roboticstoolbox.plot不显示图像
修改DFbot.plot(block=True),控制Matplotlib 的窗口阻塞行为。在vscode运行,一闪而过,不显示。
·
from roboticstoolbox import *
from spatialmath import *
from math import pi
import numpy as np
DFbot = DHRobot(
[
RevoluteDH(d=0.04145, alpha=np.pi/2, qlim=np.array([pi, pi])),
RevoluteDH(a=-0.08285, qlim=np.array([-pi, pi])),
RevoluteDH(a=-0.08285, qlim=np.array([-pi, pi])),
RevoluteDH(alpha=-pi, qlim=np.array([-pi, pi])),
RevoluteDH(d=0.11, qlim=np.array([-pi, 3/2 * pi])),
],
name = "DFbot"
)
print(DFbot)
# 绘制并保持窗口
DFbot.plot(np.array([0, pi/3, 0, 0, 0]))在vscode运行,一闪而过,不显示。
修改DFbot.plot(block=True),控制Matplotlib 的窗口阻塞行为
from roboticstoolbox import *
from spatialmath import *
from math import pi
import numpy as np
DFbot = DHRobot(
[
RevoluteDH(d=0.04145, alpha=np.pi/2, qlim=np.array([pi, pi])),
RevoluteDH(a=-0.08285, qlim=np.array([-pi, pi])),
RevoluteDH(a=-0.08285, qlim=np.array([-pi, pi])),
RevoluteDH(alpha=-pi, qlim=np.array([-pi, pi])),
RevoluteDH(d=0.11, qlim=np.array([-pi, 3/2 * pi])),
],
name = "DFbot"
)
print(DFbot)
# 绘制并保持窗口
# 阻塞程序
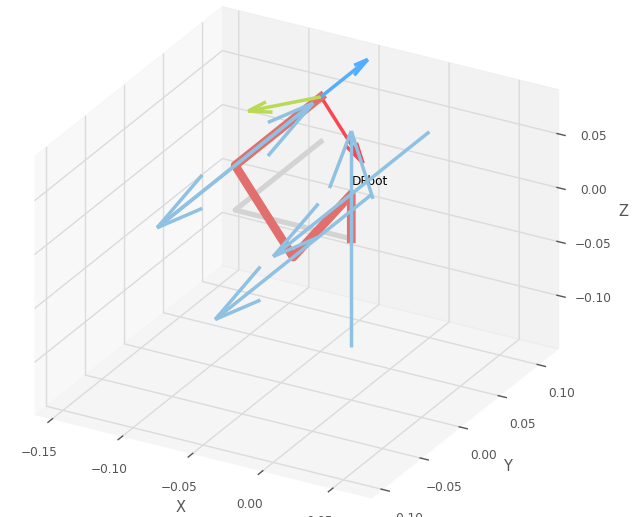
DFbot.plot(np.array([0, pi/3, -pi*2/3, 0, 0]),block=True) DHRobot: DFbot, 5 joints (RRRRR), dynamics, standard DH parameters
┌─────┬─────────┬──────────┬─────────┬─────────┬────────┐
│ θⱼ │ dⱼ │ aⱼ │ ⍺ⱼ │ q⁻ │ q⁺ │
├─────┼─────────┼──────────┼─────────┼─────────┼────────┤
│ q1 │ 0.04145 │ 0 │ 90.0° │ 180.0° │ 180.0° │
│ q2 │ 0 │ -0.08285 │ 0.0° │ -180.0° │ 180.0° │
│ q3 │ 0 │ -0.08285 │ 0.0° │ -180.0° │ 180.0° │
│ q4 │ 0 │ 0 │ -180.0° │ -180.0° │ 180.0° │
│ q5 │ 0.11 │ 0 │ 0.0° │ -180.0° │ 270.0° │
└─────┴─────────┴──────────┴─────────┴─────────┴────────┘
┌──┬──┐
└──┴──┘

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 3
3 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)