19-2 ACC GB/T 20608与ISO15622法规对比分析
本专题由深圳季连AIgraphX李博及团队出品,主要讲解ACC自适应巡航控制系统的开发与仿真测试。具体说来,包括ACC标准/法规分析、系统需求、系统架构、软件需求、软件架构、算法建模、验证场景分析、仿真实验搭建等内容。
本专题由深圳季连AIgraphX李博及团队出品,主要讲解ACC自适应巡航控制系统的开发与仿真测试。具体说来,包括ACC标准/法规分析、系统需求、系统架构、软件需求、软件架构、算法建模、验证场景分析、仿真实验搭建等内容。
1. Introduction/简介
1.1 ISO15622 Introduction
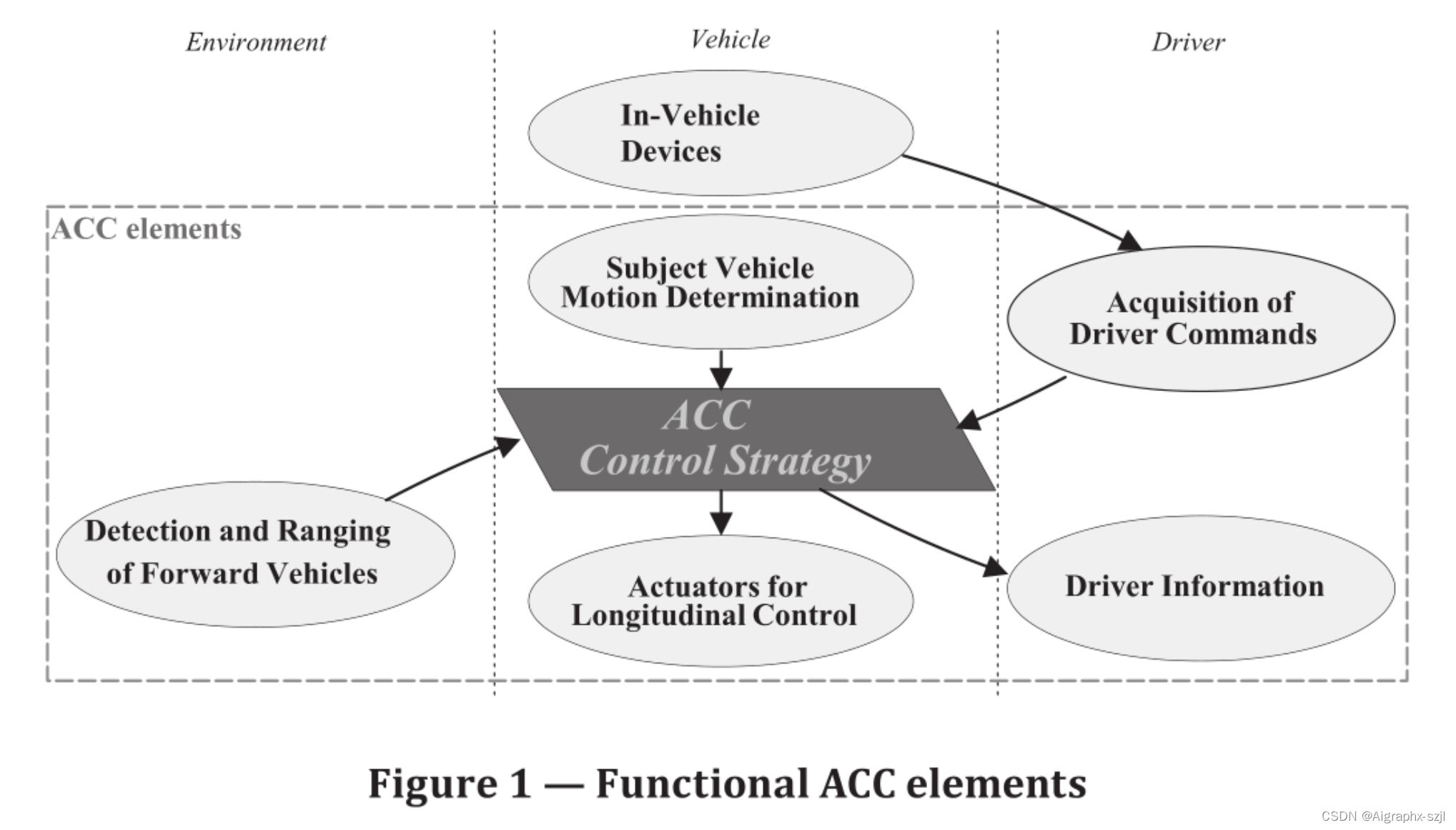
The main system function of Adaptive Cruise Control (ACC) is to control vehicle speed adaptively to a forward vehicle by using information about: (1) distance to forward vehicles, (2) the motion of the subject (ACC equipped) vehicle and (3) driver commands (see Figure 1). Based upon the information acquired, the controller (identified as "ACC control strategy" in Figure 1) sends commands to actuators for carrying out its longitudinal control strategy and it also sends status information to the driver. Optionally, the driver may choose to have the ACC use set speed advice from in-vehicle devices. 自适应巡航控制系统(ACC)的主要系统功能是利用以下信息自适应地控制车速,以适应前方车辆:(1)到前方车辆的距离,(2)本车(配备ACC的)车辆的运动,以及(3)驾驶员操作指令(见图1)。基于所获取的信息,控制器(在图1中标识为“ACC控制策略”)向执行其纵向控制策略的制动器发送命令,并向驾驶员发送状态信息。可选地,驾驶员可以选择让ACC使用来自车载设备的设置速度建议。
The goal of ACC is a partial automation of the longitudinal vehicle control and the reduction of the workload of the driver with the aim of supporting and relieving the driver in a convenient manner. The generic ACC system comprehends two classes: Full Speed Range ACC (FSRA) and Limited Speed Range ACC (LSRA). ACC的目标是实现车辆纵向控制部分自动化,减少驾驶员的工作量,目的是为驾驶员提供方便的支持。通用的ACC系统包含两类:全速范围ACC(FSRA)和限速范围ACC(LSRA)。
This document can be used as a system level standard by other standards, which extend the ACC to a more detailed standard, e.g. for specific detection and ranging sensor concepts or higher level of functionality. Therefore, issues like specific requirements for the detection and ranging sensor function and performance or communication links for co-operative solutions will not be considered here. 本文档可被其他标准用作系统级标准,这些标准将ACC扩展为更详细的标准。例如,用于特定的探测和测距传感器概念或更高级别的功能。因此,这里将不考虑对探测和测距传感器功能和性能的具体要求,或合作解决方案的通信链路等问题。
1.2 GB/T 20608 前言
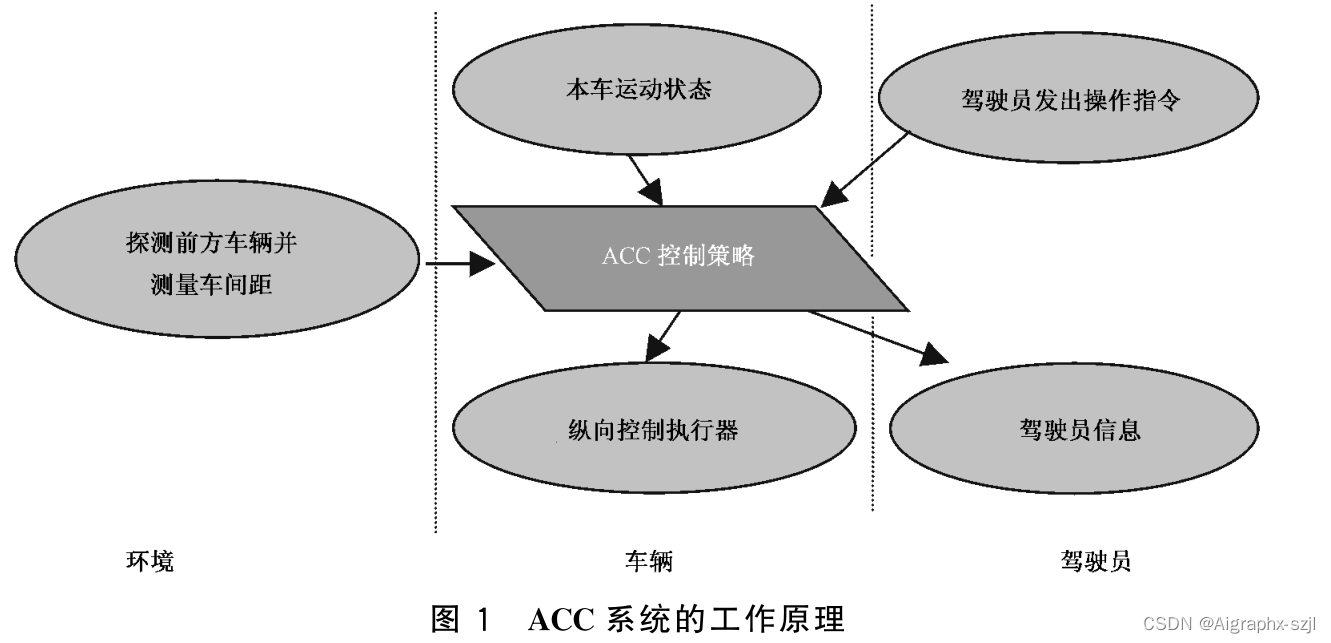
自适应巡航控制(ACC)系统的主要功能是基于特定的信息控制车速与前方车辆运动状态相适应,这些信息包括:(1)与前车间的距离;(2)本车的运动状态;(3)驾驶员的操作指令,如图1。基于上述信息,控制器(图1中称为的“ACC控制策略”)发送控制指令执行纵向控制,同时将状态信息提供给驾驶员。
ACC的目的是通过对车辆纵向运动进行自动控制,以减轻驾驶员的疲劳强度,保证行车安全,并通过方便的方式为驾驶员提供辅助支持
本标准可被其它标准作为基本标准采用,例如,有关探测传感器及其扩展功能等,这将有助于使ACC相关标准更加详尽。因此,用于协调合作解决方案的探测传感器功能、性能及通讯方面的特殊要求将不在本标准的讨论之列。
2. Scope/范围
2.1 ISO15622 Scope
This document contains the basic control strategy, minimum functionality requirements, basic driver interface elements, minimum requirements for diagnostics and reaction to failure, and performance test procedures for Adaptive Cruise Control (ACC) systems. 本文档包含自适应巡航控制(ACC)系统的基本控制策略、最低功能要求、与驾驶员交互的基本信息、故障诊断和失效反应的最低要求以及性能测试程序。
ACC systems are realised as either Eull Speed Range Adaptive Cruise Control (FSRA) systems or .Limited Speed Range Adaptive Cruise Control (LSRA) systems. LSRA systems are further distinguished into two types, requiring manual or automatic clutch. Adaptive Cruise Control is fundamentally intended to provide longitudinal control of equipped vehicles while travelling on highways (roads where nonmotorized vehicles and pedestrians are prohibited) under free-flowing and for FSRA-type systems also for congested traffic conditions. ACC can be augmented with other capabilities, such as forward obstacle warning. For FSRA-type systems,the system will attempt to stop behind an already tracked vehicle within its limited deceleration capabilities and will be able to start again after the driver has input a request to the system to resume the journey from standstill. The system is not required to react to stationary or slow moving objects. 自适应巡航控制系统(ACC)可分为全速(FSRA)和限速(LSRA)两种。其中限速LSRA又分为两类,即车辆配置手动或自动离合器。自适应巡航控制的基本目的是在高速公路(禁止非机动车和行人通行的道路)上自由行驶时,为本车提供纵向控制。对于FSRA类型的系统也适用于拥堵的交通状况。ACC还可以扩展到其他功能,如前方障碍物警告。对于FSRA类型的系统,系统能试图在其有限的减速能力范围内停在目标车辆后面,并在驾驶员向系统输入从静止状态恢复行驶的请求后能够再次启动。系统不需要对静止或缓慢移动的物体作出反应。
2.2 GB/T 20608 范围
本标准规定了自适应巡航控制(以下简称 ACC)系统的基本控制策略、最低的功能要求、基本的人机交互界面、故障诊断及处理的最低要求以及性能检测规程。
本标准适用于 ACC系统的性能检测。
3. Classification/分类
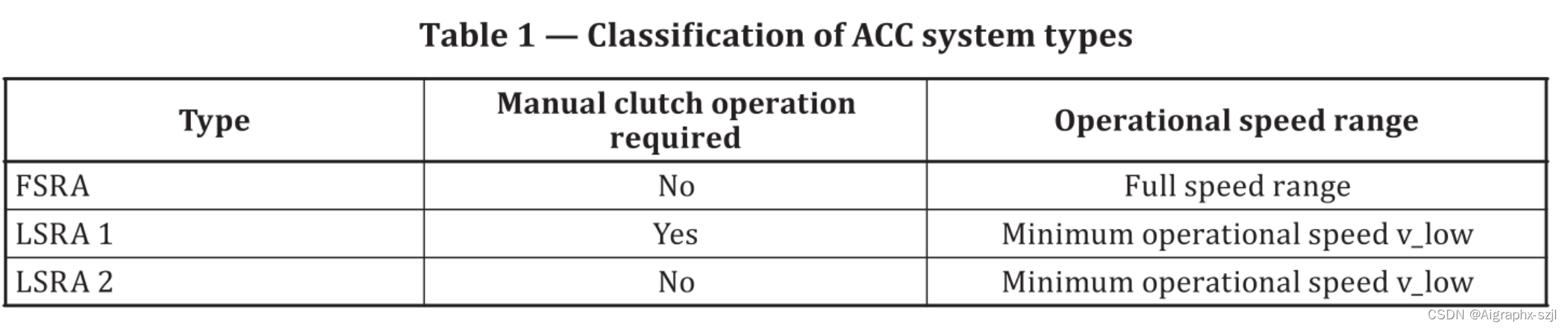
3.1 ISO15622 Type of ACC systems
Different configurations of actuators for longitudinal cont rol result in very different system behaviour. Therefore, based on the two different ACC classes, three types of ACC systems are addressed in this document. 执行纵向控制的不同配置执行器会有不同的系统行为。因此,根据FSRA、LSRA两种不同的ACC,本文将讨论三种类型的ACC系统。
The deceleration capability of the ACC system shall be clearly stated in the vehicle owner's manual. All types incorporate active brake control. In case of active brake intervention in vehicles with a clutch pedal (type LSRA 1) the driver shall be informed clearly and early about a potential conflict between brake and engine idle control, if the clutch cannot be disengaged automatically. A practicable and unambiguous handing-over procedure shall be provided for the driver. ACC系统的减速能力应在车主使用手册中明确说明。所有类型的车辆集成了主动制动控制功能。在带离合器踏板的车辆(LSRA 1型)采用主动制动干预时,如果离合器不能自动分离,应及早明确告知驾驶员制动和发动机怠速控制之间的潜在冲突,同时为驾驶员提供一个切实可行且明确的接管流程。
3.2 GB/T ACC系统分类
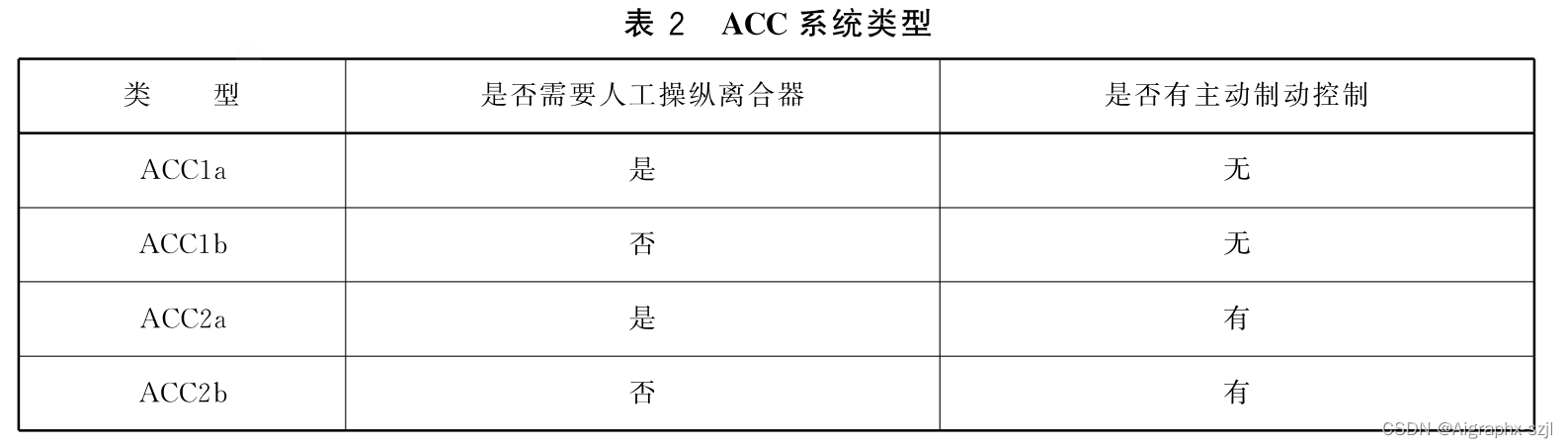
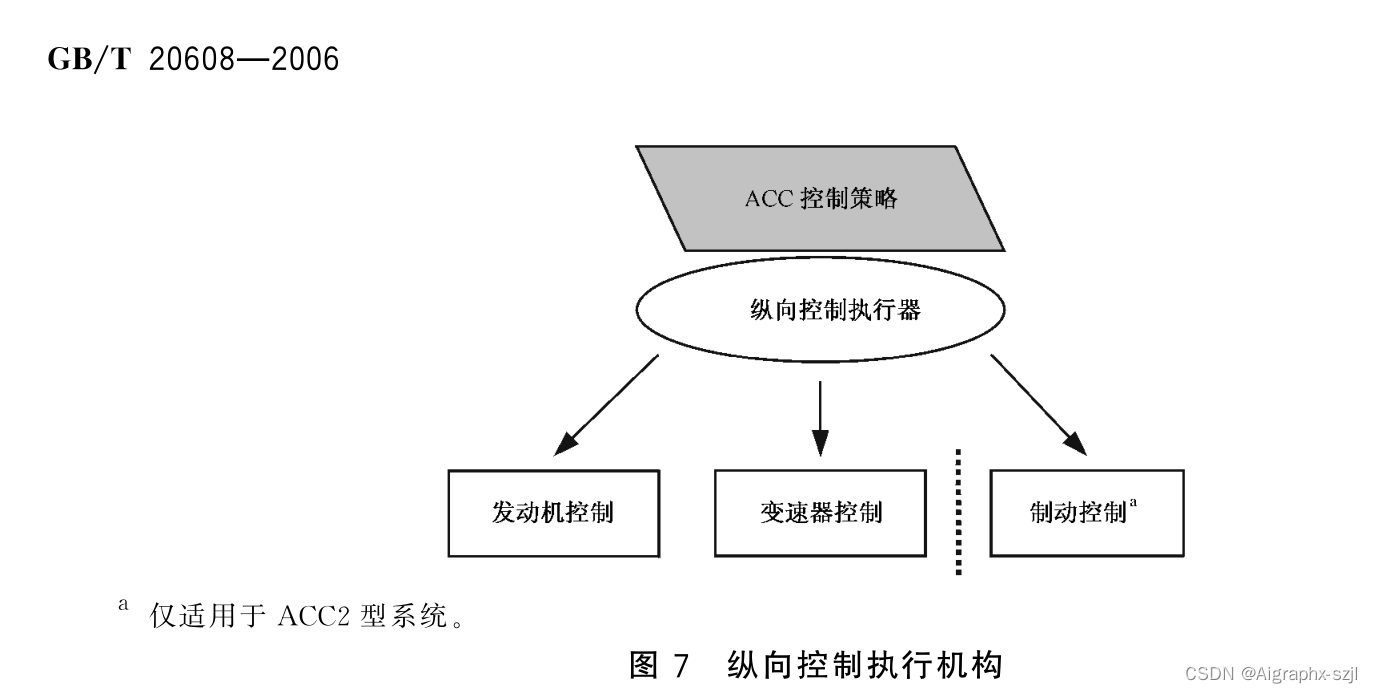
3.2.1 根据纵向控制执行器结构分类
ACC 系统根据纵向控制执行器结构的不同分为 4 种类型:
当配备离合器的车辆进行主动制动控制时,如果离合器无法自动分离,应将制动和发动机怠速控制间的潜在冲突及早提示给驾驶员,并为驾驶员提供一种明确且可实行的切换方案。
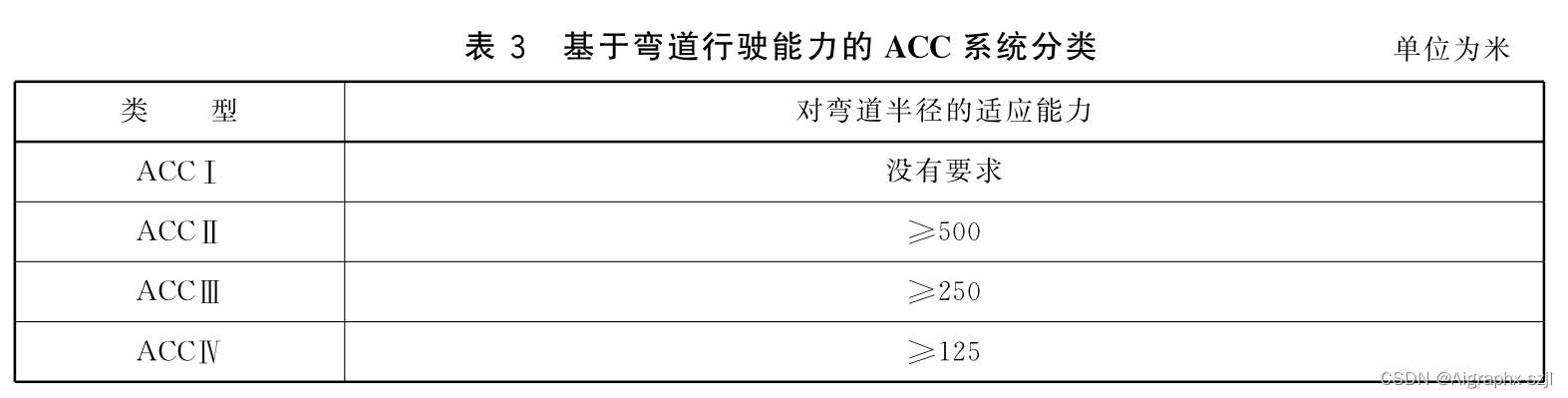
3.2.2 根据弯道行驶适应能力分类
ACC 系统根据对弯道行驶的适应能力分为 4 种类型:
4. Requirements/需求
4.1 ISO 15622 Basic control strategy/基本控制策略
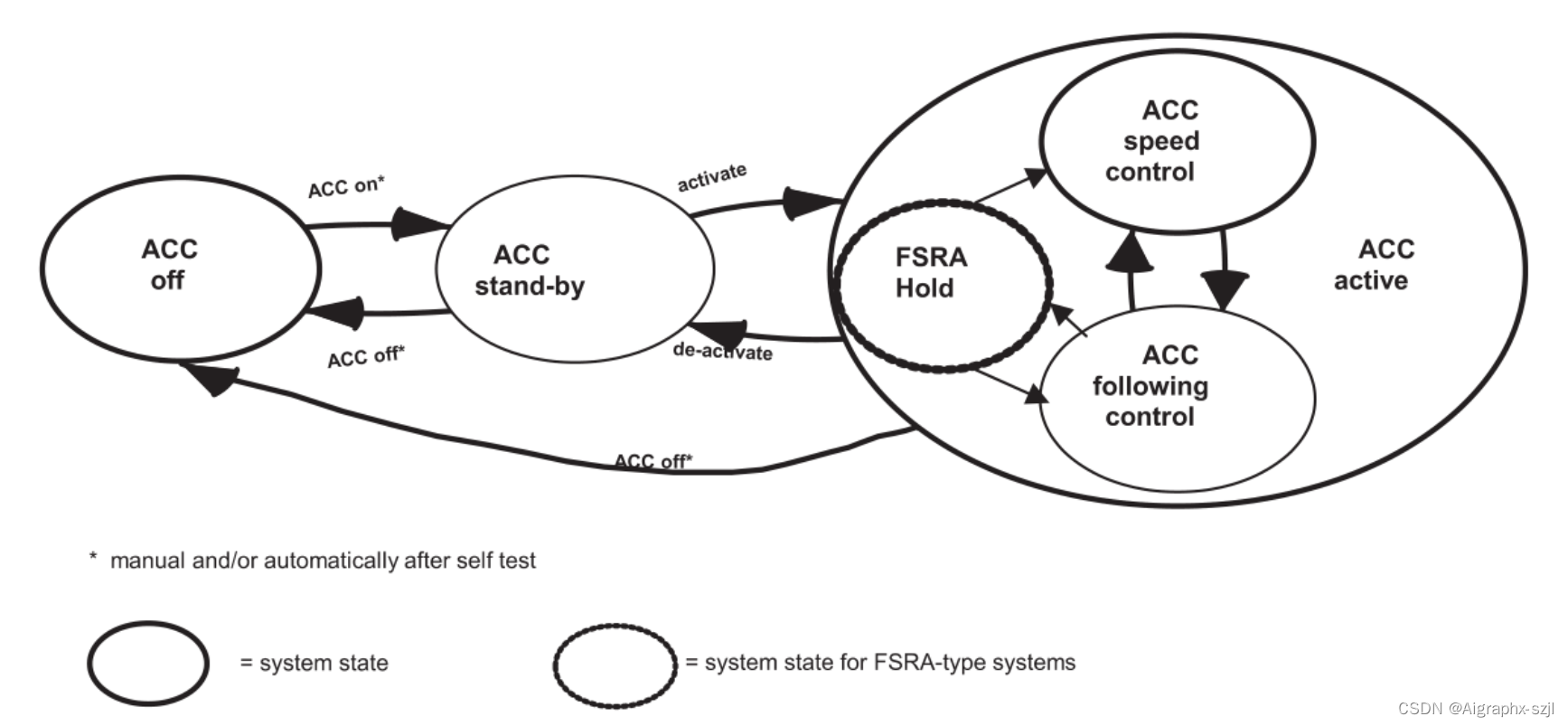
ACC systems shall, as a minimum, provide the following control strategy and state transitions. The following constitutes the fundamental behaviour of ACC systems.ACC系统至少应具备如下的控制策略和状态转换,以下是ACC系统的基本行为:
—When the ACC is active, the vehicle speed shall be controlled automatically either to maintain a clearance to a forward vehicle, or to maintain the set speed, whichever speed is lower. the change between these two control tnodes is made automatically by the ACC system.当ACC激活时,应自动控制车速,或保持与前车的间隙,或保持设定车速,以车速较低者为准。这两个控制节点之间的变化由ACC系统自动完成。
—The steady-state clearance may be either self-adjusting by the system or adjustable by the driver.稳态跟车时距可以由系统自行调节,也可以由驾驶员调节。
—If there is more than one forward vehicle, the one to be followed shall be selected automatically.如果有一个以上的前车,应自动选择被跟踪的车辆。
—Only for FSRA-type: The state shall change from following control to hold state within a time period not to exceed 3 sec after the subject vehicle has come to a stop.仅适用于FSRA类型,在目标车辆停止后不超过3秒的时间内,从跟随控制状态转为保持状态。
—Only for FSRA-type: In "Hold" state, automatic brake control shall be accomplished for keeping the subject vehicle stationary.仅适用于FSRA类型,在 "保持 "状态下,应实现自动控制制动,使本车保持静止。
—Only for LSRA-type: The transition from "ACC stand-by" to "ACC active" shall be inhibited if the subject vehicle's speed is below a minimum operational speed, Vlow. Additionally, if the vehicle's speed drops below Vlow while the system is in the "ACC active" state, automatic acceleration shall be inhibite Optionally, the ACC system may drop from "ACC active" to "ACC stand-by".仅适用于LSRA型,如果目标车辆的车速低于最低运行速度Vlow,则从 "ACC stand-by "到 "ACC active "的过渡将被抑制;此外,如果系统处于 "ACC active "状态时车辆的车速低于Vlow,则自动加速将被抑制,ACC系统可能从ACC active变到ACC stand by状态。
手动切换条件描述了启用/关闭ACC功能的开关。发生故障时,系统可强制自动关闭开关。
4.2 GB/T 20608 基本控制策略
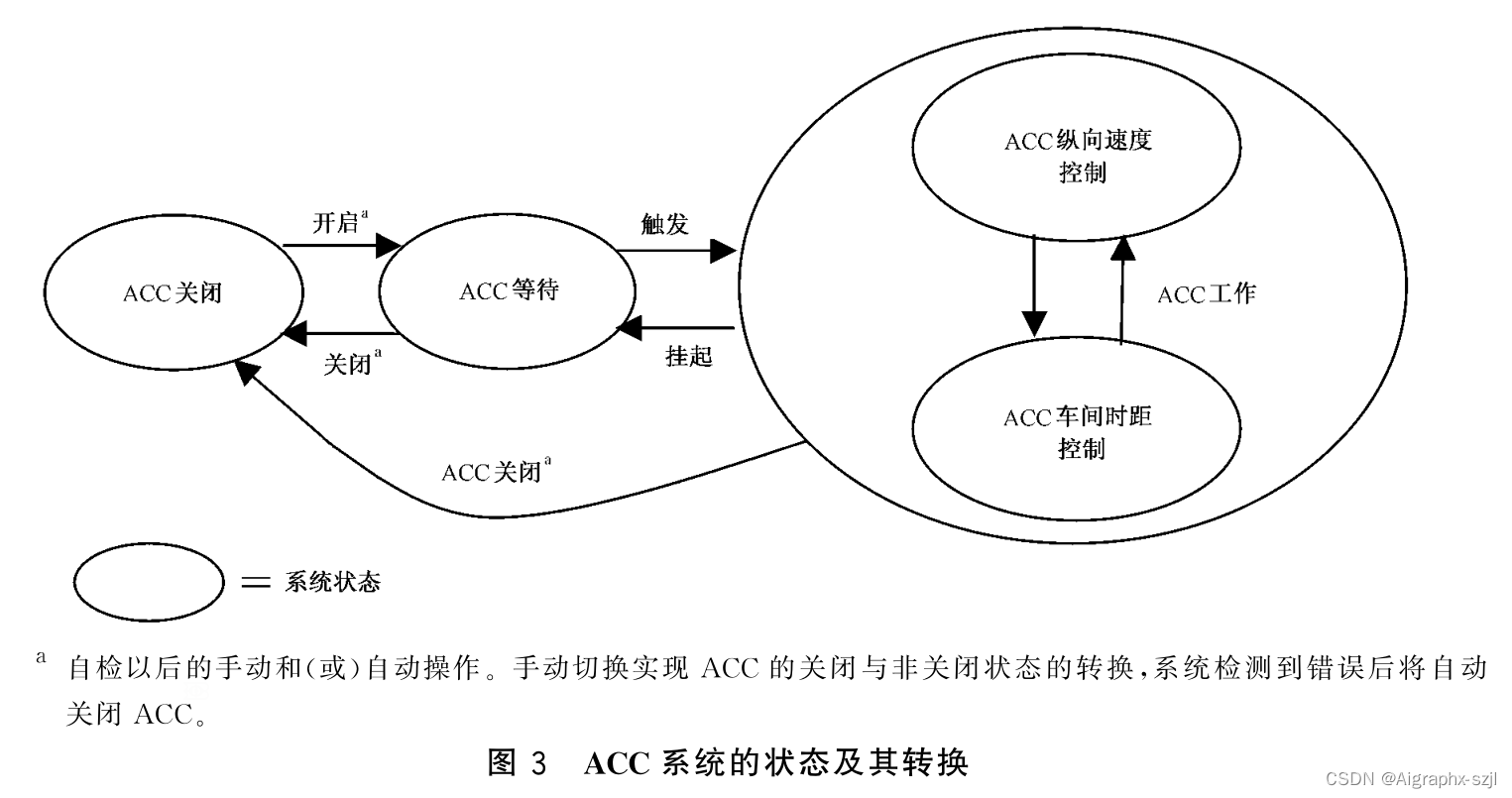
4.2.1 ACC系统状态
ACC系统的状态可分为3种:ACC关闭状态、ACC等待状态和ACC工作状态。
4.2.2 ACC关闭状态
直接的操作动作均不能触发ACC系统
4.2.3 ACC等待状态
ACC系统没有参与车辆的纵向控制,但可随时被驾驶员触发而进入工作状态
4.2.4 ACC工作状态
系统控制本车的速度和(或)车间时距
4.2.5 基本控制策略
以下控制功能及状态切换功能是对ACC系统的最低要求,并构成其基本的系统行为:
—当ACC处于工作状态时,本车通过对速度的自动控制来与前车保持一定的车间时距或预先的设定速度(以二者中速度低者为准)。这两种控制模式之间的转换可由ACC系统自动完成;
—稳定状态的车间时距可由系统自动调节或由驾驶员调节;
—当本车的速度低于最低工作速度Vlow时,应禁止由“ACC等待状态”向“ACC工作状态”的转换。此外,如果系统处于“ACC工作状态”,并且速度低于Vlow时,自动加速功能应被禁止,此时ACC系统可由“ACC工作状态”自动转换为“ACC等待状态”;
—如果前方存在多车辆,则ACC系统应该自动选择跟随本车车道内最接近的前车。
4.3 ISO 15622 Functionality/功能
4.3.1 Control modes/控制模式
The transition between the control modes (following controlled or speed controlled) shall be made automatically.控制模式(跟随控制或速度控制)之间应自动过渡。
4.3.2 Stationary or slow moving targets/静止或缓慢移动的目标
Generally, it is not a requirement that an ACC system is designed to respond to the presenceof stationary or slow moving targets. If the system is designed not to respond to stationary targets the driver shall be informed at least by a st atement in the vehicle owner's manual.一般来说,并不要求ACC系统对静止或缓慢移动的目标作出反应。如果系统的设计不能对静止的目标作出反应,则至少应在车主使用手册中说明。
Systems of FSRA-type will and systems of LSRA-type may attempt to stop behind an already tracked and stopping vehicle within their limited deceleration capabilities.对于FSRA,系统可能会在其有限的减速能力范围内尝试在已经被跟踪和停止的目标车辆后停车。
4.3.3 Following capability/跟随能力
4.3.3.1 General/通用要求
Tmin shall be the minimum selectable time gap for following control mode under steady-state conditions for all speeds v. Tmin shall be greater than or equal to 0.8s.Tmin应是所有速度的稳态条件下跟随控制模式的最小可选择时隙v. Tmin应大于或等于0.8s。
At least one time gap setting τ in the range of 1.5 s to 2.2 s shall be provided for speeds higher than 8 m/s.速度高于8m/s时,跟车时距T至少应设置在1.5s~2.2s范围内。
Under steady-state conditions the minimum clearance shall be MAX(Cmin, Tmin*v).在稳态条件下,最小间隙应为MAX(Cmin,Tmin*v)。
Under transient conditions, the clearance may temporarily fall below the minimum clearance. If such a situation occurs, the system shall adjust the clearance to attain the desired clearance.在瞬时条件下,跟车时距可能暂时低于最小跟车时距。如果出现这种情况,系统应调整跟车间距,以达到理想的跟车间距。
For all FSRA-type systems and those LSRA type systems which attempt to stop behind a stopping vehicle : As a minimum requirement the system shall be able, starting from steady state following, to stop behind a gradually stopping vehicle which is braking with the acceleration astopping at a speed below vstopping. 适用于所有FSRA,LSRA类型,这些系统试图在停止的车辆后面停止。作为最低要求,该系统应能从稳态跟随开始,以低于Vstopping的速度在加速度astopping制动下逐渐停止的车辆后面停止。
vstop = 10m/s
astop = -2.5m/s^2
The ACC shall have detection range, target discrimination and curve capabilities as specified below.ACC应具有以下规定的探测范围、目标识别和曲线能力。
4.3.3.2 Detection range on straight roads/直线道路上的距离探测能力

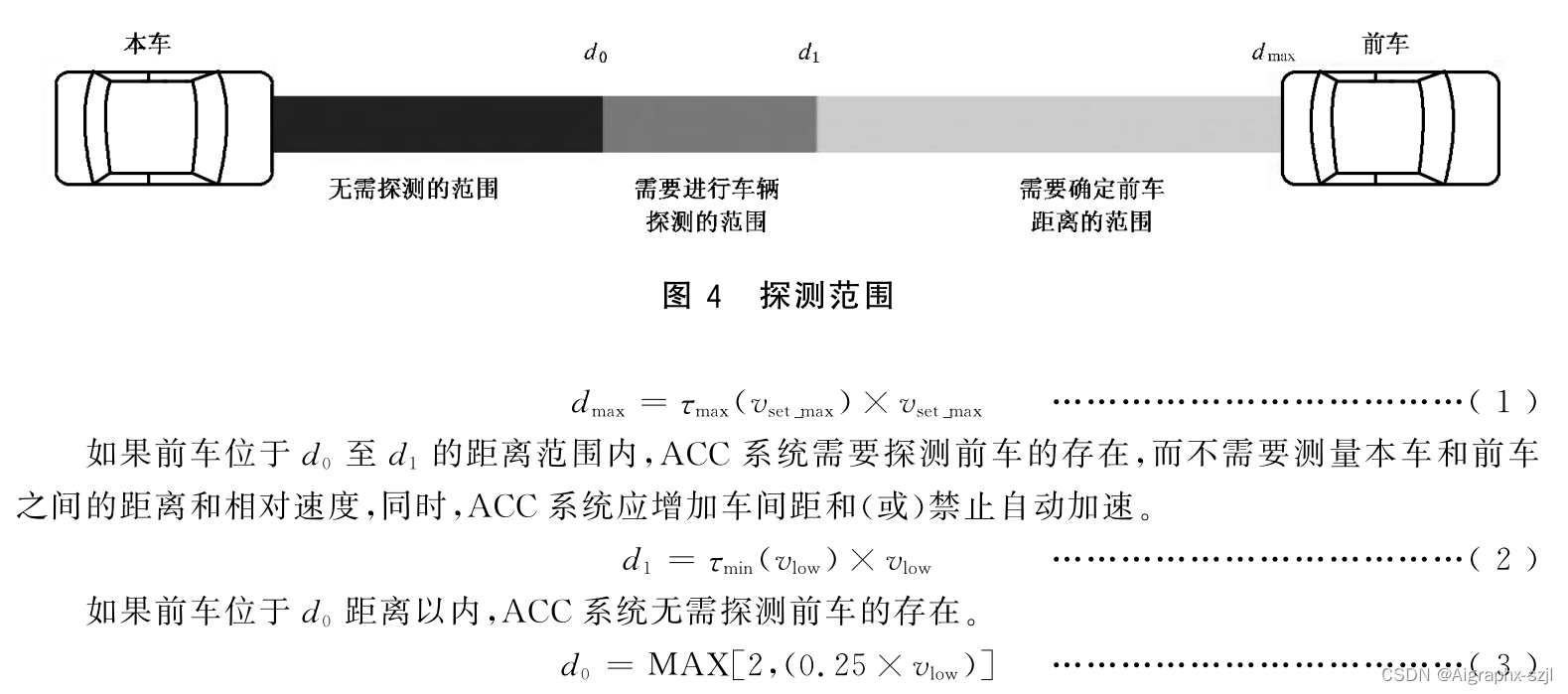
Figure 4 Zones of detection
If a forward vehicle is present within the distance range d1 to dmax, the ACC system shall measure the range between the forward and subject vehicles (see Figure 4). Within this range the forward vehicle shall be detected within a lateral area of at least the subject vehicle width.如果在距离d1至dmax范围内有前车存在,ACC系统应测量前车与被测车辆之间的范围。在此范围内,前车应在至少为被探测车辆宽度的横向区域内被检测到。
dmax = Tmax(vset_max)˟vset_max
If a forward vehicle is present within the distance range d0 to d1, the ACC system shall detect the presence of the vehicle but is not required to measure the range to the vehicle nor the relative speed between the forward and subject vehicles.如果前方车辆出现在距离d0到d1的范围内,ACC系统应检测到该车辆的存在,既不需要测量到该车辆的距离,也不需要测量前方车辆和目标车辆之间的相对速度。
d1 = 4m
If a forward vehicle is present at a distance less than d0, the ACC systetn is not required to detect the presence of the vehicle.如果前方车辆出现的距离小于d0,则不需要ACC系统来检测车辆的存在。
d0 = 2m
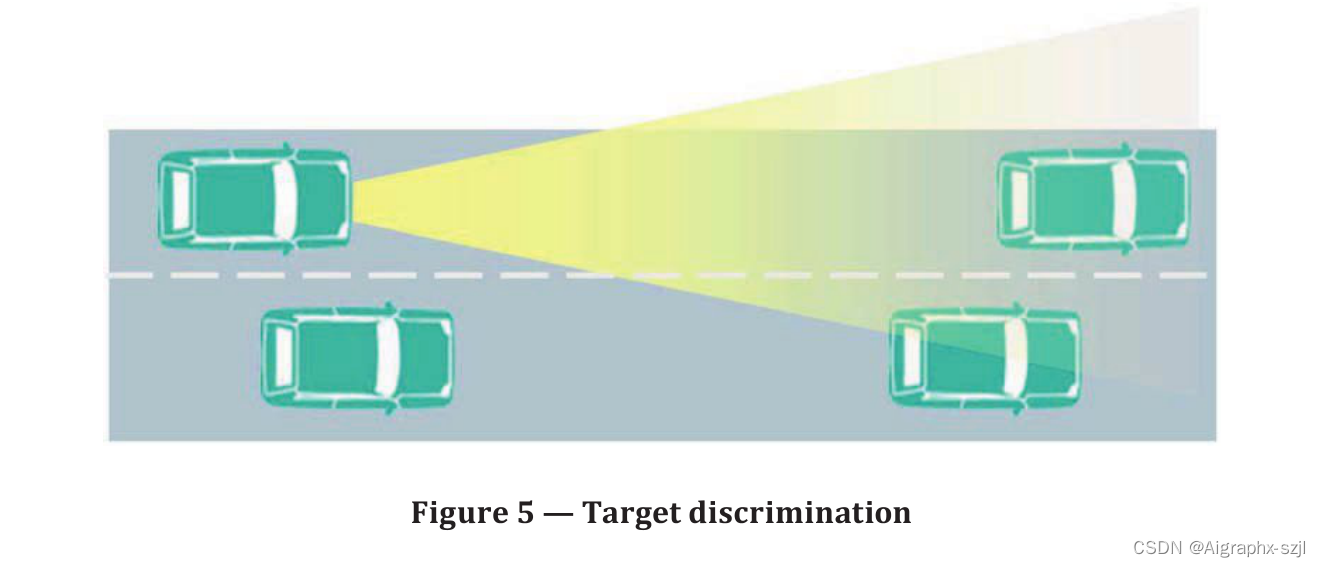
4.3.3.3 Target discrimination/目标识别能力
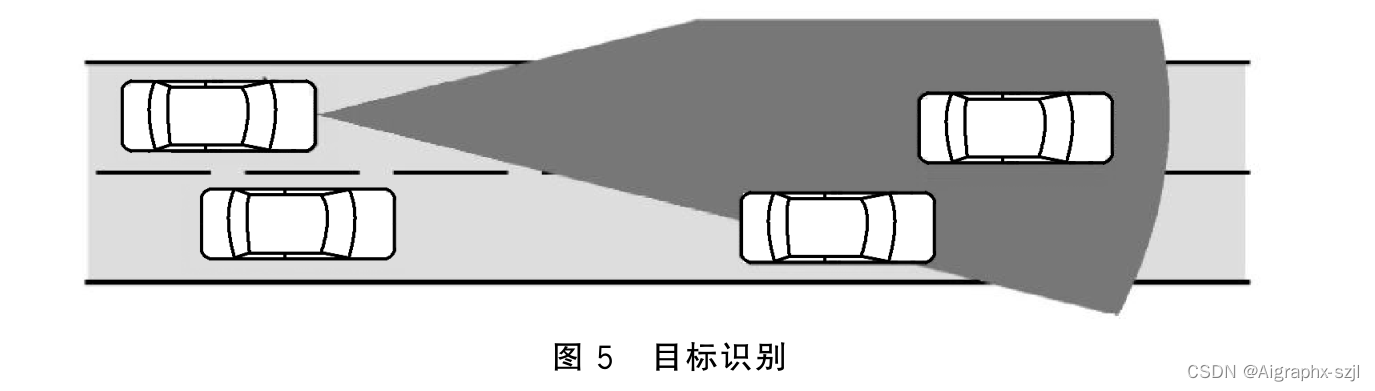
If there is more than one forward vehicle on straight roads and in steady-state curves, the forward vehicle (see Figure 5) in the subject vehicle's path shall be selected for ACC control in typical ACC situations as represented by the test scenario. See 7.5.如果在直线道路上和稳态弯道上有多辆前车,则在测试场景所代表的典型ACC情况下,应选择本车车辆路径上的前车进行ACC控制。
4.3.3.4 Curve capability/曲线能力
The ACC system shall enable a steady-state vehicle following with a time gap of Tmax( Vcircle) , on straight roads and curves with a radius down to Rmin = 500m. Therefore the system shall be capable of following a forward vehicle with the steady-state time gap Tmax( Vcircle), if the forward vehicle cruises on a constant curve radius Rmin with a constant speed Vcircle given by:ACC系统应使车辆能够以 Tmax (Vcircle) 的时间间隔在直线道路和半径小于 Rmin = 500m的弯道上稳态行驶。因此,如果前车在恒定的曲线半径Rmin上以恒定的速度Vcircle巡航,ACC系统应能以稳态跟车间距τmax( Vcircle)跟随前车,由以下公式给出:
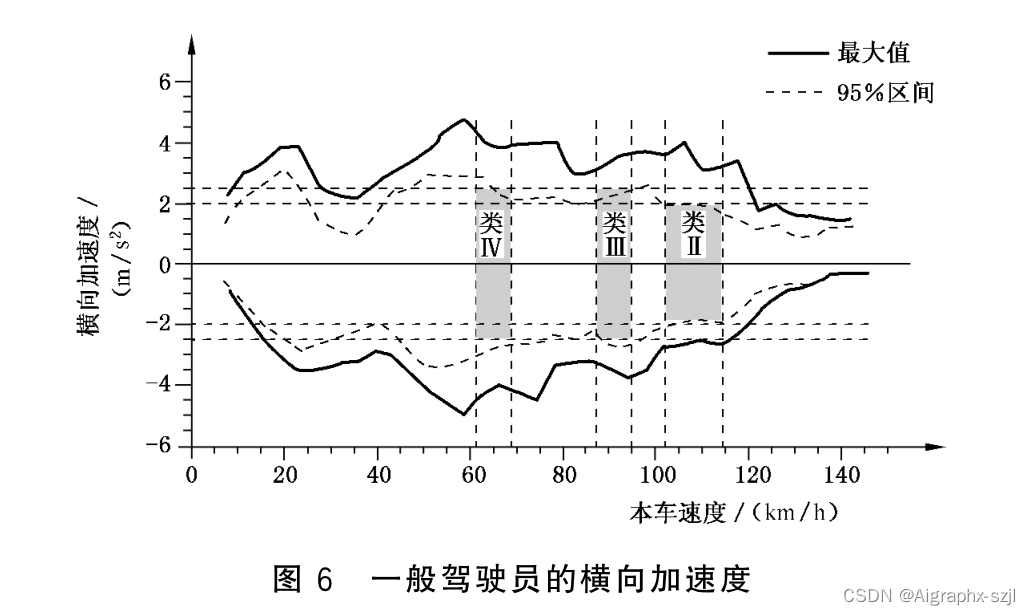
The value for alateral_curve is derived from average driver behaviour in curves (95 °/o drivers). See Figure 6 below.
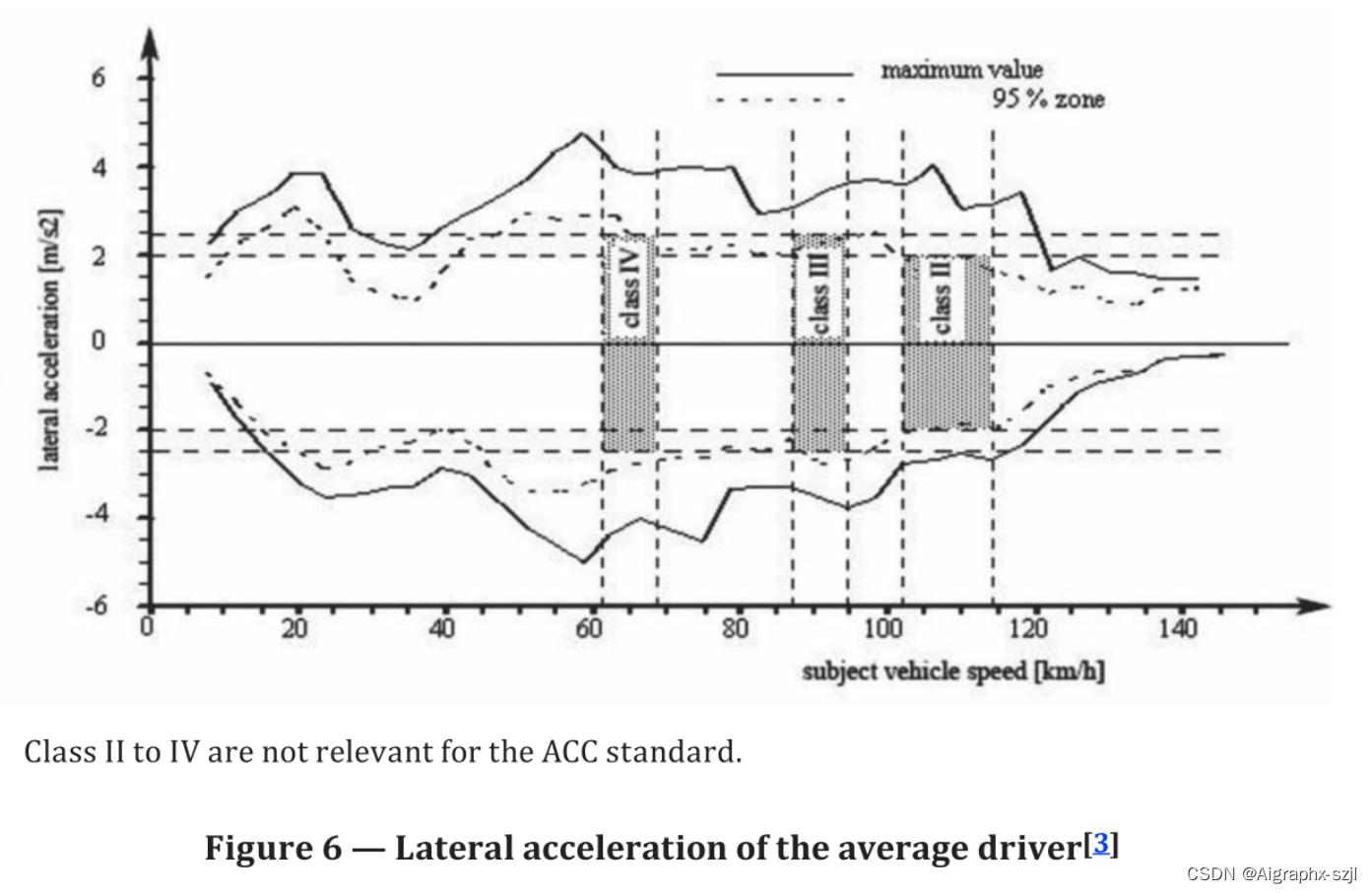
Thus the value to use is:
alateral,curve = 2.0 m/s^2
which leads to a steady-state speed for the curve driving of Vcircle = 114 km/h.alateral,curve = 2.0 m/s^2,从而得出曲线行驶的稳态速度为Vcircle=114 km/h。
4.3.4 Go" transition/转化条件
The transition from hold to following control or to speed control may be enabled through driver request or automa tically by the ACC function.从保持到跟随控制或速度控制的过渡可以通过驾驶员请求或由ACC功能自动启用。
4.4 GB/T 20608 基本性能
4.4.1 控制模式
控制模式(车间时距控制和车速控制)应自行转换。
4.4.2 车间时距
Tmin为可供选择的最小的稳态车间时距,可适用于各种车速V下的ACC控制。Tmin(v)应大于或等于1s,并且至少应提供一个在1.5s~2.2s区间内的车间时距T。
4.4.3 车速控制
ACC系统可以控制的本车行驶速度。
4.4.4 静止目标
对静止目标的响应不是ACC系统所应具备的功能。如果ACC系统不能对静止目标做出响应,则应在车辆的用户手册中予以声明。
4.4.5 追踪
4.4.5.1 概述
稳定状态下,ACC应该遵循2.2中规定的车间时距最小临界值。
过渡过程中的车间时距可能会暂时降至临界以下,在这种情况下,系统应该在一定内恢复到临界值以上。
ACC系统应具备图 4 详细说明的探测距离、目标识别能力及弯道适应能力。
4.4.5.2 直道的探测距离(类型 I,II,III,IV)
如果前车位于 d1至dmax的距离范围内,则 ACC 系统需要测量本车与前车之间的距离(见图 4)。
4.4.5.3 目标识别能力
如果在直道上前方存在多辆车,或者在弯道上并且本车的 ACC 系统属于型或型或V型,则与本车处于同一车道的前车(见图 5)将被选作 ACC 控制的目标车,检测方法见 6.4。
4.4.5.4 弯道适应能力(类型II,III,IV)
ACC系统能够使车辆在直道和弯道上以车间时距 Tmax(Vcircle)稳定跟随前车行驶。因此,如果前车沿半径为 Rmin的弯道Vcircle以恒速行驶,ACC 系统可使本车以稳定的车间时距 Tmax(Vcircle)跟随前车。不同类型的ACC系统对弯道半径的适应能力不同:ACC I型仅适应于直道(可认为半径为无穷大);ACC II型可适应的弯道最小半径为 Rmin=500m;ACC III型可适应的弯道最小半径为 Rm=250 m;ACC IV型可适应的弯道最小半径为 Rmin=125m。
4.5 ISO15622 Basic driver interface and intervention capabilities/基本的驾驶员交互与干预能力
4.5.1 Operation elements and system reactions/操作要素和系统反应
4.5.1.1 ACC systems shall provide a means for the driver to select a desired set speed Optionally, the driver could be provided with means to accept a set speed that is suggested by in-vehicle devices, e.g. a traffic sign recognition system.ACC系统应提供驾驶员选择所需设定速度的方式。可选地,可为驾驶员提供接受车载设备(如交通标志识别系统)建议的设定速度的手段。
4.5.1.2 In the "ACC following control" and the "ACC speed control" states, braking by the driver shall deactivate ACC function at least if the driver initiated brake force demand is higher than the ACC initiated brake force. For FSRA-type only: In the 'ACC Hold" state it is not mandatory that braking by the driver deactivates the ACC system (leading to ACC standby state; refer to Figure 3).在 "ACC跟随控制 "和 "ACC速度控制 "状态下,至少在驾驶员发起的制动力需求高于ACC发起的制动力时,驾驶员的制动应停用ACC功能。仅适用于FSRA型:在 "ACC保持 "状态下,驾驶员的制动不一定要退出ACC系统(导致ACC待机状态,参见图3,ACC系统与状态切换)。
4.5.1.3 The ACC-system shall not lead to a significant transient reduction of braking response to the driver's braking input (refer to ECE-R 13-H) even when the ACC-system has been braking automatically.即使在ACC系统自动制动的情况下,ACC系统也不应导致对驾驶员制动输入的制动响应的显著瞬时降低(参见ECE-R 13-H)。
4.5.1.4 The larger of the power demands from either the driver or the ACC system will be used to drive the engine power actuator (e.g. throttle actuator). This always gives the driver authority to override the ACC systetn engine power control.来自驾驶员或ACC系统的较大动力需求将用于驱动发动机动力致动器(例如节气门执行器)。这始终赋予驾驶员超越ACC系统引擎动力控制的权限。If the power demand of the driver is greater than that of the ACC system, automatic braking shall be disengaged with an immediate brake force release. A driver intervention on the accelerator pedal shall not lead to a significant delay of response to driver's input.如果驾驶员的动力需求大于ACC系统的动力需求,则应立即释放制动力,解除自动制动。驾驶员对加速踏板的干预不应导致对驾驶员输入的响应有明显延迟。
4.5.1.5 Automatic brake activation shall not lead to locked wheels for periods longer than anti-lock devices (ABS) would allow. This need not require an ABS system.自动制动的启动不得导致车轮锁定的时间超过防抱死装置(ABS)允许的时间。
4.5.1.6 Automatic power control by ACC shall not lead to excessive positive wheel slip for periods longer than traction control would allow. This need not require a traction control system.ACC的自动功率控制不应导致车轮过度滑动,且持续时间大于牵引力控制所允许的时间。
4.5.1.7 ACC systems may automatically adjust the time gap without action by the driver in order to respond to the driving environment (e.g. poor weather). However, the adjusted time gap shall not be less than the minimum titne gap selected by the driver. ACC系统可根据驾驶环境(如恶劣天气)自动调整跟车时距,而无需驾驶员采取行动。但调整后的跟车时距不得小于驾驶员选择的最小跟车时距。
4.5.1.8 If the system allows the driver to select a desired time gap, the selection method shall conform to either one of the following:如果系统允许驾驶员选择所需的跟车时距,其选择方法应符合以下任一条件:
1) if the system retains the last selected time gap after it is switched to ACC Off, as shown in Figure 2, the time gap shall be clearly presented to the driver at least upon system activation;如果系统在切换到ACC Off后保留了最后选择的跟车时距,如图2所示,则至少在系统启动时应将跟车时距清晰地呈现给驾驶员;
2) if the system does not retain the last selected time gap after it is switched to ACC Off, as shown in Figure 2, the time gap shall be set to a predefined default value equal of 1.5 s or greater.如果系统在切换到ACC Off后没有保留最后选择的跟车时距,则应将跟车时距设置为等于1.5s或更大的预定义默认值。
4.5.1.9 If there is a conventional cruise control function in addition to ACC there shall be no automatic switching between the ACC and conventional cruise control.如果除ACC外还有常规巡航控制功能,则ACC和常规巡航控制之间不得自动切换。
4.5.1.10 Optional: The system may be activated by the driver at standstill even when the driver is applying the brake pedal.可选:即使驾驶员踩下制动踏板,该系统也可在静止状态下由驾驶员启动。
4.5.1.11 For LSRA 1-type only: Type LSRA 1 systems shall either temporarily suspend operation but remain in the ACC active state or switch to ACC standby if the driver depresses the clutch pedal. The automatic brake manoeuvre can be continued during the use of the clutch pedal. After the system releases the brakes, the system may either resume ACC control or transition to ACC stand-by in response to the driver depressing the clutch pedal.仅适用于LSRA 1型:LSRA 1型系统应暂时中止运行,但仍处于ACC激活状态,或者在驾驶员踩下离合器踏板时切换到ACC待机状态。在使用离合器踏板期间,自动制动动作可以继续进行。在系统松开制动器后,系统可以恢复ACC控制,也可以在驾驶员踩下离合器踏板的情况下过渡到ACC待机状态。
4.5.2 Display elements/显示要素
A minimum feedback information for the driver contains activation state (whether the ACC system is active or not active) and the set speed This can be done by a combined output, e.g. displaying of set speed information only when ACC is active.驾驶员的最小反馈信息包含激活状态(ACC系统是否激活)和设定速度。
If the ACC system is not available due to a failure, the driver shall be informe If a symbol is used to notify the driver, a standard symbol shall be employe See ISO 2575.如果ACC系统因故障而无法使用,则应通知驾驶员。如果使用符号通知驾驶员,则应使用标准符号,参见ISO 2575。
If the ACC system deactivates auto matically, the driver shall be informe If a symbol is used to notify the driver, a standard symbol shall be employe.如果车辆同时配备了ACC和传统的巡航控制系统,则应让驾驶员知道是哪个系统在工作。
If the vehicle is equipped with both ACC and conventional cruise control systems, the driver should be made aware of which system is operating.车辆探测信号,意味着主动式ACC系统正在检测前方车辆,如果该前方车辆被用于适应控制,则需要激活该信号。
A "vehicle-detected"signal, with the meaning that the active ACC system is detecting a forward vehicle, is required to be active if this forward vehicle is used for adaptation of the control.车辆探测信号,意味着主动式ACC系统正在检测前方车辆,如果该前方车辆被用于适应控制,则需要激活该信号。
4.5.3 Symbols/符号
If symbols are used to identify ACC function or malfunction, standardized symbols in accordance with ISO 2575 shall be use.如果使用符号来识别ACC的功能或故障,应使用符合ISO 2575的标准符号。
4.6 GB/T 20608 基本的人机交互功能
4.7 ISO 15622 Operational limits/操作限制
To promote comfort, below 5m/s there shall not be a sudden brake force release due to a disappearing target vehicle or an automatic deactivation due to a system failure other than brake failures.为了提高舒适性,在5m/s以下,不得因目标车辆消失而突然释放制动力,也不得因制动故障以外的系统故障而自动失效。
For LSRA-type only: Automatic positive acceleration of ACC requires a vehicle speed vlow of at least 5m/s.仅适用于LSRA型:ACC的自动正向加速要求车速Vlow至少为5m/s。
The minimum set speed shall be vset_min >= 4,4 m/s.最小设定速度应为Vset_min>=4.4 m/s。
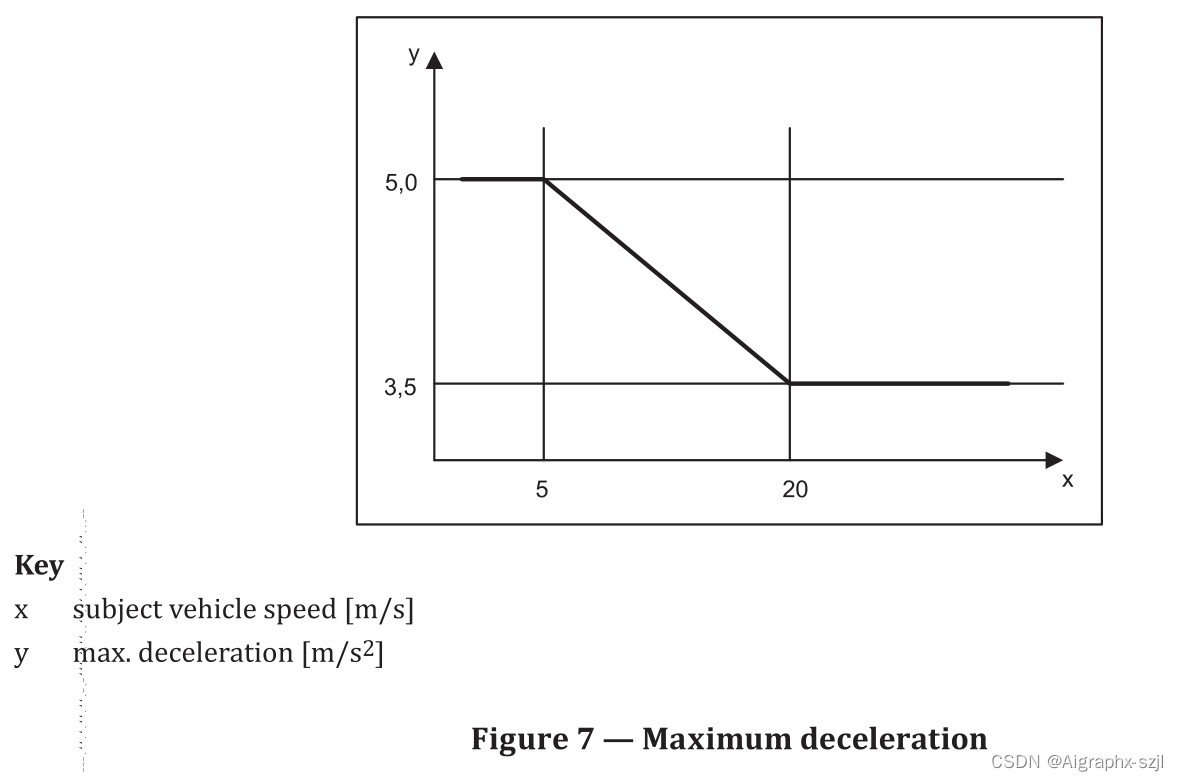
The average automatic deceleration of ACC systems shall not exceed 3,5 m/s^2 (average over 2s) when the vehicle is travelling above 20m/s and 5m/s^2 (average over 2s) when the vehicle is travelling below 5m/s as shown in Figure 7.当车辆行驶速度高于20m/s时,ACC系统的平均自动减速度不得超过3.5m/s^2 (平均2s以上) ,当车辆行驶速度低于5m/s时,自动减速度不得超过 5m/s^2 (平均2s以上),如图7所示。
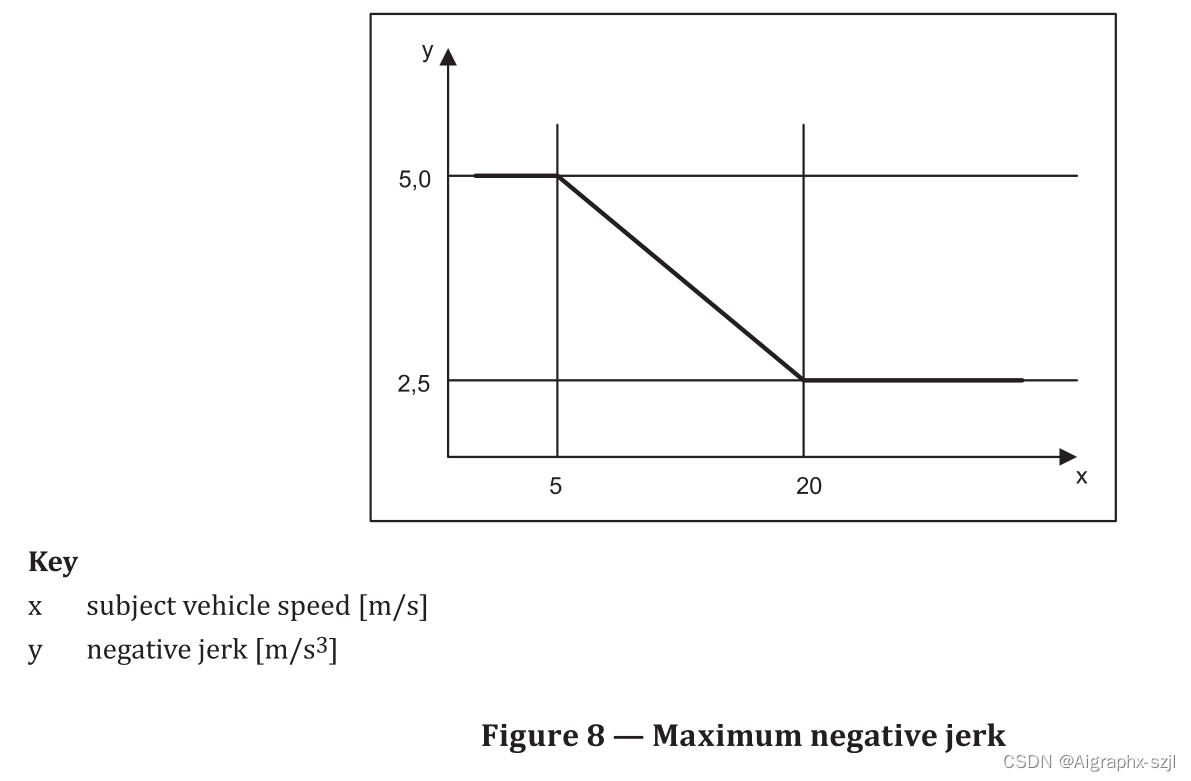
The average rate of change of automatic deceleration (negative jerk) shall not exceed 2.5 m/s^3 (average over 1 s) when the vehicle is t ravelling above 20m/s and 5 m/s^3 (average over 1 s) when the vehicle is travelling below 5 m/s as shown in the Figure 8.当车辆行驶速度高于20m/s时,自动减速的平均变化率(负抖动)不得超过2.5m/s^3(平均1s),当车辆行驶速度低于5m/s时,自动减速的平均变化率不得超过5m/s^3(平均1s),如图8所示。
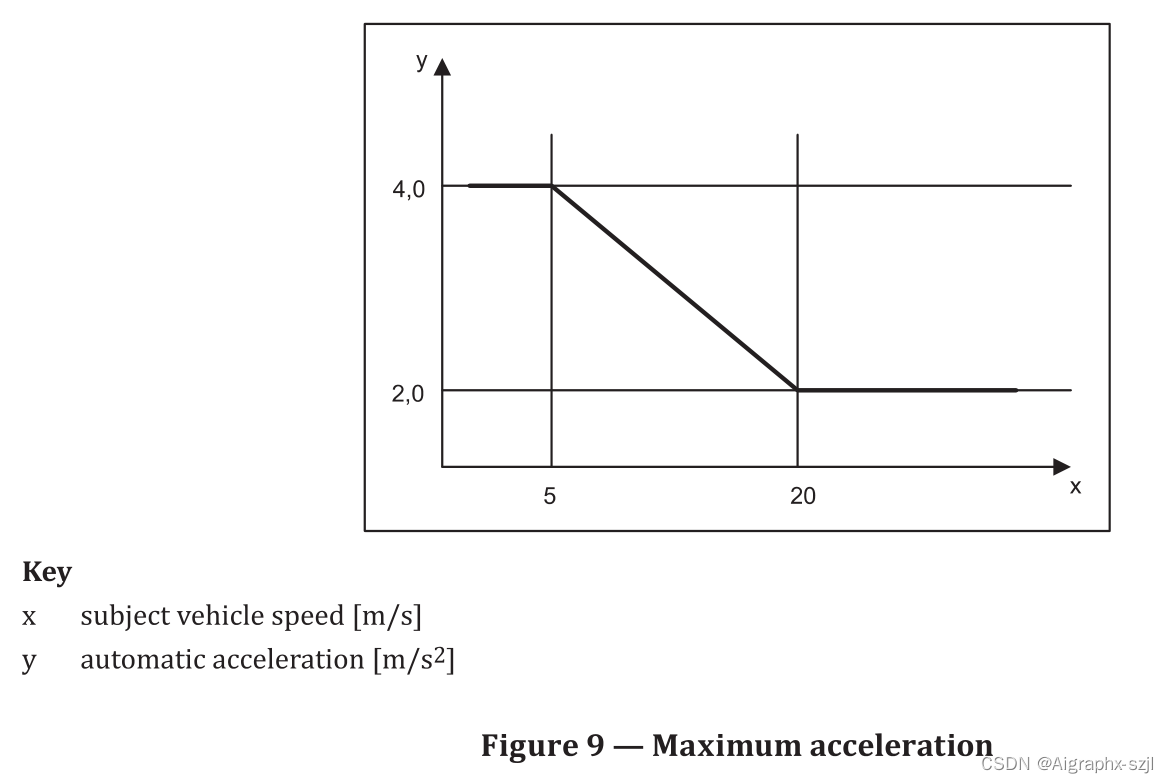
The average automatic acceleration of ACC systems shall not exceed 2 m/s^2 (average over 2s) when the vehicle is travelling above 20m/s and 4m/s^2 (average over 2 s) when the vehicle is travelling below 5 m/ s as shown in Figure 9.当车辆行驶速度超过20m/s时,ACC系统的平均自动加速度不应超过2m/s^2(平均超过2s),当车辆行驶速度低于5m/s时,自动加速度不应超过4m/s^2(平均超过2s),如图9所示。
If the target vehicle comes closer than d0 and is not detected anymore, the system should initiate a controller strategy starting with the last valid braking command, until the subject vehicle is stopped or the system detects a forward vehicle within d1 or the driver overrides the system via accelerator pedal. If a forward vehicle is detected within the distance range d0 to d1 and the distance cannot be determined, the system shall inhibit automatic acceleration.如果目标车辆靠近到d0以上,且检测不到目标车辆,系统应从最后一条有效制动指令开始启动控制器策略,直到目标车辆停止或系统检测到d1以内的前车或驾驶员通过加速踏板抑制系统。如果在d0~d1的距离范围内检测到前方车辆,且距离无法确定,系统应抑制自动加速。
4.8 ISO 15622 Activation of brake lights/制动灯的启动
If automatic service braking is applied, the brake light shall be illuminate When the ACC system applies other deceleration devices the system may illuminate the brake lights. The brake lights shall be illuminated within 350 ms of the ACC system initiating the service brake. To prevent irritating brake light flickering, the brake light may remain on for a reasonable time after the ACC initiated braking has ended.如果启用自动行车制动,则制动灯应点亮。当ACC系统应用其他减速装置时,系统可点亮制动灯。刹车灯应在ACC系统启动工况制动后350ms内点亮。为了防止刺激性的制动灯闪烁,在ACC启动制动后,制动灯可以保持合理的时间内亮起。
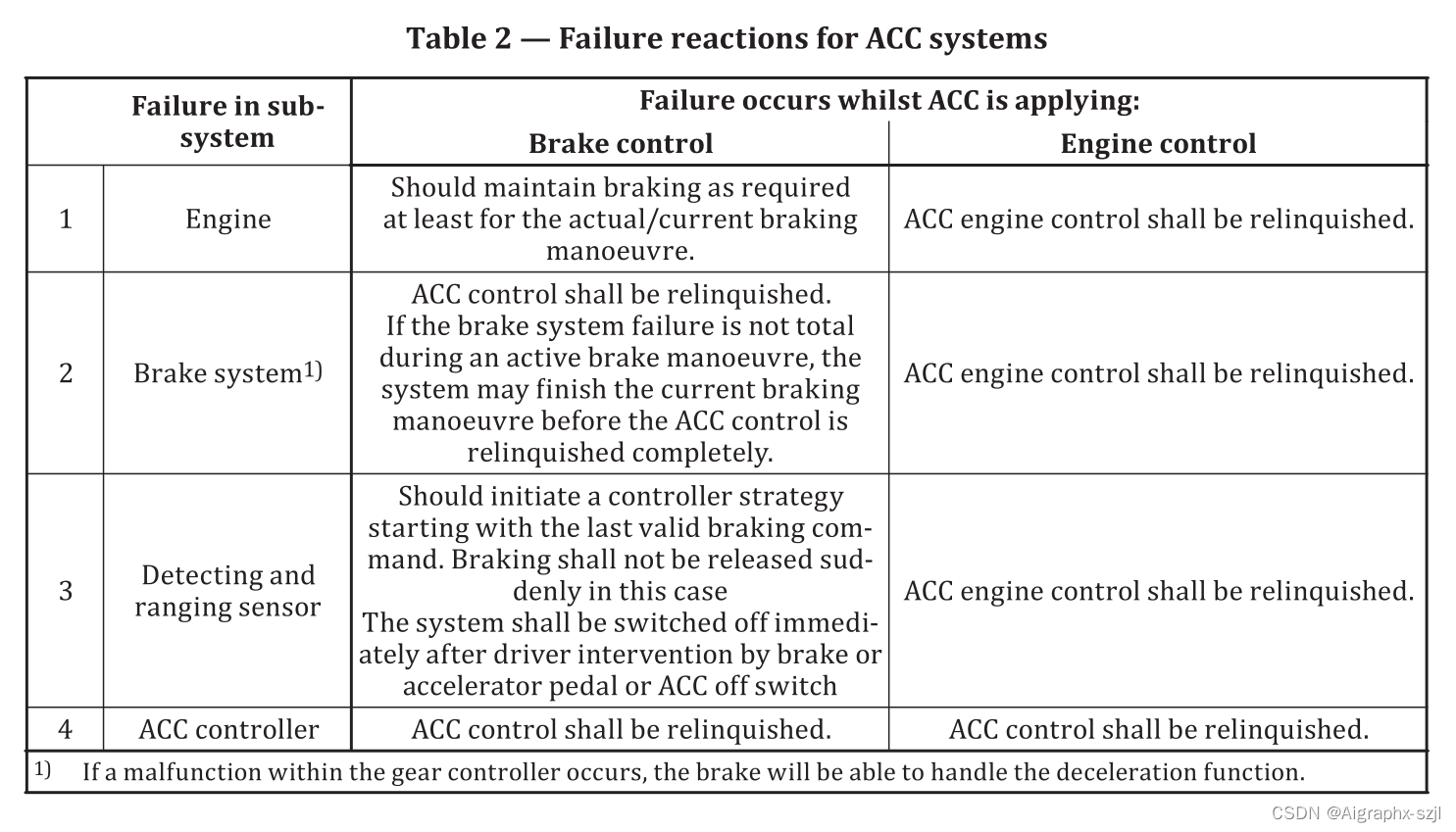
4.9 ISO 15622 Failure reactions/失效响应
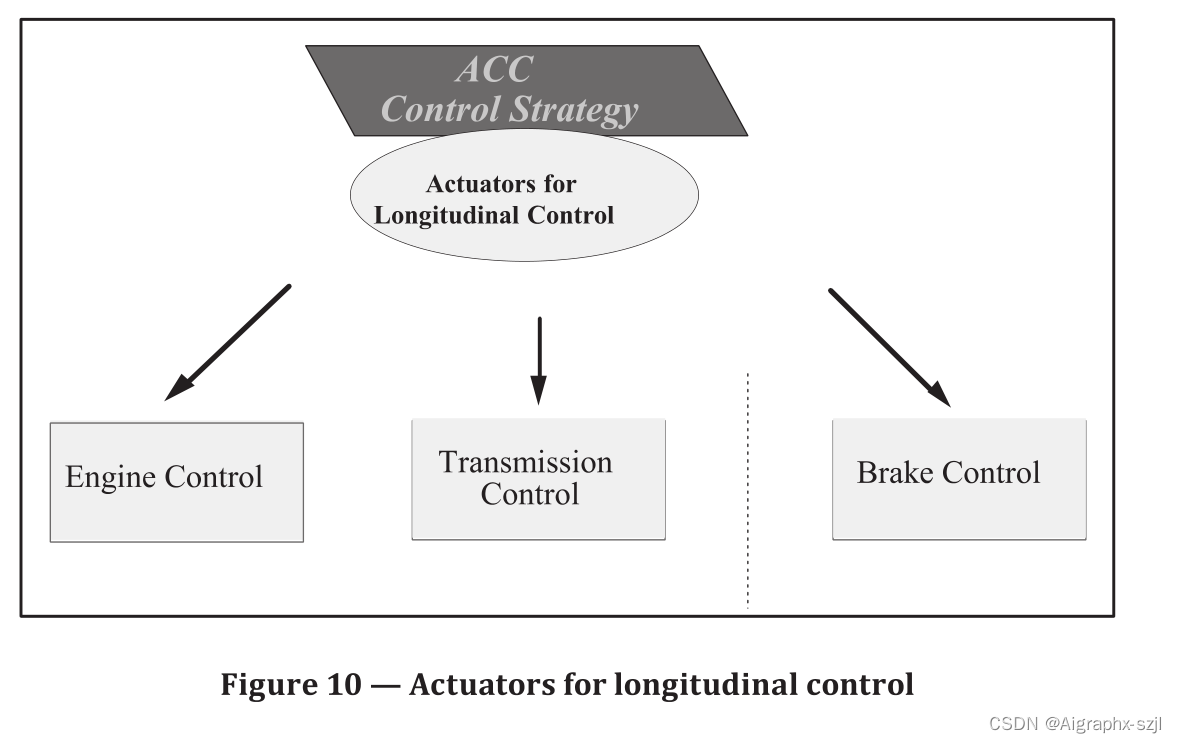
Table 2 shows the required reactions to failures depending on which subsystem fails. See Figure 10.表2显示了根据哪个子系统发生故障所需的反应。见图10。
The failures described in Table 2 shall result in immediate notification to the driver (except in the case of a gearbox failure with LSRA 1-type systems). The notification shall remain active until the system is switched off.下述的故障应立即通知驾驶员(LSRA 1型系统的变速箱故障除外),在系统关闭之前,该通知应保持有效。
The reactivation of the ACC system shall be prohibited until a successful self-test, initiated by either ignition off/on or ACC off/on, is accomplished.在点火关闭/开启或ACC关闭/开启的自检成功之前,应禁止重新启动ACC系统。
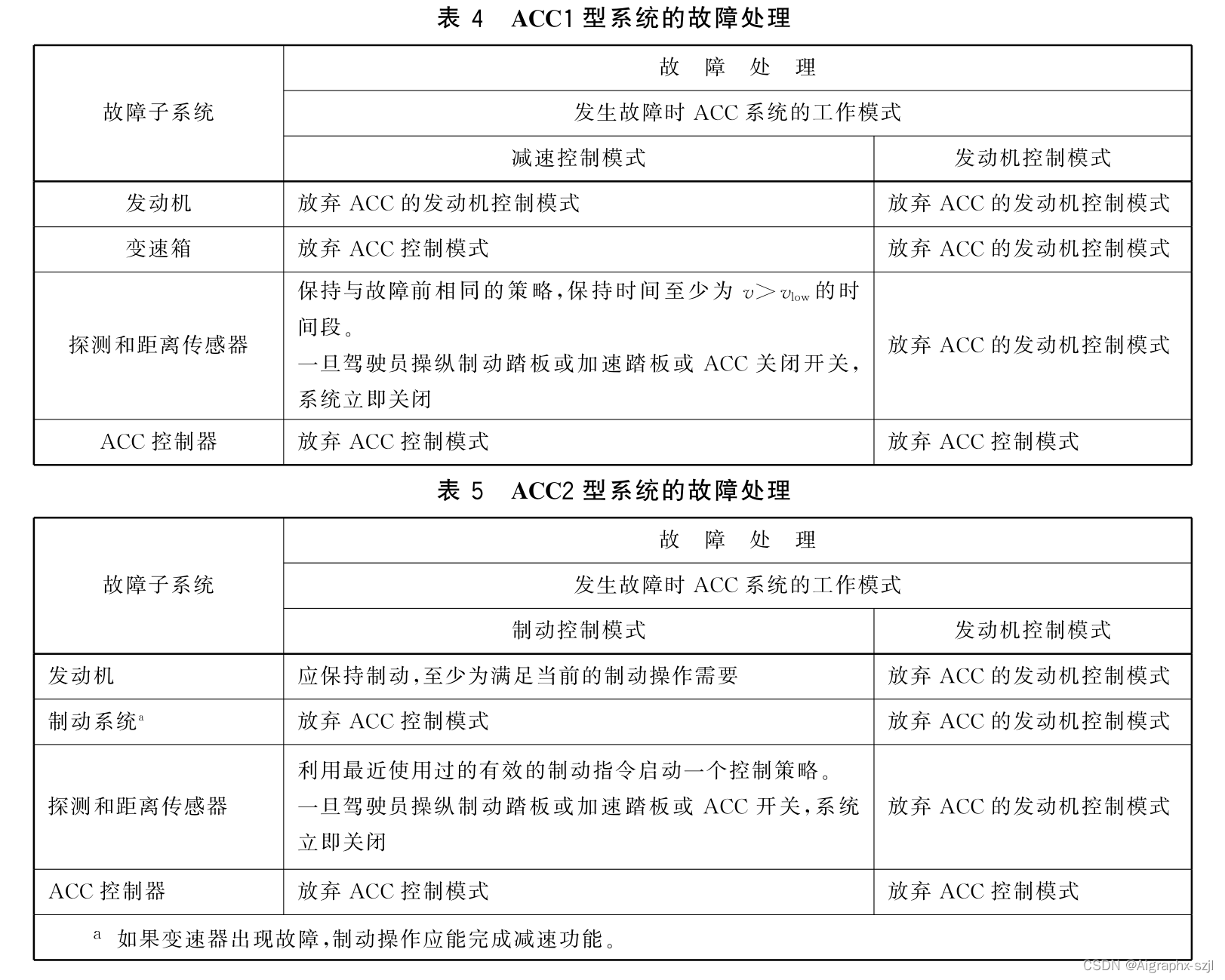
GB/T 20608 操作限制以及故障处理
4.10 ISO 15622 Performance evaluation test methods/性能评估测试方法
请参见本专题 19-1 相应章节。另外ACC测试用例及详细测试将另起一节专门介绍。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 1
1 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)