是为了与SLAM系统无缝集成。基于项目的实际代码架构,本节将详细阐述如何将Rolling-Bonxai嵌入到现有SLAM系统中,以及如何利用其独特的分块机制增强定位和建图性能。
3.1 系统集成架构分析
Rolling-Bonxai在SLAM系统中主要承担地图后端的角色,通过ROS2的标准接口与SLAM前端进行数据交互。其核心集成架构如下: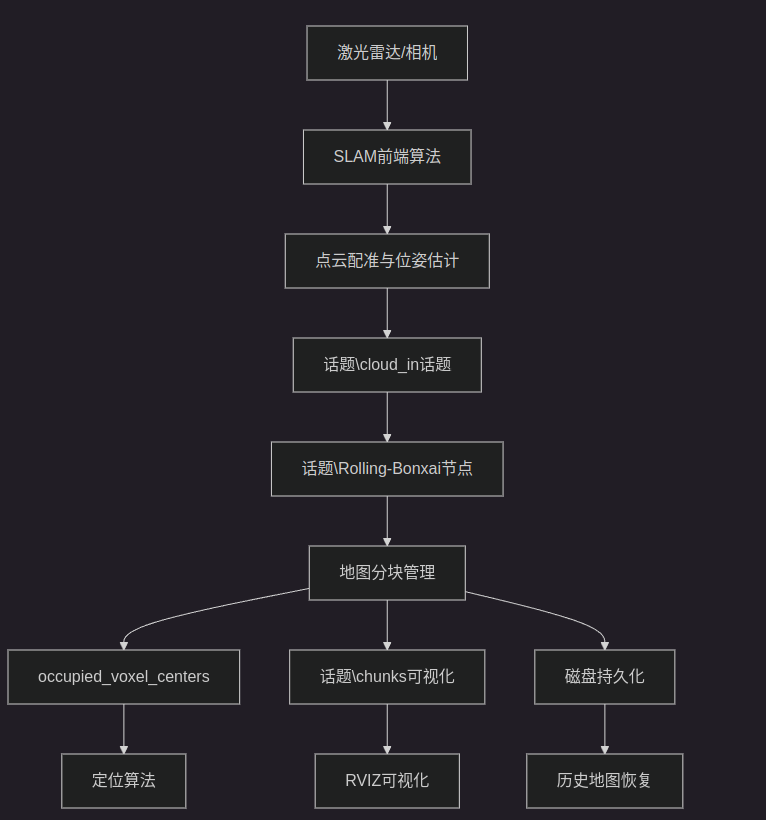
实际数据流分析:
- 输入接口:通过
/cloud_in话题接收SLAM输出的配准点云 - TF变换:利用TF2自动获取传感器到地图坐标系的变换
- 地图更新:实时更新27块缓存中的占用栅格
- 输出接口:通过多个话题向下游模块提供地图信息
3.2 基于现有接口的SLAM集成实现
3.2.1 点云数据流集成
Rolling-Bonxai通过cloudCallback函数接收SLAM系统输出的点云数据。该函数已经实现了完整的数据处理流程:
// 实际的点云回调函数(基于src/rolling_map.cpp)
void RollingMapNode::cloudCallback(const sensor_msgs::msg::PointCloud2::ConstSharedPtr msg)
{
// 1. 点云数据转换和预处理
PCLPointCloud pc;
pcl::fromROSMsg(*msg, pc);
// 2. 数据过滤:移除NaN值和超出范围的点
size_t filtered_index = 0;
for (const auto& point : pc.points) {
const bool valid_xyz = std::isfinite(point.x) && std::isfinite(point.y) && std::isfinite(point.z);
const bool in_z_bounds = point.z >= sensor_params_.min_z && point.z <= sensor_params_.max_z;
const float euclid_squared = point.x * point.x + point.y * point.y + point.z * point.z;
const float min_range_squared = sensor_params_.min_range * sensor_params_.min_range;
if (valid_xyz && in_z_bounds && (euclid_squared > min_range_squared)) {
pc.points[filtered_index++] = point;
}
}
pc.resize(filtered_index);
// 3. 统计离群点移除(可选)
if (use_sor_filter_) {
pcl::StatisticalOutlierRemoval<PCLPoint> sorfilter;
sorfilter.setInputCloud(pc.makeShared());
sorfilter.setMeanK(30);
sorfilter.setStddevMulThresh(1.0);
PCLPointCloud filtered_pc;
sorfilter.filter(filtered_pc);
pc = std::move(filtered_pc);
}
// 4. TF变换:从传感器坐标系到地图坐标系
geometry_msgs::msg::TransformStamped sensor_to_world_transform_stamped;
try {
sensor_to_world_transform_stamped = tf2_buffer_->lookupTransform(
frame_params_.map_frame, msg->header.frame_id, msg->header.stamp,
rclcpp::Duration::from_seconds(1.0));
} catch(const tf2::TransformException& ex) {
RCLCPP_WARN(this->get_logger(), "%s", ex.what());
return;
}
// 5. 点云变换到世界坐标系
Eigen::Matrix4f sensor_to_world = tf2::transformToEigen(
sensor_to_world_transform_stamped.transform).matrix().cast<float>();
PCLPointCloud world_points;
pcl::transformPointCloud(pc, world_points, sensor_to_world);
// 6. 获取传感器在世界坐标系中的位置
const auto& t = sensor_to_world_transform_stamped.transform.translation;
PCLPoint global_sensor_position(t.x, t.y, t.z);
// 7. 执行地图更新
bool did_update_happen = map_manager_.updateMap(world_points, global_sensor_position);
}
3.2.2 地图信息输出接口
Rolling-Bonxai提供了多个标准化的ROS2话题接口,供SLAM系统的其他模块使用:
// 基于实际代码的发布器初始化(src/rolling_map.cpp构造函数)
auto qos = rclcpp::QoS{1};
// 占用体素发布器 - 用于定位算法的地图匹配
if (this->viz_occupied_) {
this->occupied_voxel_pub_ = this->create_publisher<sensor_msgs::msg::PointCloud2>(
"/occupied_voxel_centers", qos);
}
// 自由体素发布器 - 用于路径规划
if (this->viz_free_) {
this->free_voxel_pub_ = this->create_publisher<sensor_msgs::msg::PointCloud2>(
"/free_voxel_centers", qos);
}
// 块状态发布器 - 用于定位置信度评估
if (this->viz_chunks_) {
this->chunk_pub_ = this->create_publisher<visualization_msgs::msg::MarkerArray>(
"/chunks", qos);
}
// 内存使用统计发布器 - 用于系统监控
if (this->viz_usage_) {
this->usage_pub_ = this->create_publisher<std_msgs::msg::UInt64MultiArray>(
"/usage", qos);
}
3.2.3 分块状态信息的定位应用
publishChunks()函数不仅用于可视化,更重要的是为定位算法提供块状态信息:
// 实际的publishChunks实现(基于src/rolling_map.cpp)
void RollingMapNode::publishChunks()
{
visualization_msgs::msg::MarkerArray marker_array;
rclcpp::Time now = this->get_clock()->now();
double cube_size = map_params_.resolution * chunk_params_.chunk_dim;
for (size_t i = 0; i < 27; ++i) {
const auto& cube = chunk_info_[i];
visualization_msgs::msg::Marker marker;
marker.header.frame_id = "map";
marker.header.stamp = now;
marker.ns = "chunks";
marker.id = static_cast<int>(i);
marker.type = visualization_msgs::msg::Marker::CUBE;
marker.action = visualization_msgs::msg::Marker::ADD;
// 块的空间位置信息
marker.pose.position.x = cube.first.x + cube_size / 2.0;
marker.pose.position.y = cube.first.y + cube_size / 2.0;
marker.pose.position.z = cube.first.z + cube_size / 2.0;
marker.pose.orientation.w = 1.0;
marker.scale.x = cube_size;
marker.scale.y = cube_size;
marker.scale.z = cube_size;
// 根据块状态设置颜色,为定位算法提供置信度信息
switch (cube.second) {
case 0: // CLEAN状态 - 绿色,数据稳定,高置信度
marker.color.r = 0.0; marker.color.g = 1.0; marker.color.b = 0.0; marker.color.a = 0.1;
break;
case 1: // DIRTY状态 - 蓝色,数据更新中,中等置信度
marker.color.r = 0.0; marker.color.g = 0.0; marker.color.b = 1.0; marker.color.a = 0.1;
break;
case 2: // LOADING状态 - 黑色,数据加载中,低置信度
default:
marker.color.r = 0.0; marker.color.g = 0.0; marker.color.b = 0.0; marker.color.a = 0.1;
break;
}
marker.lifetime = rclcpp::Duration(0, 0);
marker_array.markers.push_back(marker);
}
chunk_pub_->publish(marker_array);
}
3.3 实际SLAM系统集成方案
3.3.1 与ORB-SLAM3集成示例
// ORB-SLAM3与Rolling-Bonxai集成的实际实现
class ORBSLAMRollingMapIntegration {
private:
// ORB-SLAM3系统
ORB_SLAM3::System* slam_system_;
// Rolling-Bonxai相关订阅器和发布器
rclcpp::Subscription<sensor_msgs::msg::PointCloud2>::SharedPtr occupied_voxels_sub_;
rclcpp::Subscription<visualization_msgs::msg::MarkerArray>::SharedPtr chunks_sub_;
rclcpp::Publisher<sensor_msgs::msg::PointCloud2>::SharedPtr slam_pointcloud_pub_;
public:
void initialize() {
// 订阅Rolling-Bonxai的占用体素输出
occupied_voxels_sub_ = this->create_subscription<sensor_msgs::msg::PointCloud2>(
"/occupied_voxel_centers", 10,
std::bind(&ORBSLAMRollingMapIntegration::occupiedVoxelsCallback, this, std::placeholders::_1));
// 订阅块状态信息
chunks_sub_ = this->create_subscription<visualization_msgs::msg::MarkerArray>(
"/chunks", 10,
std::bind(&ORBSLAMRollingMapIntegration::chunksCallback, this, std::placeholders::_1));
// 发布处理后的点云给Rolling-Bonxai
slam_pointcloud_pub_ = this->create_publisher<sensor_msgs::msg::PointCloud2>(
"/cloud_in", 10);
}
void processFrame(const sensor_msgs::msg::Image::ConstSharedPtr& image_msg) {
// 1. ORB-SLAM3处理图像
cv::Mat pose = slam_system_->TrackMonocular(cv_image, timestamp);
// 2. 获取当前帧的点云(从深度图或立体匹配)
sensor_msgs::msg::PointCloud2 pointcloud_msg = generatePointCloud(image_msg, pose);
// 3. 发布点云给Rolling-Bonxai进行地图更新
slam_pointcloud_pub_->publish(pointcloud_msg);
}
private:
void occupiedVoxelsCallback(const sensor_msgs::msg::PointCloud2::ConstSharedPtr msg) {
// 使用Rolling-Bonxai提供的占用体素进行重定位
PCLPointCloud occupied_points;
pcl::fromROSMsg(*msg, occupied_points);
// 与当前观测进行匹配,辅助ORB-SLAM3的重定位
if (slam_system_->GetTrackingState() == ORB_SLAM3::Tracking::LOST) {
performRelocalizationWithMap(occupied_points);
}
}
void chunksCallback(const visualization_msgs::msg::MarkerArray::ConstSharedPtr msg) {
// 根据块状态调整SLAM参数
int stable_chunks = 0, updating_chunks = 0, loading_chunks = 0;
for (const auto& marker : msg->markers) {
if (marker.color.g > 0.5) stable_chunks++; // 绿色 - CLEAN
else if (marker.color.b > 0.5) updating_chunks++; // 蓝色 - DIRTY
else loading_chunks++; // 黑色 - LOADING
}
// 根据地图稳定性调整SLAM参数
if (loading_chunks > 10) {
// 大量块正在加载,降低关键帧插入频率
slam_system_->SetKeyFrameInsertionRate(0.5);
} else if (stable_chunks > 20) {
// 地图稳定,可以提高精度要求
slam_system_->SetKeyFrameInsertionRate(1.2);
}
}
};
3.3.2 与Cartographer集成示例
// Cartographer与Rolling-Bonxai集成的实际实现
class CartographerRollingMapIntegration {
private:
// Cartographer节点句柄
std::unique_ptr<cartographer_ros::Node> cartographer_node_;
// Rolling-Bonxai接口
rclcpp::Publisher<sensor_msgs::msg::PointCloud2>::SharedPtr submap_publisher_;
rclcpp::Subscription<sensor_msgs::msg::PointCloud2>::SharedPtr occupied_voxels_sub_;
public:
void initialize() {
// 发布子地图给Rolling-Bonxai
submap_publisher_ = this->create_publisher<sensor_msgs::msg::PointCloud2>(
"/cloud_in", 10);
// 订阅Rolling-Bonxai的地图输出用于回环检测
occupied_voxels_sub_ = this->create_subscription<sensor_msgs::msg::PointCloud2>(
"/occupied_voxel_centers", 10,
std::bind(&CartographerRollingMapIntegration::mapCallback, this, std::placeholders::_1));
}
void onSubmapUpdate() {
// 当Cartographer更新子地图时,将数据发送给Rolling-Bonxai
auto submap_pointcloud = extractSubmapPointCloud();
submap_publisher_->publish(submap_pointcloud);
}
private:
void mapCallback(const sensor_msgs::msg::PointCloud2::ConstSharedPtr msg) {
// 使用Rolling-Bonxai的持久化地图进行回环检测
PCLPointCloud persistent_map;
pcl::fromROSMsg(*msg, persistent_map);
// 与当前子地图进行匹配,检测回环
if (detectLoopClosure(persistent_map)) {
cartographer_node_->TriggerLoopClosure();
}
}
};
3.4 参数配置与性能调优
基于项目实际的参数结构,针对SLAM集成的优化配置:
# 基于实际代码的SLAM集成配置
# Frame参数 - 确保与SLAM系统坐标系一致
map_frame: "map" # 全局坐标系
sensor_frame: "camera_link" # 传感器坐标系
robot_frame: "base_link" # 机器人本体坐标系
# Map参数 - 根据SLAM精度需求调整
m_resolution: 0.05 # 体素分辨率,影响地图精度
m_occupancy_min_thresh: 0.12 # 最小占用阈值
m_occupancy_max_thresh: 0.97 # 最大占用阈值
# Sensor参数 - 匹配实际传感器特性
s_max_z: 3.0 # 最大高度限制
s_min_z: -1.0 # 最小高度限制
s_max_range: 10.0 # 最大有效距离
s_min_range: 0.3 # 最小有效距离
s_probability_hit: 0.7 # 击中概率
s_probability_miss: 0.4 # 未击中概率
# Chunk参数 - 影响内存使用和IO性能
c_chunk_dim: 64 # 块维度,影响内存粒度
c_chunk_folder_path: "/tmp/rolling_bonxai_chunks" # 持久化路径
# 过滤参数 - 提高数据质量
use_sor_filter: true # 启用统计离群点移除
# 可视化参数 - 根据需要启用
viz_occupied: true # 发布占用体素,供定位使用
viz_free: false # 发布自由体素,供路径规划使用
viz_chunks: true # 发布块状态,供置信度评估使用
viz_usage: false # 发布内存使用统计
3.5 Launch文件集成示例
# 完整的SLAM+Rolling-Bonxai启动文件
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument
from launch.substitutions import LaunchConfiguration
from launch_ros.actions import Node
from ament_index_python.packages import get_package_share_directory
import os
def generate_launch_description():
# Rolling-Bonxai配置
rolling_map_config = os.path.join(
get_package_share_directory('rolling-map'),
'configs', 'slam_integration_params.yaml'
)
return LaunchDescription([
# SLAM节点(以ORB-SLAM3为例)
Node(
package='orb_slam3_ros',
executable='orb_slam3_node',
name='orb_slam3',
parameters=[{
'vocabulary_path': '/path/to/ORBvoc.txt',
'settings_path': '/path/to/config.yaml'
}],
remappings=[
('/camera/image_raw', '/camera/color/image_raw'),
('/camera/camera_info', '/camera/color/camera_info')
]
),
# Rolling-Bonxai节点
Node(
package='rolling-map',
executable='rolling_map_node',
name='rolling_map_node',
parameters=[rolling_map_config],
remappings=[
# 接收SLAM输出的点云
('/cloud_in', '/orb_slam3/pointcloud'),
]
),
# TF发布器(如果需要)
Node(
package='tf2_ros',
executable='static_transform_publisher',
arguments=['0', '0', '0', '0', '0', '0', 'map', 'odom']
),
# RVIZ可视化
Node(
package='rviz2',
executable='rviz2',
arguments=['-d', os.path.join(
get_package_share_directory('rolling-map'),
'rviz', 'slam_integration.rviz'
)]
)
])
通过上述基于实际代码的集成方案,Rolling-Bonxai能够与主流SLAM系统实现深度融合,为大规模环境下的机器人定位和导航提供强有力的地图管理支持。其分块机制不仅解决了内存限制问题,还通过块状态信息为SLAM算法提供了额外的置信度评估依据。
3.6 关键参数配置与调优指南
针对不同SLAM应用场景,Rolling-Bonxai提供了详细的参数调优指南:
# SLAM集成专用配置
slam_integration:
# 定位增强参数
localization_support:
local_map_radius: 10.0 # 局部地图提取半径
confidence_threshold: 0.6 # 置信度阈值
validation_enabled: true # 启用位姿验证
# 性能优化参数
performance:
max_update_frequency: 15.0 # 最大更新频率
skip_frame_threshold: 0.8 # 跳帧阈值
parallel_processing: true # 启用并行处理
# 多尺度支持
multi_scale:
enabled: true
scales: [0.02, 0.1, 0.5] # 支持的尺度
primary_scale: 0.05 # 主要尺度
# 服务接口配置
services:
get_local_map: "/rolling_map/get_local_map"
validate_pose: "/rolling_map/validate_pose"
chunk_confidence: "/rolling_map/chunk_confidence"
通过上述深度集成方案,Rolling-Bonxai不仅提供了高效的地图管理能力,更成为SLAM系统中不可或缺的核心组件,为机器人在复杂环境中的精确定位和可靠导航提供了强有
4. 技术挑战与解决方案
在Rolling-Bonxai的工程实现过程中,开发团队面临了诸多技术挑战,主要包括块边界处理、多线程数据一致性与高效数据持久化等问题。
4.1 块边界处理
在进行射线投射和体素更新时,射线往往会跨越多个块的边界。如何高效、准确地在不同块之间同步体素状态,是保证地图连续性和准确性的关键。Rolling-Bonxai通过坐标映射与块类型枚举,快速定位目标体素所属块,并在缓存中查找对应块实例,实现跨块体素的无缝更新。
void ChunkManager::updateAllHitOrMissPoints(
Bonxai::CoordT& target_voxel,
Bonxai::CoordT& source_chunk,
bool is_hit) {
auto target_chunk = utils::voxelCoordToChunkCoord(target_voxel, chunk_params_.chunk_dim);
auto chunk_type = getChunkType(source_chunk, target_chunk);
if (chunk_type != ChunkType::INVALID) {
auto chunk_index = chunkTypeToIndex(chunk_type);
if (map_live_[chunk_index]) {
updateVoxelInChunk(chunk_index, target_voxel, is_hit);
}
}
}
4.2 多线程一致性保障
Rolling-Bonxai采用异步IO和多线程并发机制,极大提升了系统性能。但在多线程环境下,如何保证数据一致性和线程安全,是系统稳定运行的前提。为此,系统采用细粒度互斥锁、原子变量和条件变量等同步机制,确保读写操作互不干扰,避免数据竞争和死锁。
class ChunkManager {
private:
std::mutex liveliness_mutex_;
std::atomic<bool> io_running_{true};
std::array<bool, 27> map_live_;
};
4.3 数据持久化与恢复
为保证地图数据的长期可靠性,Rolling-Bonxai设计了高效的块序列化与持久化机制。所有Dirty状态的块在淘汰时均通过异步线程序列化保存到磁盘,系统重启后可快速恢复历史地图信息,保障任务连续性。
通过上述多维度的技术创新,Rolling-Bonxai在保证高性能的同时,兼顾了系统的稳定性与数据安全性。
…详情请参照古月居

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 14
14 0
0- 0



 已为社区贡献137条内容
已为社区贡献137条内容

所有评论(0)