零基础入门深度学习(6) - 长短时记忆网络(LSTM)
零基础入门深度学习(6) - 长短时记忆网络(LSTM)
文献内容来自:https://zybuluo.com/hanbingtao/note/581764
文章目录
无论即将到来的是大数据时代还是人工智能时代,亦或是传统行业使用人工智能在云上处理大数据的时代,作为一个有理想有追求的程序员,不懂深度学习(Deep Learning)这个超热的技术,会不会感觉马上就out了?现在救命稻草来了,《零基础入门深度学习》系列文章旨在讲帮助爱编程的你从零基础达到入门级水平。零基础意味着你不需要太多的数学知识,只要会写程序就行了,没错,这是专门为程序员写的文章。虽然文中会有很多公式你也许看不懂,但同时也会有更多的代码,程序员的你一定能看懂的(我周围是一群狂热的Clean Code程序员,所以我写的代码也不会很差)。
0 文章列表
零基础入门深度学习(1) - 感知器
零基础入门深度学习(2) - 线性单元和梯度下降
零基础入门深度学习(3) - 神经网络和反向传播算法
零基础入门深度学习(4) - 卷积神经网络
零基础入门深度学习(5) - 循环神经网络
零基础入门深度学习(6) - 长短时记忆网络(LSTM)
零基础入门深度学习(7) - 递归神经网络
1 往期回顾
在上一篇文章中,我们介绍了循环神经网络以及它的训练算法。我们也介绍了循环神经网络很难训练的原因,这导致了它在实际应用中,很难处理长距离的依赖。在本文中,我们将介绍一种改进之后的循环神经网络:长短时记忆网络(Long Short Term Memory Network, LSTM),它成功的解决了原始循环神经网络的缺陷,成为当前最流行的RNN,在语音识别、图片描述、自然语言处理等许多领域中成功应用。但不幸的一面是,LSTM的结构很复杂,因此,我们需要花上一些力气,才能把LSTM以及它的训练算法弄明白。在搞清楚LSTM之后,我们再介绍一种LSTM的变体:GRU (Gated Recurrent Unit)。 它的结构比LSTM简单,而效果却和LSTM一样好,因此,它正在逐渐流行起来。最后,我们仍然会动手实现一个LSTM。
2 长短时记忆网络是啥
我们首先了解一下长短时记忆网络产生的背景。回顾一下零基础入门深度学习(5) - 循环神经网络中推导的,误差项沿时间反向传播的公式:
δ k T = δ t T ∏ i = k t − 1 d i a g [ f ′ ( n e t i ) ] W \begin{aligned} \delta_k^T=&\delta_t^T\prod_{i=k}^{t-1}diag[f'(\mathbf{net}_{i})]W\\ \end{aligned} δkT=δtTi=k∏t−1diag[f′(neti)]W
我们可以根据下面的不等式,来获取 δ k T \delta_k^T δkT的模的上界(模可以看做对 δ k T \delta_k^T δkT中每一项值的大小的度量):
∥ δ k T ∥ ⩽ ∥ δ t T ∥ ∏ i = k t − 1 ∥ d i a g [ f ′ ( n e t i ) ] ∥ ∥ W ∥ ⩽ ∥ δ t T ∥ ( β f β W ) t − k \begin{aligned} \|\delta_k^T\|\leqslant&\|\delta_t^T\|\prod_{i=k}^{t-1}\|diag[f'(\mathbf{net}_{i})]\|\|W\|\\ \leqslant&\|\delta_t^T\|(\beta_f\beta_W)^{t-k} \end{aligned} ∥δkT∥⩽⩽∥δtT∥i=k∏t−1∥diag[f′(neti)]∥∥W∥∥δtT∥(βfβW)t−k
我们可以看到,误差项 δ \delta δ从t时刻传递到 k k k时刻,其值的上界是 β f β w \beta_f\beta_w βfβw的指数函数。 β f β w \beta_f\beta_w βfβw分别是对角矩阵 d i a g [ f ′ ( n e t i ) ] diag[f'(\mathbf{net}_{i})] diag[f′(neti)]和矩阵 W W W模的上界。显然,除非 β f β w \beta_f\beta_w βfβw乘积的值位于1附近,否则,当 t − k t-k t−k很大时(也就是误差传递很多个时刻时),整个式子的值就会变得极小(当 β f β w \beta_f\beta_w βfβw乘积小于1)或者极大(当 β f β w \beta_f\beta_w βfβw乘积大于1),前者就是梯度消失,后者就是梯度爆炸。虽然科学家们搞出了很多技巧(比如怎样初始化权重),让 β f β w \beta_f\beta_w βfβw的值尽可能贴近于1,终究还是难以抵挡指数函数的威力。
梯度消失到底意味着什么?在零基础入门深度学习(5) - 循环神经网络中我们已证明,权重数组W最终的梯度是各个时刻的梯度之和,即:
∇ W E = ∑ k = 1 t ∇ W k E = ∇ W t E + ∇ W t − 1 E + ∇ W t − 2 E + . . . + ∇ W 1 E \begin{aligned} \nabla_WE&=\sum_{k=1}^t\nabla_{Wk}E\\ &=\nabla_{Wt}E+\nabla_{Wt-1}E+\nabla_{Wt-2}E+...+\nabla_{W1}E \end{aligned} ∇WE=k=1∑t∇WkE=∇WtE+∇Wt−1E+∇Wt−2E+...+∇W1E
假设某轮训练中,各时刻的梯度以及最终的梯度之和如下图:
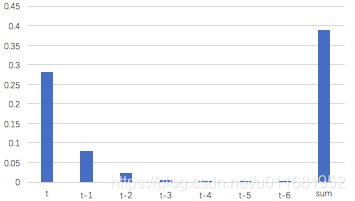
我们就可以看到,从上图的t-3时刻开始,梯度已经几乎减少到0了。那么,从这个时刻开始再往之前走,得到的梯度(几乎为零)就不会对最终的梯度值有任何贡献,这就相当于无论t-3时刻之前的网络状态h是什么,在训练中都不会对权重数组W的更新产生影响,也就是网络事实上已经忽略了t-3时刻之前的状态。这就是原始RNN无法处理长距离依赖的原因。
既然找到了问题的原因,那么我们就能解决它。从问题的定位到解决,科学家们大概花了7、8年时间。终于有一天,Hochreiter和Schmidhuber两位科学家发明出长短时记忆网络,一举解决这个问题。
其实,长短时记忆网络的思路比较简单。原始RNN的隐藏层只有一个状态,即h,它对于短期的输入非常敏感。那么,假如我们再增加一个状态,即c,让它来保存长期的状态,那么问题不就解决了么?如下图所示:
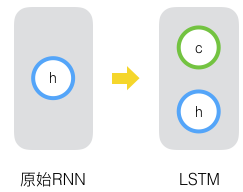
新增加的状态c,称为单元状态(cell state)。我们把上图按照时间维度展开:
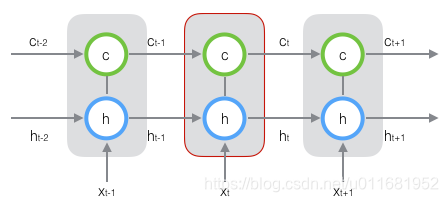
上图仅仅是一个示意图,我们可以看出,在t时刻,LSTM的输入有三个:当前时刻网络的输入值 x t \mathbf{x}_t xt、上一时刻LSTM的输出值 h t − 1 \mathbf{h}_{t-1} ht−1、以及上一时刻的单元状态 c t − 1 \mathbf{c}_{t-1} ct−1;LSTM的输出有两个 h t \mathbf{h}_t ht:当前时刻LSTM输出值 c t \mathbf{c}_t ct、和当前时刻的单元状态。注意 x x x、 h h h、 c c c都是向量。
LSTM的关键,就是怎样控制长期状态c。在这里,LSTM的思路是使用三个控制开关。第一个开关,负责控制继续保存长期状态c;第二个开关,负责控制把即时状态输入到长期状态c;第三个开关,负责控制是否把长期状态c作为当前的LSTM的输出。三个开关的作用如下图所示:
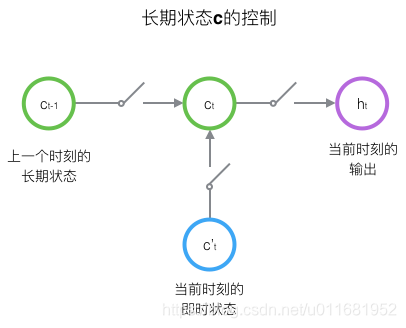
接下来,我们要描述一下,输出h和单元状态c的具体计算方法。
3 长短时记忆网络的前向计算
前面描述的开关是怎样在算法中实现的呢?这就用到了门(gate)的概念。门实际上就是一层全连接层,它的输入是一个向量,输出是一个0到1之间的实数向量。假设W是门的权重向量, b b b是偏置项,那么门可以表示为:
g ( x ) = σ ( W x + b ) g(\mathbf{x})=\sigma(W\mathbf{x}+\mathbf{b}) g(x)=σ(Wx+b)
门的使用,就是用门的输出向量按元素乘以我们需要控制的那个向量。因为门的输出是0到1之间的实数向量,那么,当门输出为0时,任何向量与之相乘都会得到0向量,这就相当于啥都不能通过;输出为1时,任何向量与之相乘都不会有任何改变,这就相当于啥都可以通过。因为 σ \sigma σ(也就是sigmoid函数)的值域是(0,1),所以门的状态都是半开半闭的。
LSTM用两个门来控制单元状态c的内容,一个是遗忘门(forget gate),它决定了上一时刻的单元状态 c t − 1 \mathbf{c}_{t-1} ct−1有多少保留到当前时刻 c t \mathbf{c}_t ct;另一个是输入门(input gate),它决定了当前时刻网络的输入 x t \mathbf{x}_t xt有多少保存到单元状态 c t \mathbf{c}_t ct。LSTM用输出门(output gate)来控制单元状态 c t \mathbf{c}_t ct有多少输出到LSTM的当前输出值 h t \mathbf{h}_t ht。
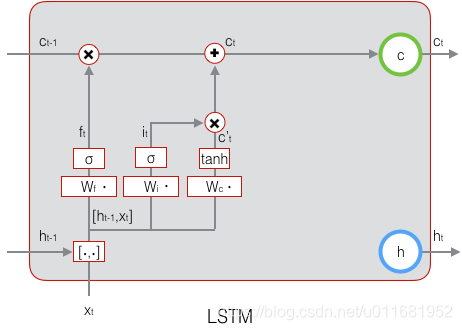
我们先来看一下遗忘门:
f t = σ ( W f ⋅ [ h t − 1 , x t ] + b f ) ( 式 1 ) \mathbf{f}_t=\sigma(W_f\cdot[\mathbf{h}_{t-1},\mathbf{x}_t]+\mathbf{b}_f)\qquad\quad(式1) ft=σ(Wf⋅[ht−1,xt]+bf)(式1)
上式中, W f W_f Wf是遗忘门的权重矩阵, [ h t − 1 , x t ] [\mathbf{h}_{t-1},\mathbf{x}_t] [ht−1,xt]表示把两个向量连接成一个更长的向量, b f \mathbf{b}_f bf是遗忘门的偏置项, σ \sigma σ是sigmoid函数。如果输入的维度是 d x d_x dx,隐藏层的维度是 d h d_h dh,单元状态的维度是 d x d_x dx(通常 d c = d h d_c=d_h dc=dh),则遗忘门的权重矩阵 W f W_f Wf维度是 d c × ( d h + d x ) d_c\times (d_h+d_x) dc×(dh+dx)。事实上, W f W_f Wf权重矩阵都是两个矩阵拼接而成的:一个是 W f h W_{fh} Wfh,它对应着输入项 h t − 1 \mathbf{h}_{t-1} ht−1,其维度为 d c × d h d_c\times d_h dc×dh;一个是 W f x W_{fx} Wfx,它对应着输入项 x t \mathbf{x}_t xt,其维度为 d c × d x d_c\times d_x dc×dx。 W f W_f Wf可以写为:
[ W f ] [ h t − 1 x t ] = [ W f h W f x ] [ h t − 1 x t ] = W f h h t − 1 + W f x x t \begin{aligned} \begin{bmatrix}W_f\end{bmatrix}\begin{bmatrix}\mathbf{h}_{t-1}\\ \mathbf{x}_t\end{bmatrix}&= \begin{bmatrix}W_{fh}&W_{fx}\end{bmatrix}\begin{bmatrix}\mathbf{h}_{t-1}\\ \mathbf{x}_t\end{bmatrix}\\ &=W_{fh}\mathbf{h}_{t-1}+W_{fx}\mathbf{x}_t \end{aligned} [Wf][ht−1xt]=[WfhWfx][ht−1xt]=Wfhht−1+Wfxxt
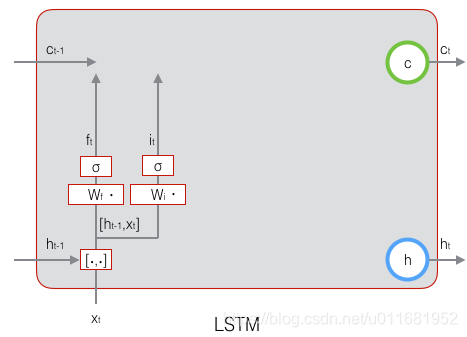
下图显示了遗忘门的计算:
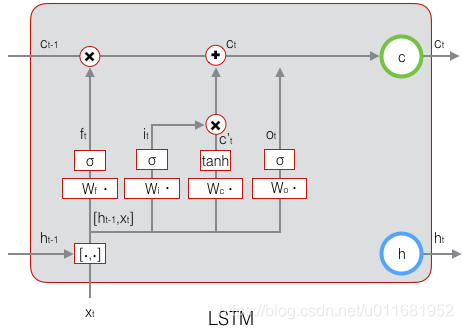
接下来看看输入门:
i t = σ ( W i ⋅ [ h t − 1 , x t ] + b i ) ( 式 2 ) \mathbf{i}_t=\sigma(W_i\cdot[\mathbf{h}_{t-1},\mathbf{x}_t]+\mathbf{b}_i)\qquad\quad(式2) it=σ(Wi⋅[ht−1,xt]+bi)(式2)
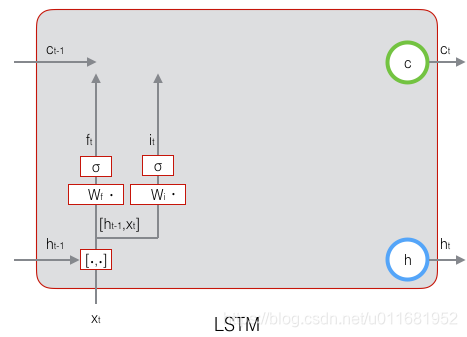
上式中, W i W_i Wi是输入门的权重矩阵, b i b_i bi是输入门的偏置项。下图表示了输入门的计算:
接下来,我们计算用于描述当前输入的单元状态 c ~ t \mathbf{\tilde{c}}_t c~t,它是根据上一次的输出和本次输入来计算的:
c ~ t = tanh ( W c ⋅ [ h t − 1 , x t ] + b c ) ( 式 3 ) \mathbf{\tilde{c}}_t=\tanh(W_c\cdot[\mathbf{h}_{t-1},\mathbf{x}_t]+\mathbf{b}_c)\qquad\quad(式3) c~t=tanh(Wc⋅[ht−1,xt]+bc)(式3)
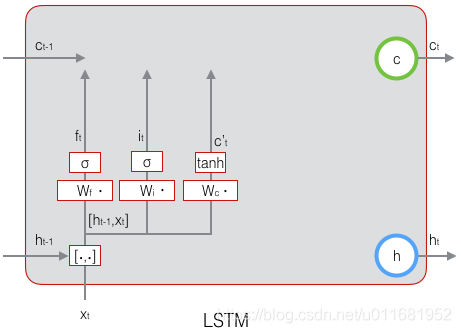
下图是 c ~ t \mathbf{\tilde{c}}_t c~t的计算:
现在,我们计算当前时刻的单元状态 c t \mathbf{c}_t ct。它是由上一次的单元状态 c t − 1 \mathbf{c}_{t-1} ct−1按元素乘以遗忘门 f t f_t ft,再用当前输入的单元状态 c ~ t \mathbf{\tilde{c}}_t c~t按元素乘以输入门 i t i_t it,再将两个积加和产生的:
c t = f t ∘ c t − 1 + i t ∘ c ~ t ( 式 4 ) \mathbf{c}_t=f_t\circ{\mathbf{c}_{t-1}}+i_t\circ{\mathbf{\tilde{c}}_t}\qquad\quad(式4) ct=ft∘ct−1+it∘c~t(式4)
符号 ∘ \circ ∘表示按元素乘。下图是 c t \mathbf{c}_t ct的计算:
这样,我们就把LSTM关于当前的记忆 c ~ t \mathbf{\tilde{c}}_t c~t和长期的记忆 c t − 1 \mathbf{c}_{t-1} ct−1组合在一起,形成了新的单元状态 c t \mathbf{c}_t ct。由于遗忘门的控制,它可以保存很久很久之前的信息,由于输入门的控制,它又可以避免当前无关紧要的内容进入记忆。下面,我们要看看输出门,它控制了长期记忆对当前输出的影响:
o t = σ ( W o ⋅ [ h t − 1 , x t ] + b o ) ( 式 5 ) \mathbf{o}_t=\sigma(W_o\cdot[\mathbf{h}_{t-1},\mathbf{x}_t]+\mathbf{b}_o)\qquad\quad(式5) ot=σ(Wo⋅[ht−1,xt]+bo)(式5)
下图表示输出门的计算:
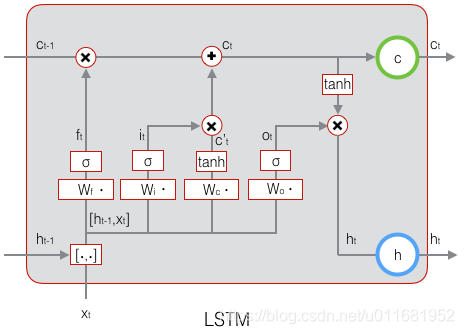
LSTM最终的输出,是由输出门和单元状态共同确定的:
h t = o t ∘ tanh ( c t ) ( 式 6 ) \mathbf{h}_t=\mathbf{o}_t\circ \tanh(\mathbf{c}_t)\qquad\quad(式6) ht=ot∘tanh(ct)(式6)
下图表示LSTM最终输出的计算:
式1到式6就是LSTM前向计算的全部公式。至此,我们就把LSTM前向计算讲完了。
4 长短时记忆网络的训练
熟悉我们这个系列文章的同学都清楚,训练部分往往比前向计算部分复杂多了。LSTM的前向计算都这么复杂,那么,可想而知,它的训练算法一定是非常非常复杂的。现在只有做几次深呼吸,再一头扎进公式海洋吧。
4.1 LSTM训练算法框架
LSTM的训练算法仍然是反向传播算法,对于这个算法,我们已经非常熟悉了。主要有下面三个步骤:
- 前向计算每个神经元的输出值,对于LSTM来说,即 f t \mathbf{f}_t ft、 i t \mathbf{i}_t it、 c t \mathbf{c}_t ct、 o t \mathbf{o}_t ot、 h t \mathbf{h}_t ht五个向量的值。计算方法已经在上一节中描述过了。
- 反向计算每个神经元的误差项 δ \delta δ值。与循环神经网络一样,LSTM误差项的反向传播也是包括两个方向:一个是沿时间的反向传播,即从当前t时刻开始,计算每个时刻的误差项;一个是将误差项向上一层传播。
- 根据相应的误差项,计算每个权重的梯度。
4.2 关于公式和符号的说明
首先,我们对推导中用到的一些公式、符号做一下必要的说明。
接下来的推导中,我们设定gate的激活函数为sigmoid函数,输出的激活函数为tanh函数。他们的导数分别为:
σ ( z ) = y = 1 1 + e − z σ ′ ( z ) = y ( 1 − y ) tanh ( z ) = y = e z − e − z e z + e − z tanh ′ ( z ) = 1 − y 2 \begin{aligned} \sigma(z)&=y=\frac{1}{1+e^{-z}}\\ \sigma'(z)&=y(1-y)\\ \tanh(z)&=y=\frac{e^z-e^{-z}}{e^z+e^{-z}}\\ \tanh'(z)&=1-y^2 \end{aligned} σ(z)σ′(z)tanh(z)tanh′(z)=y=1+e−z1=y(1−y)=y=ez+e−zez−e−z=1−y2
从上面可以看出,sigmoid和tanh函数的导数都是原函数的函数。这样,我们一旦计算原函数的值,就可以用它来计算出导数的值。
LSTM需要学习的参数共有8组,分别是:
- 遗忘门的权重矩阵 W f W_f Wf和偏置项 b f b_f bf
- 输入门的权重矩阵 W i W_i Wi和偏置项 b i b_i bi
- 输出门的权重矩阵 W o W_o Wo和偏置项 b o b_o bo
- 计算单元状态的权重矩阵 W c W_c Wc和偏置项 b c b_c bc
因为权重矩阵的两部分在反向传播中使用不同的公式,因此在后续的推导中,权重矩阵 W f W_f Wf、 W i W_i Wi、 W o W_o Wo、 W c W_c Wc都将被写为分开的两个矩阵: W f h W_{fh} Wfh、 W f x W_{fx} Wfx、 W i h W_{ih} Wih、 W i x W_{ix} Wix、 W o h W_{oh} Woh、 W o x W_{ox} Wox、 W c h W_{ch} Wch、 W c x W_{cx} Wcx。
我们解释一下按元素乘 ∘ \circ ∘符号。当 ∘ \circ ∘作用于两个向量时,运算如下:
a ∘ b = [ a 1 a 2 a 3 . . . a n ] ∘ [ b 1 b 2 b 3 . . . b n ] = [ a 1 b 1 a 2 b 2 a 3 b 3 . . . a n b n ] \mathbf{a}\circ\mathbf{b}=\begin{bmatrix} a_1\\a_2\\a_3\\...\\a_n \end{bmatrix}\circ\begin{bmatrix} b_1\\b_2\\b_3\\...\\b_n \end{bmatrix}=\begin{bmatrix} a_1b_1\\a_2b_2\\a_3b_3\\...\\a_nb_n \end{bmatrix} a∘b=⎣⎢⎢⎢⎢⎡a1a2a3...an⎦⎥⎥⎥⎥⎤∘⎣⎢⎢⎢⎢⎡b1b2b3...bn⎦⎥⎥⎥⎥⎤=⎣⎢⎢⎢⎢⎡a1b1a2b2a3b3...anbn⎦⎥⎥⎥⎥⎤
当 ∘ \circ ∘作用于一个向量和一个矩阵时,运算如下:
a ∘ X = [ a 1 a 2 a 3 . . . a n ] ∘ [ x 11 x 12 x 13 . . . x 1 n x 21 x 22 x 23 . . . x 2 n x 31 x 32 x 33 . . . x 3 n . . . x n 1 x n 2 x n 3 . . . x n n ] = [ a 1 x 11 a 1 x 12 a 1 x 13 . . . a 1 x 1 n a 2 x 21 a 2 x 22 a 2 x 23 . . . a 2 x 2 n a 3 x 31 a 3 x 32 a 3 x 33 . . . a 3 x 3 n . . . a n x n 1 a n x n 2 a n x n 3 . . . a n x n n ] \begin{aligned} \mathbf{a}\circ X&=\begin{bmatrix} a_1\\a_2\\a_3\\...\\a_n \end{bmatrix}\circ\begin{bmatrix} x_{11} & x_{12} & x_{13} & ... & x_{1n}\\ x_{21} & x_{22} & x_{23} & ... & x_{2n}\\ x_{31} & x_{32} & x_{33} & ... & x_{3n}\\ & & ...\\ x_{n1} & x_{n2} & x_{n3} & ... & x_{nn}\\ \end{bmatrix}\\ &=\begin{bmatrix} a_1x_{11} & a_1x_{12} & a_1x_{13} & ... & a_1x_{1n}\\ a_2x_{21} & a_2x_{22} & a_2x_{23} & ... & a_2x_{2n}\\ a_3x_{31} & a_3x_{32} & a_3x_{33} & ... & a_3x_{3n}\\ & & ...\\ a_nx_{n1} & a_nx_{n2} & a_nx_{n3} & ... & a_nx_{nn}\\ \end{bmatrix} \end{aligned} a∘X=⎣⎢⎢⎢⎢⎡a1a2a3...an⎦⎥⎥⎥⎥⎤∘⎣⎢⎢⎢⎢⎡x11x21x31xn1x12x22x32xn2x13x23x33...xn3............x1nx2nx3nxnn⎦⎥⎥⎥⎥⎤=⎣⎢⎢⎢⎢⎡a1x11a2x21a3x31anxn1a1x12a2x22a3x32anxn2a1x13a2x23a3x33...anxn3............a1x1na2x2na3x3nanxnn⎦⎥⎥⎥⎥⎤
当 ∘ \circ ∘作用于两个矩阵时,两个矩阵对应位置的元素相乘。按元素乘可以在某些情况下简化矩阵和向量运算。例如,当一个对角矩阵右乘一个矩阵时,相当于用对角矩阵的对角线组成的向量按元素乘那个矩阵:
d i a g [ a ] X = a ∘ X diag[\mathbf{a}]X=\mathbf{a}\circ X diag[a]X=a∘X
当一个行向量右乘一个对角矩阵时,相当于这个行向量按元素乘那个矩阵对角线组成的向量:
a T d i a g [ b ] = a ∘ b \mathbf{a}^Tdiag[\mathbf{b}]=\mathbf{a}\circ\mathbf{b} aTdiag[b]=a∘b
上面这两点,在我们后续推导中会多次用到。
在t时刻,LSTM的输出值为 h t \mathbf{h}_t ht。我们定义t时刻的误差项 δ t \delta_t δt为:
δ t = d e f ∂ E ∂ h t \delta_t\overset{def}{=}\frac{\partial{E}}{\partial{\mathbf{h}_t}} δt=def∂ht∂E
注意,和前面几篇文章不同,我们这里假设误差项是损失函数对输出值的导数,而不是对加权输入 n e t t l net_t^l nettl的导数。因为LSTM有四个加权输入,分别对应 f t \mathbf{f}_t ft、 i t \mathbf{i}_t it、 c t \mathbf{c}_t ct、 o t \mathbf{o}_t ot,我们希望往上一层传递一个误差项而不是四个。但我们仍然需要定义出这四个加权输入,以及他们对应的误差项。
n e t f , t = W f [ h t − 1 , x t ] + b f = W f h h t − 1 + W f x x t + b f n e t i , t = W i [ h t − 1 , x t ] + b i = W i h h t − 1 + W i x x t + b i n e t c ~ , t = W c [ h t − 1 , x t ] + b c = W c h h t − 1 + W c x x t + b c n e t o , t = W o [ h t − 1 , x t ] + b o = W o h h t − 1 + W o x x t + b o δ f , t = d e f ∂ E ∂ n e t f , t δ i , t = d e f ∂ E ∂ n e t i , t δ c ~ , t = d e f ∂ E ∂ n e t c ~ , t δ o , t = d e f ∂ E ∂ n e t o , t \begin{aligned} \mathbf{net}_{f,t}&=W_f[\mathbf{h}_{t-1},\mathbf{x}_t]+\mathbf{b}_f\\ &=W_{fh}\mathbf{h}_{t-1}+W_{fx}\mathbf{x}_t+\mathbf{b}_f\\ \mathbf{net}_{i,t}&=W_i[\mathbf{h}_{t-1},\mathbf{x}_t]+\mathbf{b}_i\\ &=W_{ih}\mathbf{h}_{t-1}+W_{ix}\mathbf{x}_t+\mathbf{b}_i\\ \mathbf{net}_{\tilde{c},t}&=W_c[\mathbf{h}_{t-1},\mathbf{x}_t]+\mathbf{b}_c\\ &=W_{ch}\mathbf{h}_{t-1}+W_{cx}\mathbf{x}_t+\mathbf{b}_c\\ \mathbf{net}_{o,t}&=W_o[\mathbf{h}_{t-1},\mathbf{x}_t]+\mathbf{b}_o\\ &=W_{oh}\mathbf{h}_{t-1}+W_{ox}\mathbf{x}_t+\mathbf{b}_o\\ \delta_{f,t}&\overset{def}{=}\frac{\partial{E}}{\partial{\mathbf{net}_{f,t}}}\\ \delta_{i,t}&\overset{def}{=}\frac{\partial{E}}{\partial{\mathbf{net}_{i,t}}}\\ \delta_{\tilde{c},t}&\overset{def}{=}\frac{\partial{E}}{\partial{\mathbf{net}_{\tilde{c},t}}}\\ \delta_{o,t}&\overset{def}{=}\frac{\partial{E}}{\partial{\mathbf{net}_{o,t}}}\\ \end{aligned} netf,tneti,tnetc~,tneto,tδf,tδi,tδc~,tδo,t=Wf[ht−1,xt]+bf=Wfhht−1+Wfxxt+bf=Wi[ht−1,xt]+bi=Wihht−1+Wixxt+bi=Wc[ht−1,xt]+bc=Wchht−1+Wcxxt+bc=Wo[ht−1,xt]+bo=Wohht−1+Woxxt+bo=def∂netf,t∂E=def∂neti,t∂E=def∂netc~,t∂E=def∂neto,t∂E
4.3 误差项沿时间的反向传递
沿时间反向传递误差项,就是要计算出t-1时刻的误差项 δ t − 1 \delta_{t-1} δt−1。
δ t − 1 T = ∂ E ∂ h t − 1 = ∂ E ∂ h t ∂ h t ∂ h t − 1 = δ t T ∂ h t ∂ h t − 1 \begin{aligned} \delta_{t-1}^T&=\frac{\partial{E}}{\partial{\mathbf{h_{t-1}}}}\\ &=\frac{\partial{E}}{\partial{\mathbf{h_t}}}\frac{\partial{\mathbf{h_t}}}{\partial{\mathbf{h_{t-1}}}}\\ &=\delta_{t}^T\frac{\partial{\mathbf{h_t}}}{\partial{\mathbf{h_{t-1}}}} \end{aligned} δt−1T=∂ht−1∂E=∂ht∂E∂ht−1∂ht=δtT∂ht−1∂ht
我们知道, ∂ h t ∂ h t − 1 \frac{\partial{\mathbf{h_t}}}{\partial{\mathbf{h_{t-1}}}} ∂ht−1∂ht是一个Jacobian矩阵。如果隐藏层h的维度是N的话,那么它就是一个 N × N N\times N N×N矩阵。为了求出它,我们列出 h t \mathbf{h}_t ht的计算公式,即前面的式6和式4:
h t = o t ∘ tanh ( c t ) c t = f t ∘ c t − 1 + i t ∘ c ~ t \begin{aligned} \mathbf{h}_t&=\mathbf{o}_t\circ \tanh(\mathbf{c}_t)\\ \mathbf{c}_t&=\mathbf{f}_t\circ\mathbf{c}_{t-1}+\mathbf{i}_t\circ\mathbf{\tilde{c}}_t \end{aligned} htct=ot∘tanh(ct)=ft∘ct−1+it∘c~t
显然, o t \mathbf{o}_t ot、 f t \mathbf{f}_t ft、 i t \mathbf{i}_t it、 c ~ t \mathbf{\tilde{c}}_t c~t都是 h t − 1 \mathbf{h}_{t-1} ht−1的函数,那么,利用全导数公式可得:
δ t T ∂ h t ∂ h t − 1 = δ t T ∂ h t ∂ o t ∂ o t ∂ n e t o , t ∂ n e t o , t ∂ h t − 1 + δ t T ∂ h t ∂ c t ∂ c t ∂ f t ∂ f t ∂ n e t f , t ∂ n e t f , t ∂ h t − 1 + δ t T ∂ h t ∂ c t ∂ c t ∂ i t ∂ i t ∂ n e t i , t ∂ n e t i , t ∂ h t − 1 + δ t T ∂ h t ∂ c t ∂ c t ∂ c ~ t ∂ c ~ t ∂ n e t c ~ , t ∂ n e t c ~ , t ∂ h t − 1 = δ o , t T ∂ n e t o , t ∂ h t − 1 + δ f , t T ∂ n e t f , t ∂ h t − 1 + δ i , t T ∂ n e t i , t ∂ h t − 1 + δ c ~ , t T ∂ n e t c ~ , t ∂ h t − 1 ( 式 7 ) \begin{aligned} \delta_t^T\frac{\partial{\mathbf{h_t}}}{\partial{\mathbf{h_{t-1}}}}&=\delta_t^T\frac{\partial{\mathbf{h_t}}}{\partial{\mathbf{o}_t}}\frac{\partial{\mathbf{o}_t}}{\partial{\mathbf{net}_{o,t}}}\frac{\partial{\mathbf{net}_{o,t}}}{\partial{\mathbf{h_{t-1}}}} +\delta_t^T\frac{\partial{\mathbf{h_t}}}{\partial{\mathbf{c}_t}}\frac{\partial{\mathbf{c}_t}}{\partial{\mathbf{f_{t}}}}\frac{\partial{\mathbf{f}_t}}{\partial{\mathbf{net}_{f,t}}}\frac{\partial{\mathbf{net}_{f,t}}}{\partial{\mathbf{h_{t-1}}}} +\delta_t^T\frac{\partial{\mathbf{h_t}}}{\partial{\mathbf{c}_t}}\frac{\partial{\mathbf{c}_t}}{\partial{\mathbf{i_{t}}}}\frac{\partial{\mathbf{i}_t}}{\partial{\mathbf{net}_{i,t}}}\frac{\partial{\mathbf{net}_{i,t}}}{\partial{\mathbf{h_{t-1}}}} +\delta_t^T\frac{\partial{\mathbf{h_t}}}{\partial{\mathbf{c}_t}}\frac{\partial{\mathbf{c}_t}}{\partial{\mathbf{\tilde{c}}_{t}}}\frac{\partial{\mathbf{\tilde{c}}_t}}{\partial{\mathbf{net}_{\tilde{c},t}}}\frac{\partial{\mathbf{net}_{\tilde{c},t}}}{\partial{\mathbf{h_{t-1}}}}\\ &=\delta_{o,t}^T\frac{\partial{\mathbf{net}_{o,t}}}{\partial{\mathbf{h_{t-1}}}} +\delta_{f,t}^T\frac{\partial{\mathbf{net}_{f,t}}}{\partial{\mathbf{h_{t-1}}}} +\delta_{i,t}^T\frac{\partial{\mathbf{net}_{i,t}}}{\partial{\mathbf{h_{t-1}}}} +\delta_{\tilde{c},t}^T\frac{\partial{\mathbf{net}_{\tilde{c},t}}}{\partial{\mathbf{h_{t-1}}}}\qquad\quad(式7) \end{aligned} δtT∂ht−1∂ht=δtT∂ot∂ht∂neto,t∂ot∂ht−1∂neto,t+δtT∂ct∂ht∂ft∂ct∂netf,t∂ft∂ht−1∂netf,t+δtT∂ct∂ht∂it∂ct∂neti,t∂it∂ht−1∂neti,t+δtT∂ct∂ht∂c~t∂ct∂netc~,t∂c~t∂ht−1∂netc~,t=δo,tT∂ht−1∂neto,t+δf,tT∂ht−1∂netf,t+δi,tT∂ht−1∂neti,t+δc~,tT∂ht−1∂netc~,t(式7)
下面,我们要把式7中的每个偏导数都求出来。根据式6,我们可以求出:
∂ h t ∂ o t = d i a g [ tanh ( c t ) ] ∂ h t ∂ c t = d i a g [ o t ∘ ( 1 − tanh ( c t ) 2 ) ] \begin{aligned} \frac{\partial{\mathbf{h_t}}}{\partial{\mathbf{o}_t}}&=diag[\tanh(\mathbf{c}_t)]\\ \frac{\partial{\mathbf{h_t}}}{\partial{\mathbf{c}_t}}&=diag[\mathbf{o}_t\circ(1-\tanh(\mathbf{c}_t)^2)] \end{aligned} ∂ot∂ht∂ct∂ht=diag[tanh(ct)]=diag[ot∘(1−tanh(ct)2)]
根据式4,我们可以求出:
∂ c t ∂ f t = d i a g [ c t − 1 ] ∂ c t ∂ i t = d i a g [ c ~ t ] ∂ c t ∂ c ~ t = d i a g [ i t ] \begin{aligned} \frac{\partial{\mathbf{c}_t}}{\partial{\mathbf{f_{t}}}}&=diag[\mathbf{c}_{t-1}]\\ \frac{\partial{\mathbf{c}_t}}{\partial{\mathbf{i_{t}}}}&=diag[\mathbf{\tilde{c}}_t]\\ \frac{\partial{\mathbf{c}_t}}{\partial{\mathbf{\tilde{c}_{t}}}}&=diag[\mathbf{i}_t]\\ \end{aligned} ∂ft∂ct∂it∂ct∂c~t∂ct=diag[ct−1]=diag[c~t]=diag[it]
因为:
o t = σ ( n e t o , t ) n e t o , t = W o h h t − 1 + W o x x t + b o f t = σ ( n e t f , t ) n e t f , t = W f h h t − 1 + W f x x t + b f i t = σ ( n e t i , t ) n e t i , t = W i h h t − 1 + W i x x t + b i c ~ t = tanh ( n e t c ~ , t ) n e t c ~ , t = W c h h t − 1 + W c x x t + b c \begin{aligned} \mathbf{o}_t&=\sigma(\mathbf{net}_{o,t})\\ \mathbf{net}_{o,t}&=W_{oh}\mathbf{h}_{t-1}+W_{ox}\mathbf{x}_t+\mathbf{b}_o\\\\ \mathbf{f}_t&=\sigma(\mathbf{net}_{f,t})\\ \mathbf{net}_{f,t}&=W_{fh}\mathbf{h}_{t-1}+W_{fx}\mathbf{x}_t+\mathbf{b}_f\\\\ \mathbf{i}_t&=\sigma(\mathbf{net}_{i,t})\\ \mathbf{net}_{i,t}&=W_{ih}\mathbf{h}_{t-1}+W_{ix}\mathbf{x}_t+\mathbf{b}_i\\\\ \mathbf{\tilde{c}}_t&=\tanh(\mathbf{net}_{\tilde{c},t})\\ \mathbf{net}_{\tilde{c},t}&=W_{ch}\mathbf{h}_{t-1}+W_{cx}\mathbf{x}_t+\mathbf{b}_c\\ \end{aligned} otneto,tftnetf,titneti,tc~tnetc~,t=σ(neto,t)=Wohht−1+Woxxt+bo=σ(netf,t)=Wfhht−1+Wfxxt+bf=σ(neti,t)=Wihht−1+Wixxt+bi=tanh(netc~,t)=Wchht−1+Wcxxt+bc
我们很容易得出:
∂ o t ∂ n e t o , t = d i a g [ o t ∘ ( 1 − o t ) ] ∂ n e t o , t ∂ h t − 1 = W o h ∂ f t ∂ n e t f , t = d i a g [ f t ∘ ( 1 − f t ) ] ∂ n e t f , t ∂ h t − 1 = W f h ∂ i t ∂ n e t i , t = d i a g [ i t ∘ ( 1 − i t ) ] ∂ n e t i , t ∂ h t − 1 = W i h ∂ c ~ t ∂ n e t c ~ , t = d i a g [ 1 − c ~ t 2 ] ∂ n e t c ~ , t ∂ h t − 1 = W c h \begin{aligned} \frac{\partial{\mathbf{o}_t}}{\partial{\mathbf{net}_{o,t}}}&=diag[\mathbf{o}_t\circ(1-\mathbf{o}_t)]\\ \frac{\partial{\mathbf{net}_{o,t}}}{\partial{\mathbf{h_{t-1}}}}&=W_{oh}\\ \frac{\partial{\mathbf{f}_t}}{\partial{\mathbf{net}_{f,t}}}&=diag[\mathbf{f}_t\circ(1-\mathbf{f}_t)]\\ \frac{\partial{\mathbf{net}_{f,t}}}{\partial{\mathbf{h}_{t-1}}}&=W_{fh}\\ \frac{\partial{\mathbf{i}_t}}{\partial{\mathbf{net}_{i,t}}}&=diag[\mathbf{i}_t\circ(1-\mathbf{i}_t)]\\ \frac{\partial{\mathbf{net}_{i,t}}}{\partial{\mathbf{h}_{t-1}}}&=W_{ih}\\ \frac{\partial{\mathbf{\tilde{c}}_t}}{\partial{\mathbf{net}_{\tilde{c},t}}}&=diag[1-\mathbf{\tilde{c}}_t^2]\\ \frac{\partial{\mathbf{net}_{\tilde{c},t}}}{\partial{\mathbf{h}_{t-1}}}&=W_{ch} \end{aligned} ∂neto,t∂ot∂ht−1∂neto,t∂netf,t∂ft∂ht−1∂netf,t∂neti,t∂it∂ht−1∂neti,t∂netc~,t∂c~t∂ht−1∂netc~,t=diag[ot∘(1−ot)]=Woh=diag[ft∘(1−ft)]=Wfh=diag[it∘(1−it)]=Wih=diag[1−c~t2]=Wch
将上述偏导数带入到式7,我们得到:
δ t − 1 = δ o , t T ∂ n e t o , t ∂ h t − 1 + δ f , t T ∂ n e t f , t ∂ h t − 1 + δ i , t T ∂ n e t i , t ∂ h t − 1 + δ c ~ , t T ∂ n e t c ~ , t ∂ h t − 1 = δ o , t T W o h + δ f , t T W f h + δ i , t T W i h + δ c ~ , t T W c h ( 式 8 ) \begin{aligned} \delta_{t-1}&=\delta_{o,t}^T\frac{\partial{\mathbf{net}_{o,t}}}{\partial{\mathbf{h_{t-1}}}} +\delta_{f,t}^T\frac{\partial{\mathbf{net}_{f,t}}}{\partial{\mathbf{h_{t-1}}}} +\delta_{i,t}^T\frac{\partial{\mathbf{net}_{i,t}}}{\partial{\mathbf{h_{t-1}}}} +\delta_{\tilde{c},t}^T\frac{\partial{\mathbf{net}_{\tilde{c},t}}}{\partial{\mathbf{h_{t-1}}}}\\ &=\delta_{o,t}^T W_{oh} +\delta_{f,t}^TW_{fh} +\delta_{i,t}^TW_{ih} +\delta_{\tilde{c},t}^TW_{ch}\qquad\quad(式8)\\ \end{aligned} δt−1=δo,tT∂ht−1∂neto,t+δf,tT∂ht−1∂netf,t+δi,tT∂ht−1∂neti,t+δc~,tT∂ht−1∂netc~,t=δo,tTWoh+δf,tTWfh+δi,tTWih+δc~,tTWch(式8)
根据 δ o , t \delta_{o,t} δo,t、 δ f , t \delta_{f,t} δf,t、 δ i , t \delta_{i,t} δi,t、 δ c ~ , t \delta_{\tilde{c},t} δc~,t的定义,可知:
δ o , t T = δ t T ∘ tanh ( c t ) ∘ o t ∘ ( 1 − o t ) ( 式 9 ) δ f , t T = δ t T ∘ o t ∘ ( 1 − tanh ( c t ) 2 ) ∘ c t − 1 ∘ f t ∘ ( 1 − f t ) ( 式 10 ) δ i , t T = δ t T ∘ o t ∘ ( 1 − tanh ( c t ) 2 ) ∘ c ~ t ∘ i t ∘ ( 1 − i t ) ( 式 11 ) δ c ~ , t T = δ t T ∘ o t ∘ ( 1 − tanh ( c t ) 2 ) ∘ i t ∘ ( 1 − c ~ 2 ) ( 式 12 ) \begin{aligned} \delta_{o,t}^T&=\delta_t^T\circ\tanh(\mathbf{c}_t)\circ\mathbf{o}_t\circ(1-\mathbf{o}_t)\qquad\quad(式9)\\ \delta_{f,t}^T&=\delta_t^T\circ\mathbf{o}_t\circ(1-\tanh(\mathbf{c}_t)^2)\circ\mathbf{c}_{t-1}\circ\mathbf{f}_t\circ(1-\mathbf{f}_t)\qquad(式10)\\ \delta_{i,t}^T&=\delta_t^T\circ\mathbf{o}_t\circ(1-\tanh(\mathbf{c}_t)^2)\circ\mathbf{\tilde{c}}_t\circ\mathbf{i}_t\circ(1-\mathbf{i}_t)\qquad\quad(式11)\\ \delta_{\tilde{c},t}^T&=\delta_t^T\circ\mathbf{o}_t\circ(1-\tanh(\mathbf{c}_t)^2)\circ\mathbf{i}_t\circ(1-\mathbf{\tilde{c}}^2)\qquad\quad(式12)\\ \end{aligned} δo,tTδf,tTδi,tTδc~,tT=δtT∘tanh(ct)∘ot∘(1−ot)(式9)=δtT∘ot∘(1−tanh(ct)2)∘ct−1∘ft∘(1−ft)(式10)=δtT∘ot∘(1−tanh(ct)2)∘c~t∘it∘(1−it)(式11)=δtT∘ot∘(1−tanh(ct)2)∘it∘(1−c~2)(式12)
式8到式12就是将误差沿时间反向传播一个时刻的公式。有了它,我们可以写出将误差项向前传递到任意k时刻的公式:
δ k T = ∏ j = k t − 1 δ o , j T W o h + δ f , j T W f h + δ i , j T W i h + δ c ~ , j T W c h ( 式 13 ) \delta_k^T=\prod_{j=k}^{t-1}\delta_{o,j}^TW_{oh} +\delta_{f,j}^TW_{fh} +\delta_{i,j}^TW_{ih} +\delta_{\tilde{c},j}^TW_{ch}\qquad\quad(式13) δkT=j=k∏t−1δo,jTWoh+δf,jTWfh+δi,jTWih+δc~,jTWch(式13)
4.4 将误差项传递到上一层
我们假设当前为第l层,定义l-1层的误差项是误差函数对l-1层加权输入的导数,即:
δ t l − 1 = d e f ∂ E n e t t l − 1 \delta_t^{l-1}\overset{def}{=}\frac{\partial{E}}{\mathbf{net}_t^{l-1}} δtl−1=defnettl−1∂E
本次LSTM的输入 x t x_t xt由下面的公式计算:
x t l = f l − 1 ( n e t t l − 1 ) \mathbf{x}_t^l=f^{l-1}(\mathbf{net}_t^{l-1}) xtl=fl−1(nettl−1)
上式中, f l − 1 f^{l-1} fl−1表示第l-1层的激活函数。
因为 n e t f , t l \mathbf{net}_{f,t}^l netf,tl、 n e t i , t l \mathbf{net}_{i,t}^l neti,tl、 n e t c ~ , t l \mathbf{net}_{\tilde{c},t}^l netc~,tl、 n e t o , t l \mathbf{net}_{o,t}^l neto,tl都是 x t \mathbf{x}_t xt的函数, x t \mathbf{x}_t xt又是 n e t t l − 1 \mathbf{net}_t^{l-1} nettl−1的函数,因此,要求出E对 n e t t l − 1 \mathbf{net}_t^{l-1} nettl−1的导数,就需要使用全导数公式:
∂ E ∂ n e t t l − 1 = ∂ E ∂ n e t f , t l ∂ n e t f , t l ∂ x t l ∂ x t l ∂ n e t t l − 1 + ∂ E ∂ n e t i , t l ∂ n e t i , t l ∂ x t l ∂ x t l ∂ n e t t l − 1 + ∂ E ∂ n e t c ~ , t l ∂ n e t c ~ , t l ∂ x t l ∂ x t l ∂ n e t t l − 1 + ∂ E ∂ n e t o , t l ∂ n e t o , t l ∂ x t l ∂ x t l ∂ n e t t l − 1 = δ f , t T W f x ∘ f ′ ( n e t t l − 1 ) + δ i , t T W i x ∘ f ′ ( n e t t l − 1 ) + δ c ~ , t T W c x ∘ f ′ ( n e t t l − 1 ) + δ o , t T W o x ∘ f ′ ( n e t t l − 1 ) = ( δ f , t T W f x + δ i , t T W i x + δ c ~ , t T W c x + δ o , t T W o x ) ∘ f ′ ( n e t t l − 1 ) ( 式 14 ) \begin{aligned} \frac{\partial{E}}{\partial{\mathbf{net}_t^{l-1}}}&=\frac{\partial{E}}{\partial{\mathbf{\mathbf{net}_{f,t}^l}}}\frac{\partial{\mathbf{\mathbf{net}_{f,t}^l}}}{\partial{\mathbf{x}_t^l}}\frac{\partial{\mathbf{x}_t^l}}{\partial{\mathbf{\mathbf{net}_t^{l-1}}}} +\frac{\partial{E}}{\partial{\mathbf{\mathbf{net}_{i,t}^l}}}\frac{\partial{\mathbf{\mathbf{net}_{i,t}^l}}}{\partial{\mathbf{x}_t^l}}\frac{\partial{\mathbf{x}_t^l}}{\partial{\mathbf{\mathbf{net}_t^{l-1}}}} +\frac{\partial{E}}{\partial{\mathbf{\mathbf{net}_{\tilde{c},t}^l}}}\frac{\partial{\mathbf{\mathbf{net}_{\tilde{c},t}^l}}}{\partial{\mathbf{x}_t^l}}\frac{\partial{\mathbf{x}_t^l}}{\partial{\mathbf{\mathbf{net}_t^{l-1}}}} +\frac{\partial{E}}{\partial{\mathbf{\mathbf{net}_{o,t}^l}}}\frac{\partial{\mathbf{\mathbf{net}_{o,t}^l}}}{\partial{\mathbf{x}_t^l}}\frac{\partial{\mathbf{x}_t^l}}{\partial{\mathbf{\mathbf{net}_t^{l-1}}}}\\ &=\delta_{f,t}^TW_{fx}\circ f'(\mathbf{net}_t^{l-1})+\delta_{i,t}^TW_{ix}\circ f'(\mathbf{net}_t^{l-1})+\delta_{\tilde{c},t}^TW_{cx}\circ f'(\mathbf{net}_t^{l-1})+\delta_{o,t}^TW_{ox}\circ f'(\mathbf{net}_t^{l-1})\\ &=(\delta_{f,t}^TW_{fx}+\delta_{i,t}^TW_{ix}+\delta_{\tilde{c},t}^TW_{cx}+\delta_{o,t}^TW_{ox})\circ f'(\mathbf{net}_t^{l-1})\qquad\quad(式14) \end{aligned} ∂nettl−1∂E=∂netf,tl∂E∂xtl∂netf,tl∂nettl−1∂xtl+∂neti,tl∂E∂xtl∂neti,tl∂nettl−1∂xtl+∂netc~,tl∂E∂xtl∂netc~,tl∂nettl−1∂xtl+∂neto,tl∂E∂xtl∂neto,tl∂nettl−1∂xtl=δf,tTWfx∘f′(nettl−1)+δi,tTWix∘f′(nettl−1)+δc~,tTWcx∘f′(nettl−1)+δo,tTWox∘f′(nettl−1)=(δf,tTWfx+δi,tTWix+δc~,tTWcx+δo,tTWox)∘f′(nettl−1)(式14)
式14就是将误差传递到上一层的公式。
4.5 权重梯度的计算
对于 W f h W_{fh} Wfh、 W i h W_{ih} Wih、 W c h W_{ch} Wch、 W o h W_{oh} Woh的权重梯度,我们知道它的梯度是各个时刻梯度之和(证明过程请参考文章零基础入门深度学习(5) - 循环神经网络),我们首先求出它们在t时刻的梯度,然后再求出他们最终的梯度。
我们已经求得了误差项 δ o , t \delta_{o,t} δo,t、 δ f , t \delta_{f,t} δf,t、 δ i , t \delta_{i,t} δi,t、 δ c ~ , t \delta_{\tilde{c},t} δc~,t,很容易求出t时刻的 W f h W_{fh} Wfh、 W i h W_{ih} Wih、 W c h W_{ch} Wch、 W o h W_{oh} Woh:
∂ E ∂ W o h , t = ∂ E ∂ n e t o , t ∂ n e t o , t ∂ W o h , t = δ o , t h t − 1 T ∂ E ∂ W f h , t = ∂ E ∂ n e t f , t ∂ n e t f , t ∂ W f h , t = δ f , t h t − 1 T ∂ E ∂ W i h , t = ∂ E ∂ n e t i , t ∂ n e t i , t ∂ W i h , t = δ i , t h t − 1 T ∂ E ∂ W c h , t = ∂ E ∂ n e t c ~ , t ∂ n e t c ~ , t ∂ W c h , t = δ c ~ , t h t − 1 T \begin{aligned} \frac{\partial{E}}{\partial{W_{oh,t}}}&=\frac{\partial{E}}{\partial{\mathbf{net}_{o,t}}}\frac{\partial{\mathbf{net}_{o,t}}}{\partial{W_{oh,t}}}\\ &=\delta_{o,t}\mathbf{h}_{t-1}^T\\\\ \frac{\partial{E}}{\partial{W_{fh,t}}}&=\frac{\partial{E}}{\partial{\mathbf{net}_{f,t}}}\frac{\partial{\mathbf{net}_{f,t}}}{\partial{W_{fh,t}}}\\ &=\delta_{f,t}\mathbf{h}_{t-1}^T\\\\ \frac{\partial{E}}{\partial{W_{ih,t}}}&=\frac{\partial{E}}{\partial{\mathbf{net}_{i,t}}}\frac{\partial{\mathbf{net}_{i,t}}}{\partial{W_{ih,t}}}\\ &=\delta_{i,t}\mathbf{h}_{t-1}^T\\\\ \frac{\partial{E}}{\partial{W_{ch,t}}}&=\frac{\partial{E}}{\partial{\mathbf{net}_{\tilde{c},t}}}\frac{\partial{\mathbf{net}_{\tilde{c},t}}}{\partial{W_{ch,t}}}\\ &=\delta_{\tilde{c},t}\mathbf{h}_{t-1}^T\\ \end{aligned} ∂Woh,t∂E∂Wfh,t∂E∂Wih,t∂E∂Wch,t∂E=∂neto,t∂E∂Woh,t∂neto,t=δo,tht−1T=∂netf,t∂E∂Wfh,t∂netf,t=δf,tht−1T=∂neti,t∂E∂Wih,t∂neti,t=δi,tht−1T=∂netc~,t∂E∂Wch,t∂netc~,t=δc~,tht−1T
将各个时刻的梯度加在一起,就能得到最终的梯度:
∂ E ∂ W o h = ∑ j = 1 t δ o , j h j − 1 T ∂ E ∂ W f h = ∑ j = 1 t δ f , j h j − 1 T ∂ E ∂ W i h = ∑ j = 1 t δ i , j h j − 1 T ∂ E ∂ W c h = ∑ j = 1 t δ c ~ , j h j − 1 T \begin{aligned} \frac{\partial{E}}{\partial{W_{oh}}}&=\sum_{j=1}^t\delta_{o,j}\mathbf{h}_{j-1}^T\\ \frac{\partial{E}}{\partial{W_{fh}}}&=\sum_{j=1}^t\delta_{f,j}\mathbf{h}_{j-1}^T\\ \frac{\partial{E}}{\partial{W_{ih}}}&=\sum_{j=1}^t\delta_{i,j}\mathbf{h}_{j-1}^T\\ \frac{\partial{E}}{\partial{W_{ch}}}&=\sum_{j=1}^t\delta_{\tilde{c},j}\mathbf{h}_{j-1}^T\\ \end{aligned} ∂Woh∂E∂Wfh∂E∂Wih∂E∂Wch∂E=j=1∑tδo,jhj−1T=j=1∑tδf,jhj−1T=j=1∑tδi,jhj−1T=j=1∑tδc~,jhj−1T
对于偏置项 b f \mathbf{b}_f bf、 b i \mathbf{b}_i bi、 b c \mathbf{b}_c bc、 b o \mathbf{b}_o bo的梯度,也是将各个时刻的梯度加在一起。下面是各个时刻的偏置项梯度:
∂ E ∂ b o , t = ∂ E ∂ n e t o , t ∂ n e t o , t ∂ b o , t = δ o , t ∂ E ∂ b f , t = ∂ E ∂ n e t f , t ∂ n e t f , t ∂ b f , t = δ f , t ∂ E ∂ b i , t = ∂ E ∂ n e t i , t ∂ n e t i , t ∂ b i , t = δ i , t ∂ E ∂ b c , t = ∂ E ∂ n e t c ~ , t ∂ n e t c ~ , t ∂ b c , t = δ c ~ , t \begin{aligned} \frac{\partial{E}}{\partial{\mathbf{b}_{o,t}}}&=\frac{\partial{E}}{\partial{\mathbf{net}_{o,t}}}\frac{\partial{\mathbf{net}_{o,t}}}{\partial{\mathbf{b}_{o,t}}}\\ &=\delta_{o,t}\\\\ \frac{\partial{E}}{\partial{\mathbf{b}_{f,t}}}&=\frac{\partial{E}}{\partial{\mathbf{net}_{f,t}}}\frac{\partial{\mathbf{net}_{f,t}}}{\partial{\mathbf{b}_{f,t}}}\\ &=\delta_{f,t}\\\\ \frac{\partial{E}}{\partial{\mathbf{b}_{i,t}}}&=\frac{\partial{E}}{\partial{\mathbf{net}_{i,t}}}\frac{\partial{\mathbf{net}_{i,t}}}{\partial{\mathbf{b}_{i,t}}}\\ &=\delta_{i,t}\\\\ \frac{\partial{E}}{\partial{\mathbf{b}_{c,t}}}&=\frac{\partial{E}}{\partial{\mathbf{net}_{\tilde{c},t}}}\frac{\partial{\mathbf{net}_{\tilde{c},t}}}{\partial{\mathbf{b}_{c,t}}}\\ &=\delta_{\tilde{c},t}\\ \end{aligned} ∂bo,t∂E∂bf,t∂E∂bi,t∂E∂bc,t∂E=∂neto,t∂E∂bo,t∂neto,t=δo,t=∂netf,t∂E∂bf,t∂netf,t=δf,t=∂neti,t∂E∂bi,t∂neti,t=δi,t=∂netc~,t∂E∂bc,t∂netc~,t=δc~,t
下面是最终的偏置项梯度,即将各个时刻的偏置项梯度加在一起:
∂ E ∂ b o = ∑ j = 1 t δ o , j ∂ E ∂ b i = ∑ j = 1 t δ i , j ∂ E ∂ b f = ∑ j = 1 t δ f , j ∂ E ∂ b c = ∑ j = 1 t δ c ~ , j \begin{aligned} \frac{\partial{E}}{\partial{\mathbf{b}_o}}&=\sum_{j=1}^t\delta_{o,j}\\ \frac{\partial{E}}{\partial{\mathbf{b}_i}}&=\sum_{j=1}^t\delta_{i,j}\\ \frac{\partial{E}}{\partial{\mathbf{b}_f}}&=\sum_{j=1}^t\delta_{f,j}\\ \frac{\partial{E}}{\partial{\mathbf{b}_c}}&=\sum_{j=1}^t\delta_{\tilde{c},j}\\ \end{aligned} ∂bo∂E∂bi∂E∂bf∂E∂bc∂E=j=1∑tδo,j=j=1∑tδi,j=j=1∑tδf,j=j=1∑tδc~,j
对于 W f x W_{fx} Wfx、 W i x W_{ix} Wix、 W c x W_{cx} Wcx、 W o x W_{ox} Wox的权重梯度,只需要根据相应的误差项直接计算即可:
∂ E ∂ W o x = ∂ E ∂ n e t o , t ∂ n e t o , t ∂ W o x = δ o , t x t T ∂ E ∂ W f x = ∂ E ∂ n e t f , t ∂ n e t f , t ∂ W f x = δ f , t x t T ∂ E ∂ W i x = ∂ E ∂ n e t i , t ∂ n e t i , t ∂ W i x = δ i , t x t T ∂ E ∂ W c x = ∂ E ∂ n e t c ~ , t ∂ n e t c ~ , t ∂ W c x = δ c ~ , t x t T \begin{aligned} \frac{\partial{E}}{\partial{W_{ox}}}&=\frac{\partial{E}}{\partial{\mathbf{net}_{o,t}}}\frac{\partial{\mathbf{net}_{o,t}}}{\partial{W_{ox}}}\\ &=\delta_{o,t}\mathbf{x}_{t}^T\\\\ \frac{\partial{E}}{\partial{W_{fx}}}&=\frac{\partial{E}}{\partial{\mathbf{net}_{f,t}}}\frac{\partial{\mathbf{net}_{f,t}}}{\partial{W_{fx}}}\\ &=\delta_{f,t}\mathbf{x}_{t}^T\\\\ \frac{\partial{E}}{\partial{W_{ix}}}&=\frac{\partial{E}}{\partial{\mathbf{net}_{i,t}}}\frac{\partial{\mathbf{net}_{i,t}}}{\partial{W_{ix}}}\\ &=\delta_{i,t}\mathbf{x}_{t}^T\\\\ \frac{\partial{E}}{\partial{W_{cx}}}&=\frac{\partial{E}}{\partial{\mathbf{net}_{\tilde{c},t}}}\frac{\partial{\mathbf{net}_{\tilde{c},t}}}{\partial{W_{cx}}}\\ &=\delta_{\tilde{c},t}\mathbf{x}_{t}^T\\ \end{aligned} ∂Wox∂E∂Wfx∂E∂Wix∂E∂Wcx∂E=∂neto,t∂E∂Wox∂neto,t=δo,txtT=∂netf,t∂E∂Wfx∂netf,t=δf,txtT=∂neti,t∂E∂Wix∂neti,t=δi,txtT=∂netc~,t∂E∂Wcx∂netc~,t=δc~,txtT
以上就是LSTM的训练算法的全部公式。因为这里面存在很多重复的模式,仔细看看,会发觉并不是太复杂。
当然,LSTM存在着相当多的变体,读者可以在互联网上找到很多资料。因为大家已经熟悉了基本LSTM的算法,因此理解这些变体比较容易,因此本文就不再赘述了。
5 长短时记忆网络的实现
完整代码请参考GitHub: https://github.com/hanbt/learn_dl/blob/master/lstm.py (python2.7)
在下面的实现中,LSTMLayer的参数包括输入维度、输出维度、隐藏层维度,单元状态维度等于隐藏层维度。gate的激活函数为sigmoid函数,输出的激活函数为tanh。
5.1 激活函数的实现
我们先实现两个激活函数:sigmoid和tanh。
class SigmoidActivator(object):
def forward(self, weighted_input):
return 1.0 / (1.0 + np.exp(-weighted_input))
def backward(self, output):
return output * (1 - output)
class TanhActivator(object):
def forward(self, weighted_input):
return 2.0 / (1.0 + np.exp(-2 * weighted_input)) - 1.0
def backward(self, output):
return 1 - output * output
5.2 LSTM初始化
和前两篇文章代码架构一样,我们把LSTM的实现放在LstmLayer类中。
根据LSTM前向计算和方向传播算法,我们需要初始化一系列矩阵和向量。这些矩阵和向量有两类用途,一类是用于保存模型参数,例如 W f \mathbf{W}_f Wf、 W i \mathbf{W}_i Wi、 W c \mathbf{W}_c Wc、 W o \mathbf{W}_o Wo、 b f \mathbf{b}_f bf、 b i \mathbf{b}_i bi、 b c \mathbf{b}_c bc、 b o \mathbf{b}_o bo;另一类是保存各种中间计算结果,以便于反向传播算法使用,它们包括 h t \mathbf{h}_t ht、 f t \mathbf{f}_t ft、 i t \mathbf{i}_t it、 o t \mathbf{o}_t ot、 c t \mathbf{c}_t ct、 c ~ t \mathbf{\tilde{c}}_t c~t、 δ t \delta_t δt、 δ f , t \delta_{f,t} δf,t、 δ i , t \delta_{i,t} δi,t、 δ o , t \delta_{o,t} δo,t、 δ c ~ , t \delta_{\tilde{c},t} δc~,t,以及各个权重对应的梯度。
在构造函数的初始化中,只初始化了与forward计算相关的变量,与backward相关的变量没有初始化。这是因为构造LSTM对象的时候,我们还不知道它未来是用于训练(既有forward又有backward)还是推理(只有forward)。
class LstmLayer(object):
def __init__(self, input_width, state_width,
learning_rate):
self.input_width = input_width
self.state_width = state_width
self.learning_rate = learning_rate
# 门的激活函数
self.gate_activator = SigmoidActivator()
# 输出的激活函数
self.output_activator = TanhActivator()
# 当前时刻初始化为t0
self.times = 0
# 各个时刻的单元状态向量c
self.c_list = self.init_state_vec()
# 各个时刻的输出向量h
self.h_list = self.init_state_vec()
# 各个时刻的遗忘门f
self.f_list = self.init_state_vec()
# 各个时刻的输入门i
self.i_list = self.init_state_vec()
# 各个时刻的输出门o
self.o_list = self.init_state_vec()
# 各个时刻的即时状态c~
self.ct_list = self.init_state_vec()
# 遗忘门权重矩阵Wfh, Wfx, 偏置项bf
self.Wfh, self.Wfx, self.bf = (
self.init_weight_mat())
# 输入门权重矩阵Wfh, Wfx, 偏置项bf
self.Wih, self.Wix, self.bi = (
self.init_weight_mat())
# 输出门权重矩阵Wfh, Wfx, 偏置项bf
self.Woh, self.Wox, self.bo = (
self.init_weight_mat())
# 单元状态权重矩阵Wfh, Wfx, 偏置项bf
self.Wch, self.Wcx, self.bc = (
self.init_weight_mat())
def init_state_vec(self):
'''
初始化保存状态的向量
'''
state_vec_list = []
state_vec_list.append(np.zeros(
(self.state_width, 1)))
return state_vec_list
def init_weight_mat(self):
'''
初始化权重矩阵
'''
Wh = np.random.uniform(-1e-4, 1e-4,
(self.state_width, self.state_width))
Wx = np.random.uniform(-1e-4, 1e-4,
(self.state_width, self.input_width))
b = np.zeros((self.state_width, 1))
return Wh, Wx, b
5.3 前向计算的实现
forward方法实现了LSTM的前向计算:
def forward(self, x):
'''
根据式1-式6进行前向计算
'''
self.times += 1
# 遗忘门
fg = self.calc_gate(x, self.Wfx, self.Wfh,
self.bf, self.gate_activator)
self.f_list.append(fg)
# 输入门
ig = self.calc_gate(x, self.Wix, self.Wih,
self.bi, self.gate_activator)
self.i_list.append(ig)
# 输出门
og = self.calc_gate(x, self.Wox, self.Woh,
self.bo, self.gate_activator)
self.o_list.append(og)
# 即时状态
ct = self.calc_gate(x, self.Wcx, self.Wch,
self.bc, self.output_activator)
self.ct_list.append(ct)
# 单元状态
c = fg * self.c_list[self.times - 1] + ig * ct
self.c_list.append(c)
# 输出
h = og * self.output_activator.forward(c)
self.h_list.append(h)
def calc_gate(self, x, Wx, Wh, b, activator):
'''
计算门
'''
h = self.h_list[self.times - 1] # 上次的LSTM输出
net = np.dot(Wh, h) + np.dot(Wx, x) + b
gate = activator.forward(net)
return gate
从上面的代码我们可以看到,门的计算都是相同的算法,而门和 c ~ t \mathbf{\tilde{c}_t} c~t的计算仅仅是激活函数不同。因此我们提出了calc_gate方法,这样减少了很多重复代码。
5.4 反向传播算法的实现
backward方法实现了LSTM的反向传播算法。需要注意的是,与backword相关的内部状态变量是在调用backward方法之后才初始化的。这种延迟初始化的一个好处是,如果LSTM只是用来推理,那么就不需要初始化这些变量,节省了很多内存。
def backward(self, x, delta_h, activator):
'''
实现LSTM训练算法
'''
self.calc_delta(delta_h, activator)
self.calc_gradient(x)
算法主要分成两个部分,一部分使计算误差项:
def calc_delta(self, delta_h, activator):
# 初始化各个时刻的误差项
self.delta_h_list = self.init_delta() # 输出误差项
self.delta_o_list = self.init_delta() # 输出门误差项
self.delta_i_list = self.init_delta() # 输入门误差项
self.delta_f_list = self.init_delta() # 遗忘门误差项
self.delta_ct_list = self.init_delta() # 即时输出误差项
# 保存从上一层传递下来的当前时刻的误差项
self.delta_h_list[-1] = delta_h
# 迭代计算每个时刻的误差项
for k in range(self.times, 0, -1):
self.calc_delta_k(k)
def init_delta(self):
'''
初始化误差项
'''
delta_list = []
for i in range(self.times + 1):
delta_list.append(np.zeros(
(self.state_width, 1)))
return delta_list
def calc_delta_k(self, k):
'''
根据k时刻的delta_h,计算k时刻的delta_f、
delta_i、delta_o、delta_ct,以及k-1时刻的delta_h
'''
# 获得k时刻前向计算的值
ig = self.i_list[k]
og = self.o_list[k]
fg = self.f_list[k]
ct = self.ct_list[k]
c = self.c_list[k]
c_prev = self.c_list[k-1]
tanh_c = self.output_activator.forward(c)
delta_k = self.delta_h_list[k]
# 根据式9计算delta_o
delta_o = (delta_k * tanh_c *
self.gate_activator.backward(og))
delta_f = (delta_k * og *
(1 - tanh_c * tanh_c) * c_prev *
self.gate_activator.backward(fg))
delta_i = (delta_k * og *
(1 - tanh_c * tanh_c) * ct *
self.gate_activator.backward(ig))
delta_ct = (delta_k * og *
(1 - tanh_c * tanh_c) * ig *
self.output_activator.backward(ct))
delta_h_prev = (
np.dot(delta_o.transpose(), self.Woh) +
np.dot(delta_i.transpose(), self.Wih) +
np.dot(delta_f.transpose(), self.Wfh) +
np.dot(delta_ct.transpose(), self.Wch)
).transpose()
# 保存全部delta值
self.delta_h_list[k-1] = delta_h_prev
self.delta_f_list[k] = delta_f
self.delta_i_list[k] = delta_i
self.delta_o_list[k] = delta_o
self.delta_ct_list[k] = delta_ct
另一部分是计算梯度:
def calc_gradient(self, x):
# 初始化遗忘门权重梯度矩阵和偏置项
self.Wfh_grad, self.Wfx_grad, self.bf_grad = (
self.init_weight_gradient_mat())
# 初始化输入门权重梯度矩阵和偏置项
self.Wih_grad, self.Wix_grad, self.bi_grad = (
self.init_weight_gradient_mat())
# 初始化输出门权重梯度矩阵和偏置项
self.Woh_grad, self.Wox_grad, self.bo_grad = (
self.init_weight_gradient_mat())
# 初始化单元状态权重梯度矩阵和偏置项
self.Wch_grad, self.Wcx_grad, self.bc_grad = (
self.init_weight_gradient_mat())
# 计算对上一次输出h的权重梯度
for t in range(self.times, 0, -1):
# 计算各个时刻的梯度
(Wfh_grad, bf_grad,
Wih_grad, bi_grad,
Woh_grad, bo_grad,
Wch_grad, bc_grad) = (
self.calc_gradient_t(t))
# 实际梯度是各时刻梯度之和
self.Wfh_grad += Wfh_grad
self.bf_grad += bf_grad
self.Wih_grad += Wih_grad
self.bi_grad += bi_grad
self.Woh_grad += Woh_grad
self.bo_grad += bo_grad
self.Wch_grad += Wch_grad
self.bc_grad += bc_grad
print '-----%d-----' % t
print Wfh_grad
print self.Wfh_grad
# 计算对本次输入x的权重梯度
xt = x.transpose()
self.Wfx_grad = np.dot(self.delta_f_list[-1], xt)
self.Wix_grad = np.dot(self.delta_i_list[-1], xt)
self.Wox_grad = np.dot(self.delta_o_list[-1], xt)
self.Wcx_grad = np.dot(self.delta_ct_list[-1], xt)
def init_weight_gradient_mat(self):
'''
初始化权重矩阵
'''
Wh_grad = np.zeros((self.state_width,
self.state_width))
Wx_grad = np.zeros((self.state_width,
self.input_width))
b_grad = np.zeros((self.state_width, 1))
return Wh_grad, Wx_grad, b_grad
def calc_gradient_t(self, t):
'''
计算每个时刻t权重的梯度
'''
h_prev = self.h_list[t-1].transpose()
Wfh_grad = np.dot(self.delta_f_list[t], h_prev)
bf_grad = self.delta_f_list[t]
Wih_grad = np.dot(self.delta_i_list[t], h_prev)
bi_grad = self.delta_f_list[t]
Woh_grad = np.dot(self.delta_o_list[t], h_prev)
bo_grad = self.delta_f_list[t]
Wch_grad = np.dot(self.delta_ct_list[t], h_prev)
bc_grad = self.delta_ct_list[t]
return Wfh_grad, bf_grad, Wih_grad, bi_grad, \
Woh_grad, bo_grad, Wch_grad, bc_grad
5.5 梯度下降算法的实现
下面是用梯度下降算法来更新权重:
def update(self):
'''
按照梯度下降,更新权重
'''
self.Wfh -= self.learning_rate * self.Whf_grad
self.Wfx -= self.learning_rate * self.Whx_grad
self.bf -= self.learning_rate * self.bf_grad
self.Wih -= self.learning_rate * self.Whi_grad
self.Wix -= self.learning_rate * self.Whi_grad
self.bi -= self.learning_rate * self.bi_grad
self.Woh -= self.learning_rate * self.Wof_grad
self.Wox -= self.learning_rate * self.Wox_grad
self.bo -= self.learning_rate * self.bo_grad
self.Wch -= self.learning_rate * self.Wcf_grad
self.Wcx -= self.learning_rate * self.Wcx_grad
self.bc -= self.learning_rate * self.bc_grad
5.6 梯度检查的实现
和RecurrentLayer一样,为了支持梯度检查,我们需要支持重置内部状态:
def reset_state(self):
# 当前时刻初始化为t0
self.times = 0
# 各个时刻的单元状态向量c
self.c_list = self.init_state_vec()
# 各个时刻的输出向量h
self.h_list = self.init_state_vec()
# 各个时刻的遗忘门f
self.f_list = self.init_state_vec()
# 各个时刻的输入门i
self.i_list = self.init_state_vec()
# 各个时刻的输出门o
self.o_list = self.init_state_vec()
# 各个时刻的即时状态c~
self.ct_list = self.init_state_vec()
最后,是梯度检查的代码:
def data_set():
x = [np.array([[1], [2], [3]]),
np.array([[2], [3], [4]])]
d = np.array([[1], [2]])
return x, d
def gradient_check():
'''
梯度检查
'''
# 设计一个误差函数,取所有节点输出项之和
error_function = lambda o: o.sum()
lstm = LstmLayer(3, 2, 1e-3)
# 计算forward值
x, d = data_set()
lstm.forward(x[0])
lstm.forward(x[1])
# 求取sensitivity map
sensitivity_array = np.ones(lstm.h_list[-1].shape,
dtype=np.float64)
# 计算梯度
lstm.backward(x[1], sensitivity_array, IdentityActivator())
# 检查梯度
epsilon = 10e-4
for i in range(lstm.Wfh.shape[0]):
for j in range(lstm.Wfh.shape[1]):
lstm.Wfh[i,j] += epsilon
lstm.reset_state()
lstm.forward(x[0])
lstm.forward(x[1])
err1 = error_function(lstm.h_list[-1])
lstm.Wfh[i,j] -= 2*epsilon
lstm.reset_state()
lstm.forward(x[0])
lstm.forward(x[1])
err2 = error_function(lstm.h_list[-1])
expect_grad = (err1 - err2) / (2 * epsilon)
lstm.Wfh[i,j] += epsilon
print 'weights(%d,%d): expected - actural %.4e - %.4e' % (
i, j, expect_grad, lstm.Wfh_grad[i,j])
return lstm
我们只对做了检查,读者可以自行增加对其他梯度的检查。下面是某次梯度检查的结果:

6 GRU
前面我们讲了一种普通的LSTM,事实上LSTM存在很多变体,许多论文中的LSTM都或多或少的不太一样。在众多的LSTM变体中,GRU (Gated Recurrent Unit)也许是最成功的一种。它对LSTM做了很多简化,同时却保持着和LSTM相同的效果。因此,GRU最近变得越来越流行。
GRU对LSTM做了两个大改动:
- 将输入门、遗忘门、输出门变为两个门:更新门(Update Gate) z t \mathbf{z}_t zt和重置门(Reset
Gate) r t \mathbf{r}_t rt。 - 将单元状态与输出合并为一个状态: h h h。
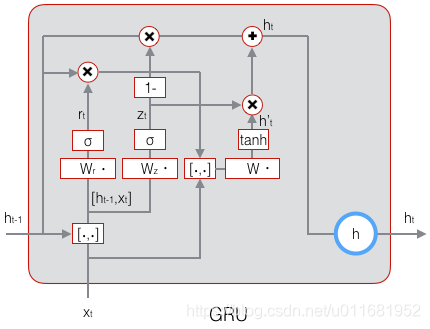
GRU的前向计算公式为:
z t = σ ( W z ⋅ [ h t − 1 , x t ] ) r t = σ ( W r ⋅ [ h t − 1 , x t ] ) h ~ t = tanh ( W ⋅ [ r t ∘ h t − 1 , x t ] ) h = ( 1 − z t ) ∘ h t − 1 + z t ∘ h ~ t \begin{aligned} \mathbf{z}_t&=\sigma(W_z\cdot[\mathbf{h}_{t-1},\mathbf{x}_t])\\ \mathbf{r}_t&=\sigma(W_r\cdot[\mathbf{h}_{t-1},\mathbf{x}_t])\\ \mathbf{\tilde{h}}_t&=\tanh(W\cdot[\mathbf{r}_t\circ\mathbf{h}_{t-1},\mathbf{x}_t])\\ \mathbf{h}&=(1-\mathbf{z}_t)\circ\mathbf{h}_{t-1}+\mathbf{z}_t\circ\mathbf{\tilde{h}}_t \end{aligned} ztrth~th=σ(Wz⋅[ht−1,xt])=σ(Wr⋅[ht−1,xt])=tanh(W⋅[rt∘ht−1,xt])=(1−zt)∘ht−1+zt∘h~t
下图是GRU的示意图:
GRU的训练算法比LSTM简单一些,留给读者自行推导,本文就不再赘述了。
7 小结
至此,LSTM——也许是结构最复杂的一类神经网络——就讲完了,相信拿下前几篇文章的读者们搞定这篇文章也不在话下吧!现在我们已经了解循环神经网络和它最流行的变体——LSTM,它们都可以用来处理序列。但是,有时候仅仅拥有处理序列的能力还不够,还需要处理比序列更为复杂的结构(比如树结构),这时候就需要用到另外一类网络:递归神经网络(Recursive Neural Network),巧合的是,它的缩写也是RNN。在下一篇文章中,我们将介绍递归神经网络和它的训练算法。现在,漫长的烧脑暂告一段落,休息一下吧:)

8 参考资料
CS224d: Deep Learning for Natural Language Processing
Understanding LSTM Networks
LSTM Forward and Backward Pass

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐


 7
7 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)