本质矩阵和基础矩阵
前面的相机矩阵,是针对单个相机的,可我们知道单个相机图片并不能告诉我们物体的深度信息,这时至少需要两个相机,这样在两视图间内在的射影几何关系就是对极几何,而基本矩阵就算对极几何的代数表示。1.对极几何如果仅看一个相机,我们并不能知道深度信息,可如果有两个相机的话(就像人有两只眼睛)我们就能得到深度的信息,上图O和O'是两个相机中心,P点是物体所在,如果我们只看左边图像上的点p,我们不能知道物体到底
前面的相机矩阵,是针对单个相机的,可我们知道单个相机图片并不能告诉我们物体的深度信息,这时至少需要两个相机,这样在两视图间内在的射影几何关系就是对极几何,而基本矩阵就算对极几何的代数表示。
1.对极几何
如果仅看一个相机,我们并不能知道深度信息,可如果有两个相机的话(就像人有两只眼睛)我们就能得到深度的信息,
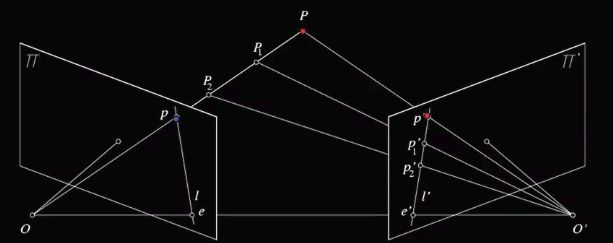
上图O和O'是两个相机中心,P点是物体所在,如果我们只看左边图像 上的点p,我们不能知道物体到底是在哪,点P1、P2或其他地方,可有了右边图像
上的
我们就能得到物体点P
在上图,我们把两相机中心的连线OO'成为基线,把他们与观测物体的平面OO'P成为对极平面,对极平面与两相机图像的交线l和l'称为对极线,而OO'与两图像的交点e,e'就是对极点。
随着观测点P的上下移动,对极平面也会围绕基线旋转
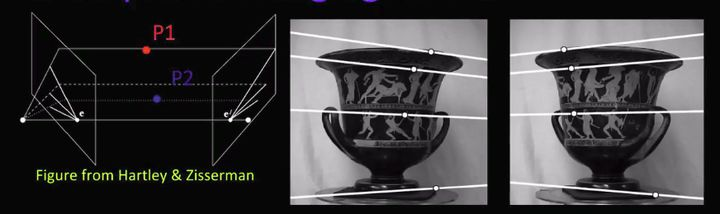
我们可以看到在左图对极平面旋转时对极点是不变的,而在相机图像上所有对极线都会交于对极点,这个对极点就是另一个相机中心在其图像上的像,当然正如右图所示,对极点可以在图像外。
2.本质矩阵和基础矩阵
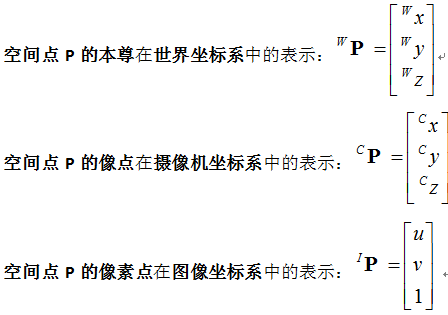
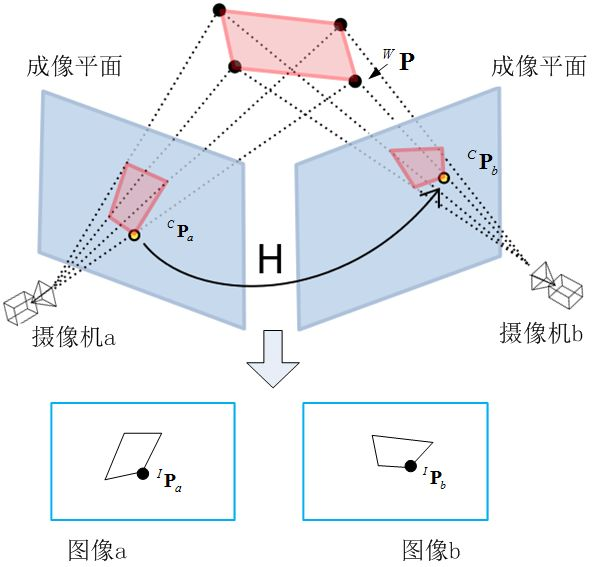
(1)不同人眼中的哈姆雷特——点P及其副本在不同坐标系下的表示
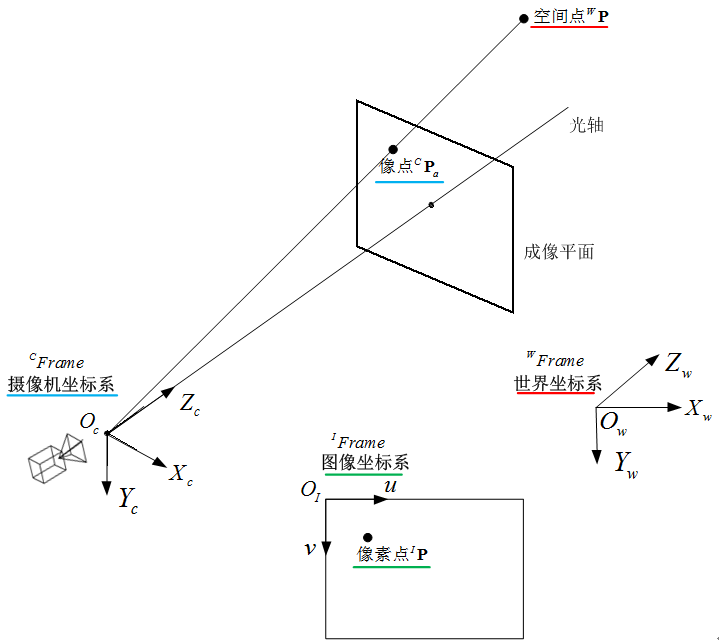
(2)横看成岭侧成峰——多个角度看点P
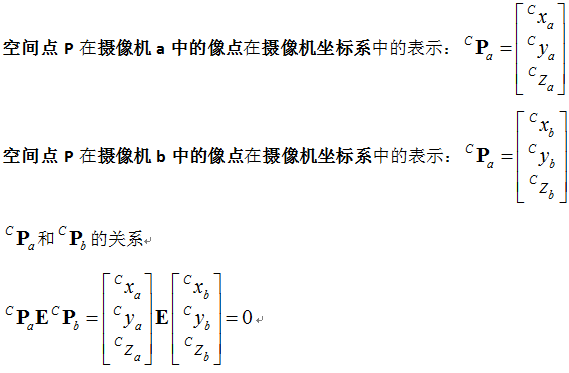
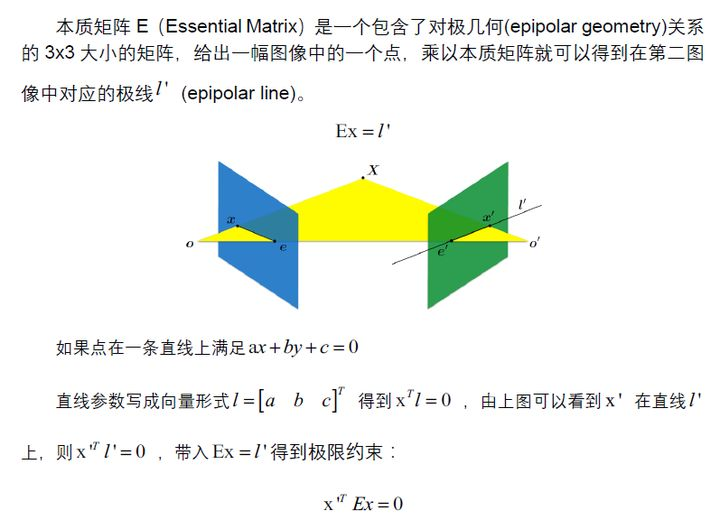
本质矩阵E(Essential Matrix):反映【空间一点P的像点】在【不同视角摄像机】下【摄像机坐标系】中的表示之间的关系。
3.本质矩阵、基础矩阵的推导
第一步:
第二步:
第三步:
4.另一种表述
原文链接1:https://zhuanlan.zhihu.com/p/33458436
原文链接2:https://www.zhihu.com/question/27581884
可参考文章:1:https://blog.csdn.net/xjtuse123/article/details/90312056
可参考文章2:https://www.cnblogs.com/youzx/p/6385513.html#wiz_toc_9

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 13
13 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)