EVO 轨迹
python版本和pip版本(python3.0之后的版本对应pip3)
·
一、Ubuntu20.04 安装evo
1. 首先查看自己的python版本
python版本和pip版本(python3.0之后的版本对应pip3)
我的是python 3.8
cd /usr/bin #进到python可执行目录
ll -a|grep python3 #查看python3的版本
ll -a|grep pip3 #查看pip3的版本
安装pip3
sudo apt-get install python3-pip版本

2. 安装EVO
(1) 下载EVO源码
git clone https://github.com/MichaelGrupp/evo.git(2) 安装
sudo pip install evo --upgrade --no-binary evo
(3) 测试安装成功
evo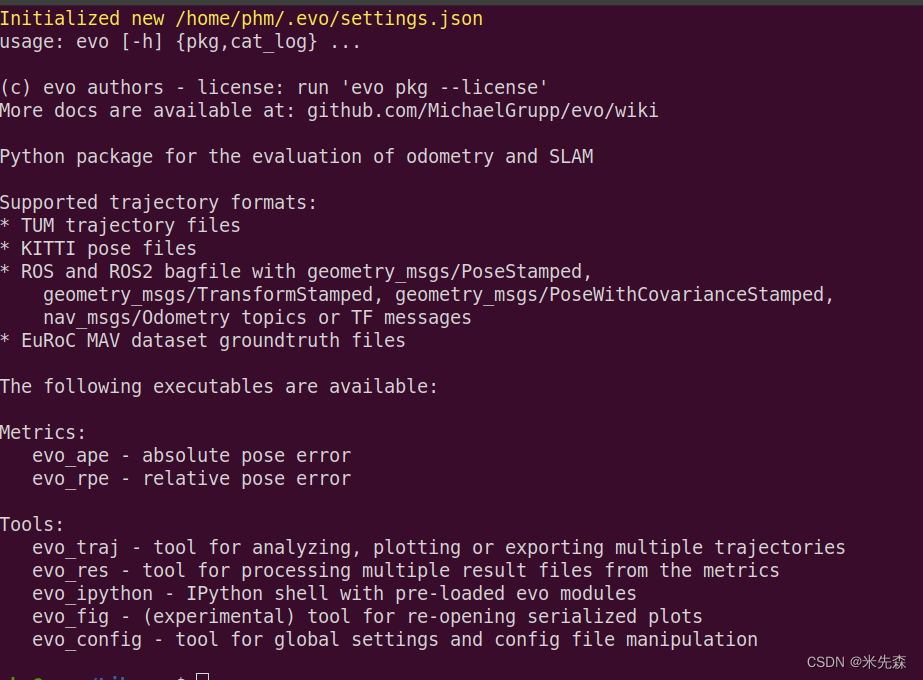
二、LIO-SAM 轨迹评估
1. 查看数据包的topic信息
rosbag info *.bag
图片
其中的gps数据,里程计数据,IMU数据分别是。。。。。
2. 根据topic 信息修改订阅的代码

3. 运行代码
在 室内外建图的课程中有订阅轨迹的代码,订阅gps 和 订阅里程计、gps 的代码
这里用的是odom_subscriber.cpp文件。。 需要跟测试的代码放在一个src 文件夹目录下面。
代码:
catkin_make
source devel/setup.bash打开四个终端界面
1、先启动ROS
roscore2、 启动订阅信息的节点
rosrun odom_subscriber front_end_node需要在front_end_flow.cpp 文件里面修改订阅的topic 信息,和文件保存的路径。
3、运行框架代码
roslaunch lio_sam run.launch4、运行KITTI 数据集
rosbag play kitti_2011_09_30_drive_0018_synced.bag
有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 0
0 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)