19-1.2 ACC 自适应巡航控制 GB/T 20608—2006 标准解读
ACC 自适应巡航控制国内标准详解
1. GB/T 20608—2006 标准解读
Intelligent transportation systems-Adaptive cruise control systems-Performance requirements and test procedures智能运输系统自适应巡航控制系统性能要求与检测方法
本标准对应于ISO15622:2002(E《交通信息与控制系统自适应巡航控制系统性能要求与检测规程》(英文版),与 ISO 15622:2002一致性程度为非等效。
本标准由中华人民共和国交通部提出。
1.1 引言
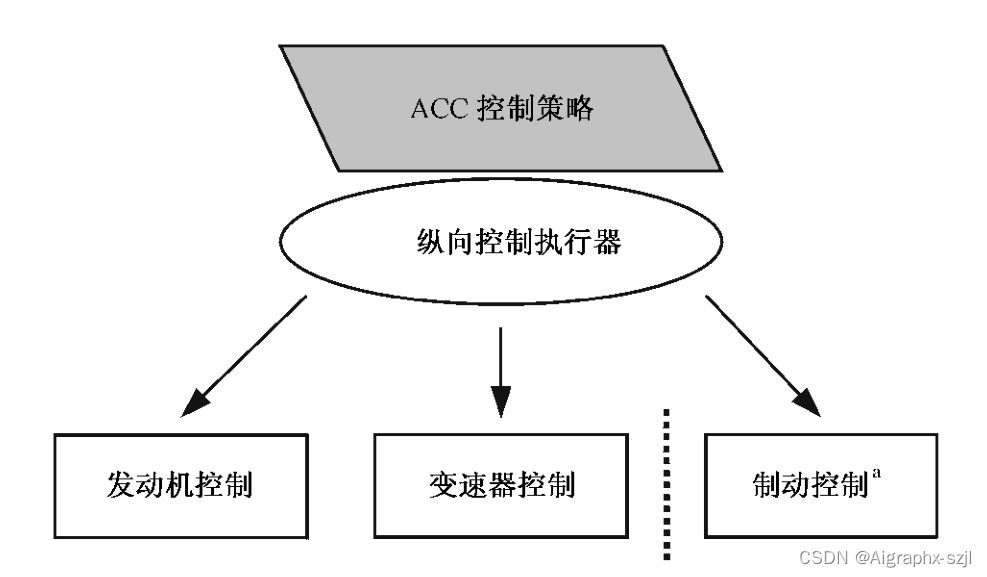
自适应巡航控制(ACC)系统的主要功能是基于特定的信息控制车速与前方车辆运动状态相适应,这些信息包括:(1)与前车间的距离;(2)本车的运动状态;(3)驾驶员的操作指令,如下图。基于上述信息,控制器(下图中称为的“ACC控制策略”)发送控制指令给执行器纵向控制,同时将状态信息提供给驾驶员。
PS:特定信息:前车车辆状态信息和本车车辆状态信息,道路信息。
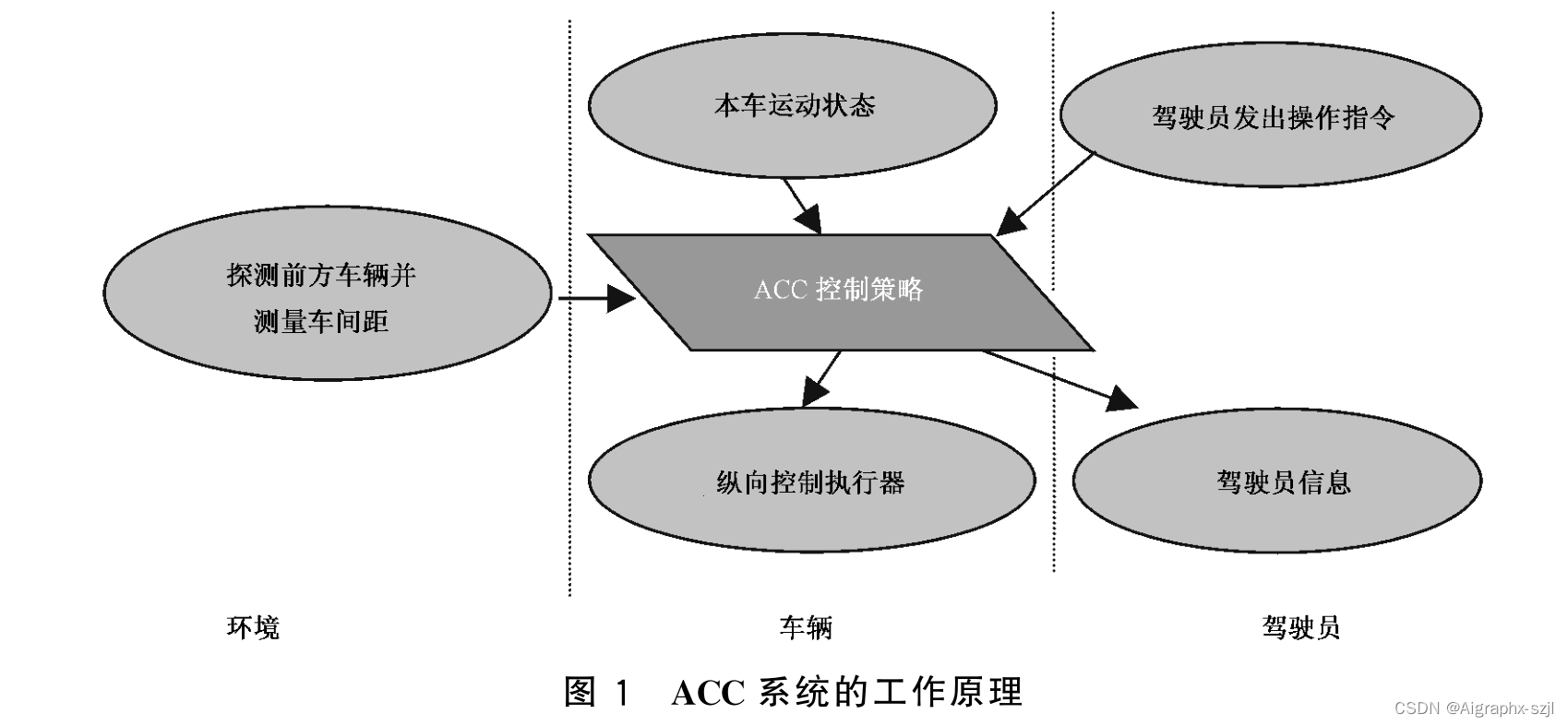
ACC的目的是通过对车辆纵向运动进行自动控制,以减轻驾驶员的疲劳强度,保证行车安全,并通过方便的方式为驾驶员提供辅助支持。
本标准可被其它标准作为基本标准采用,例如,有关探测传感器及其扩展功能等,这将有助于使ACC相关标准更加详尽。因此,用于协调合作解决方案的探测传感器功能、性能及通讯方面的特殊要求将不在本标准的讨论之列。
1.2 范围
本标准规定了自适应巡航控制(ACC)系统的基本控制策略、最低的功能要求、基本的人机交互界面、故障诊断及处理的最低要求及其性能测试规程。
1.3 规范性引用文件
下列文件中的条款通过本标准的引用而称为本标准的条款。凡是注日期的引用文件,其随后所有的修改单或修订均不适用于本标准,然而鼓励根据本标准达成协议的各方研究是否可使用这些文件的最新版本。凡是不注日期的引用文件,其最新版本适用于本标准。
GB/T 4782 道路车辆 操作件、指示器及其信号装置 词汇。
UN ECE R13-H 关于乘用车制动性能的统一规定。
1.3.1 术语和定义
1.3.1.1 主动制动控制 active brake control
由ACC系统而不是驾驶员施加的制动控制动作
1.3.1.2 自适应巡航控制 adaptive crusie control(ACC)
常规巡航控制系统的提升和扩展,它可以通过控制本车发动机、传动系统或者制动器实现与前车保持适当的距离的目的。
1.3.1.3 制动 brake
产生阻碍车辆运动或运动趋势的力(制动力)的过程,分为以下种类:
摩擦制动:由车辆上相对运动的两个部分产生的摩檫力。
电磁制动:由于车辆上相对运动但不接触的两个部分基于电磁作用产生的电磁力。
液力制动:由于车辆上相对运动的两个部分的液体运动产生的阻尼力。
发动机制动:由发动机的制动作用产生的传递到车轮的制动力。
1.3.1.4 车间距 clearance,c
前车尾部与本车头部之间的距离。
1.3.1.5 常规巡航控制 conventional cruise control
按照驾驶员设定控制车辆行驶速度的系统。
1.3.1.6 前车 forward vehicle
与本车同向、同路,并在本车前方行驶的车辆。
1.3.1.7 自由流交通 free-flowing traffic
车流量大但比较流通的交通,不包括频繁起步停车和紧急制动的情况。
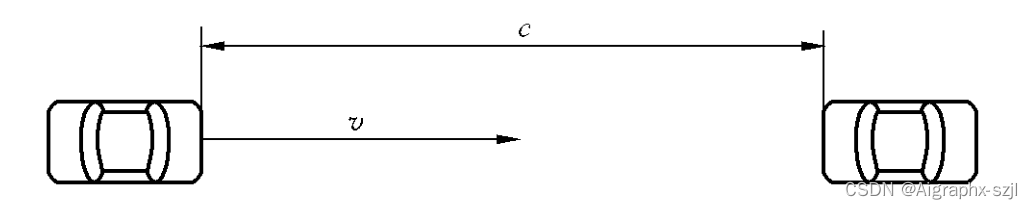
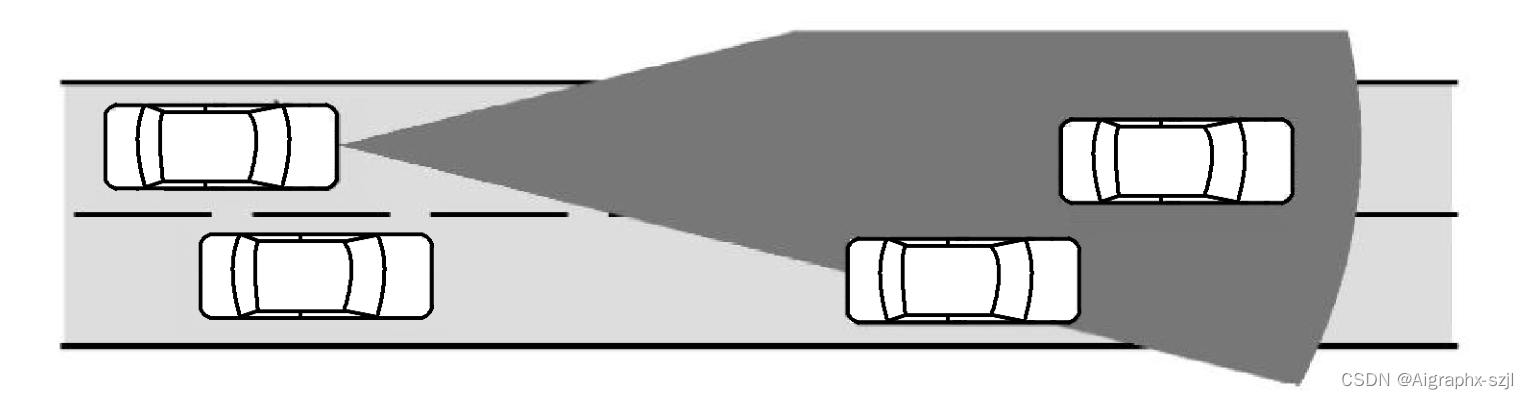
1.3.1.8 车间时距 time gap,t
本车驶过连续车辆的车间距所需的时间间隔。
车间时距t与车速v和车间距c相关,计算公式为t=c/v,如图所示:
1.3.1.9 设定速度 set speed
由驾驶员或由ACC系统以外的其它控制系统设定的期望行驶速度,亦即车辆在ACC系统控制下的最高期望速度。
1.3.1.10 稳定状态 steady state
相关参数不随时间、距离变化的车辆状态。
1.3.1.11 本车 subject vehicle
配备ACC系统的车辆。
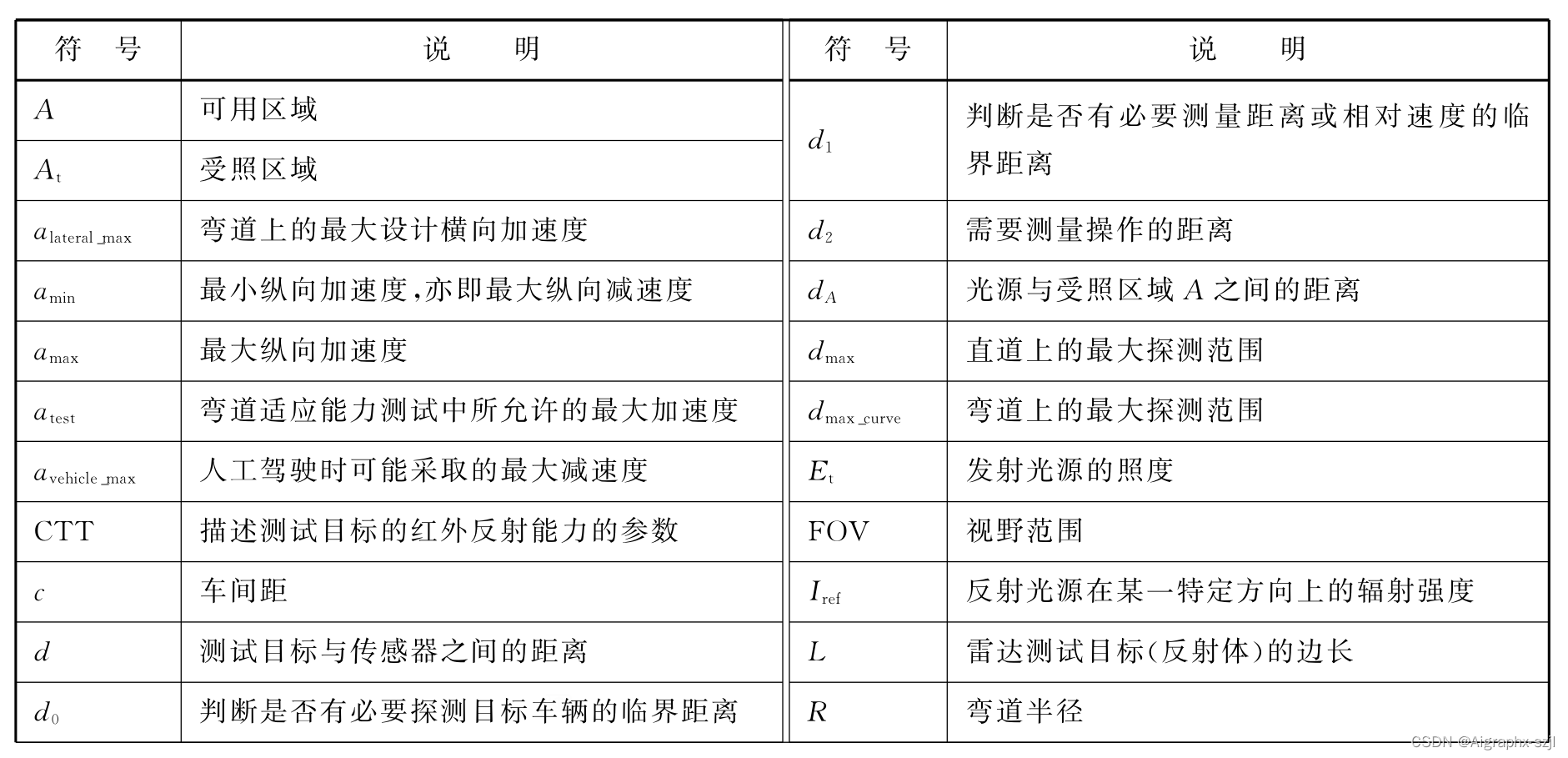
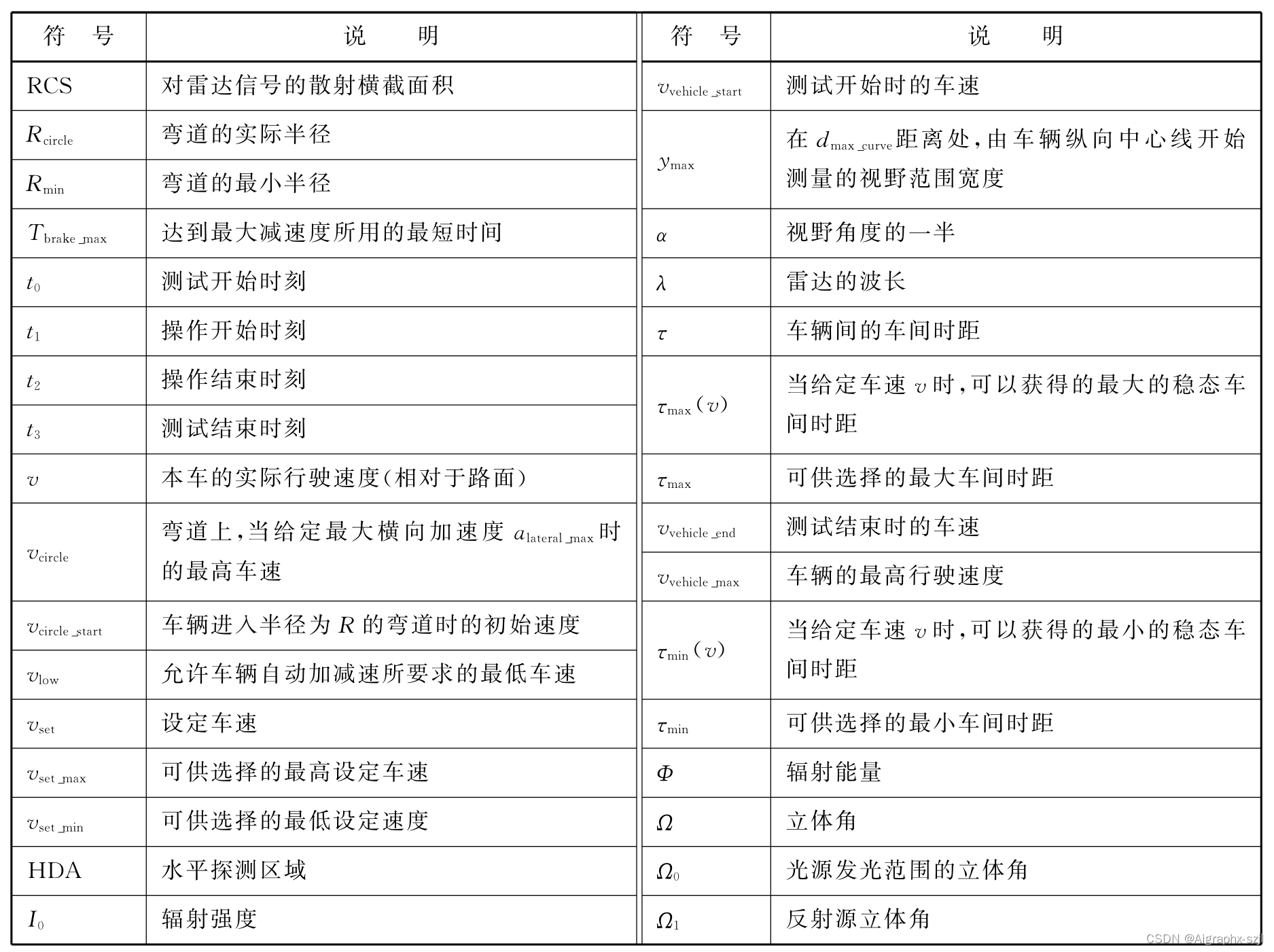
1.3.2 符号
下表所有符号适合本标准。
续表:
1.4 ACC系统类型及状态
1.4.1 ACC系统类型
1.4.1.1 根据纵向控制执行器结构分类
ACC 系统根据纵向控制执行器结构的不同分为 4 种类型:
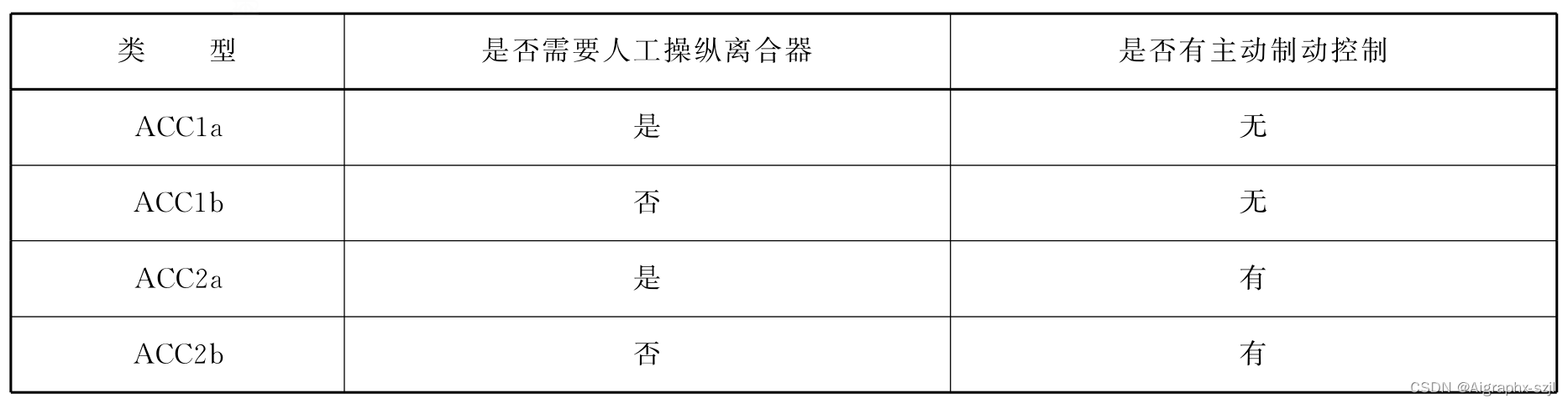
当配备离合器的车辆进行主动制动控制时,如果离合器无法自动分离,应将制动和发动机怠速控制间的潜在冲突及早提示给驾驶员,并为驾驶员提供一种明确且可实行的切换方案。
1.4.1.2 根据弯道行驶适应能力分类
ACC 系统根据对弯道行驶的适应能力分为 4 种类型:

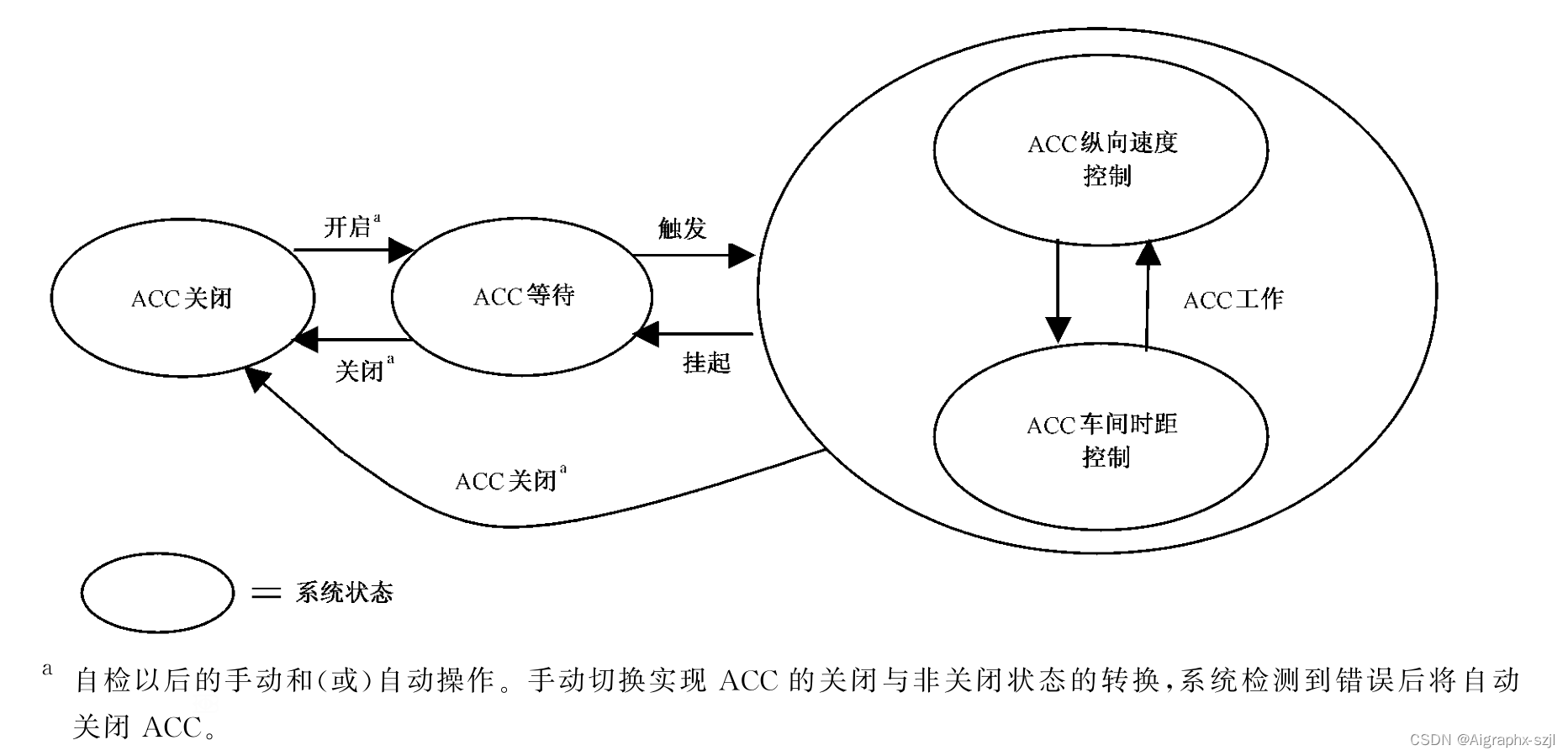
1.4.2 ACC系统状态
ACC系统的状态可分为3种:ACC关闭状态、ACC等待状态和ACC工作状态。
1.4.2.1 ACC关闭状态
直接的操作动作均不能触发ACC系统
1.4.2.2 ACC等待状态
ACC系统没有参与车辆的纵向控制,但可随时被驾驶员触发而进入工作状态
1.4.2.3 ACC工作状态
ACC系统控制本车的速度和(或)车间时距。

1.5 ACC性能要求
| 1 基本控制策略 |
| 以下控制功能及状态切换功能是对ACC系统的最低要求,并构成其基本的系统行为: |
| —当ACC处于工作状态时,本车通过对速度的自动控制来与前车保持一定的车间时距或预先的设定速度(以二者中速度低者为准)。这两种控制模式之间的转换可由ACC系统自动完成。 |
| —稳定状态的车间时距可由系统自动调节或由驾驶员调节。 |
| —当本车的速度低于最低工作速度Vlow时,应禁止由“ACC等待状态”向“ACC工作状态”的转换。此外,如果系统处于“ACC工作状态”,并且速度低于Vlow时,自动加速功能应被禁止,此时ACC系统可由“ACC工作状态”自动转换为“ACC等待状态”。 |
| —如果前方存在多车辆,则ACC系统应该自动选择跟随本车车道内最接近的前车。 |
| 2 基本性能 |
| 2.1 控制模式 |
| 控制模式(车间时距控制和车速控制)应自行转换。 |
| 2.2 车间时距 |
| Tmin为可供选择的最小的稳态车间时距,可适用于各种车速V下的ACC控制。Tmin(v)应大于或等于1s,并且至少应提供一个在1.5s~2.2s区间内的车间时距T。 |
| 2.3 车速控制 |
| ACC系统可以控制的本车行驶速度。 |
| 2.4 静止目标 |
| 对静止目标的响应不是ACC系统所应具备的功能。如果ACC系统不能对静止目标做出响应,则应在车辆的用户手册中予以声明。 |
| 2.5 追踪 |
| 2.5.1 概述 |
| 稳定状态下,ACC应该遵循2.2中规定的车间时距最小临界值。 |
| 过渡过程中的车间时距可能会暂时降至临界以下,在这种情况下,系统应该在一定内恢复到临界值以上。 |
| ACC系统应具备2.5.2-2.5.4中详细说明的探测距离、目标识别能力及弯道适应能力。 |
| 2.5.2 直道的探测距离(类型I,II,III,IV) |
|
如果前车位于 d1至 dmax的距离范围内,则 ACC 系统需要测量本车与前车之间的距离。 |
 |
|
|
|
如果前车位于d0至d1的距离范围内,ACC系统需要探测前车的存在,而不需要测量本车和前车之间的距离和相对速度,同时,ACC系统应能增加车间矩和(或)禁止自动加速。 |
|
|
| 如果前车位于d0距离范围内,ACC系统不需要探测前车的存在。 |
| 2.5.3 目标识别能力 |
|
如果在车道上前方存在多车辆,或者在弯道上并且本车的ACC系统属于II型,III型或IV型,则于本车处于同一车道的前车将被选作ACC控制的目标车。
|
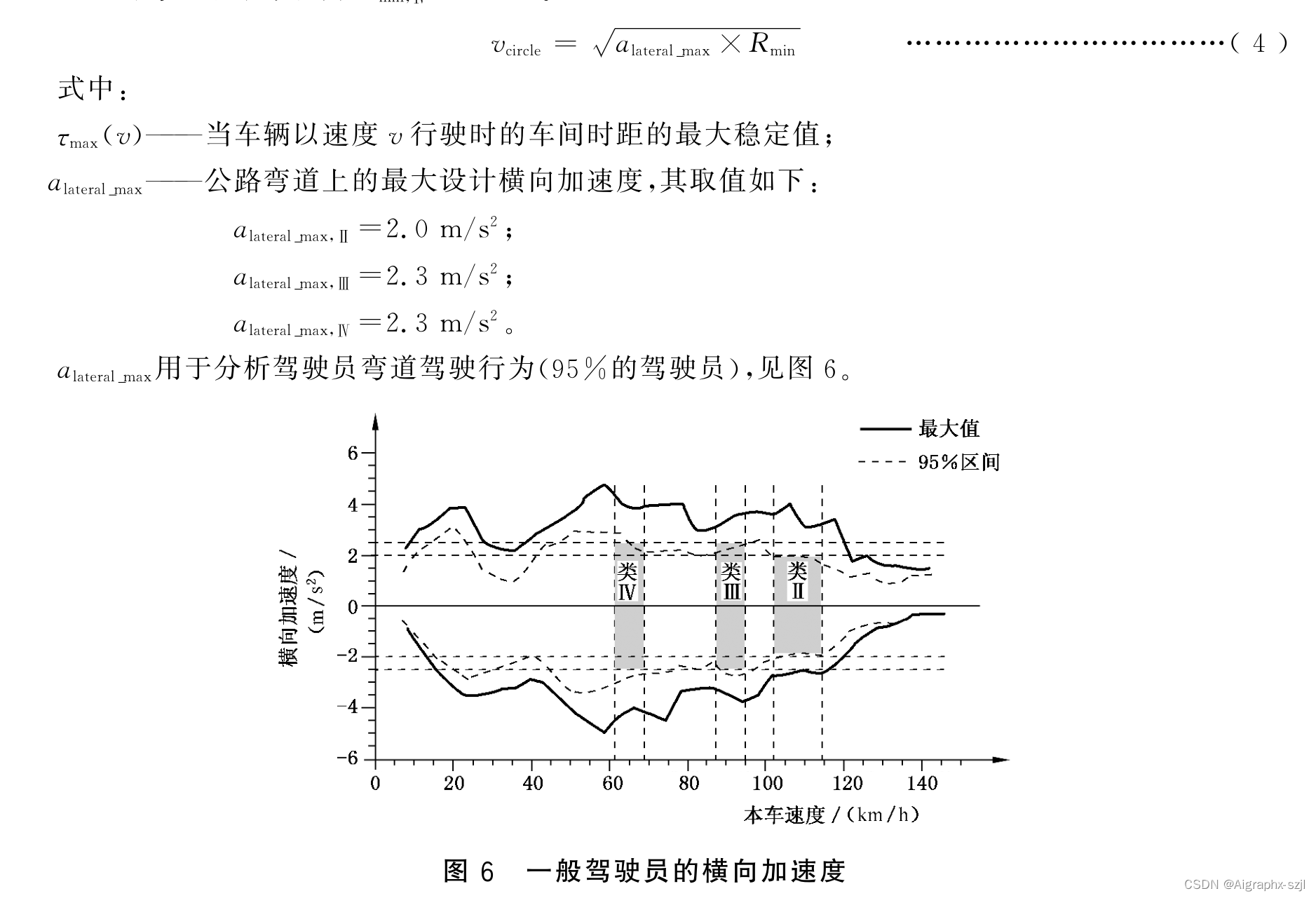
| 2.5.4 弯道适应能力(类型II,III,IV) |
|
ACC系统能够使车辆在直道和弯道上以车间时距Tmax(Vcircle) 稳定跟随前车行驶。因此,如果前车沿着半径为Rmin的弯道以恒定速度行驶,ACC系统可使本车以稳定的车间时距跟随前车。不同类型的ACC系统对弯道半径的试应能力不同:ACC I型只适应于直道,ACC II型可适应弯道最最小半径Rmin =500m,ACC III型可适应弯道最最小半径Rmin =250m,ACC IV型可适应弯道最最小半径Rmin =125m。
|
| 3 基本的人机交互功能 |
| ACC系统应具备下列控制和干预能力。 |
| 3.1 操作与系统反应 |
| 3.1.1 ACC系统应为驾驶员提供一种用来选择并设定期望速度的方法。 |
| 3.1.2 当驾驶员施加的制动力大于ACC系统的制动力时,驾驶员的制动行为将使ACC系统失效(切换到ACC等待状态,见状态图)。ACC系统不应明显地消弱车辆对驾驶员制动输入的瞬时响应能力。即使ACC系统处于自动制动的情况下,也不应明显消弱车辆对驾驶员踏板制动的动态响应能力。 |
| 3.1.3 驾驶员踩下离合器踏板时,ACC1a和ACC2a型系统应暂时休眠但保持工作状态或是切换到等待状态。在踩下离合器踏板的过程中,ACC2a型系统的自动制动操作能依然有效。当释放制动踏板后,ACC系统可恢复到工作状态或切换到等待状态以便对驾驶员的离合器踏板输入做出响应。 |
| 3.1.4 当驾驶员与ACC系统均由发动机动力控制(节气门输入)请求时,以二者中大者为准,这将使驾驶员对发动机动力控制的优先级始终高于ACC系统。 如果驾驶员的制动需求高于ACC系统时,ACC系统的自动制动力应立即释放。对驾驶员控制加速踏板不应有明显的响应延迟。 |
| 3.1.5 自动制动状态(仅适用于ACC2型系统)对车轮的抱死时间不应超过ABS的允许值。ACC系统不干涉ABS。 |
| 3.1.6 ACC系统的发动机制动力控制作用引起的车轮打滑时间不应超过牵引力控制系统的允许值。ACC系统不干涉牵引力控制系统。 |
| 3.1.7 系统可适当调整车间时距以适应驾驶环境的变化(如恶劣天气),但被调整后的车间时距不应低于驾驶员的设定值。 |
| 3.1.8 如果ACC系统允许驾驶员选择期望的车间时距,应采取以下几种方法之一: |
| a) 如果ACC系统关闭后仍存储着最后一次选定的车间时距值,则系统被再次激活后,应将该车间时距值显示给驾驶员。 |
| b) 如果ACC系统关闭后不存储最近选定过的车间时距值,则车间时距应被设定为默认值。 |
| 3.1.9 如果车辆同时配备有ACC系统和常规巡航系统,则二则之间不应自动切换。 |
| 3.2 显示 |
| 3.2.1 为驾驶员提供最基本的反馈信息,包括ACC系统状态以及设定速度等,并且他们可以组合在一起显示输出,例如仅在ACC系统处于工作状态时才能显示设定速度信息,且应使显示不影响驾驶员行为。 |
| 3.2.2 如果ACC系统关闭或者出现故障,应即使提示驾驶员,提示符号应符合GB/T 4782。 |
| 3.2.3 如果车辆同时配备有ACC系统和定速巡航系统,则应向驾驶员提示当前处于工作状态的系统。 |
| 3.2.4 推荐采用信息“探测到车辆”来表示ACC系统已探测到前方有一车辆,可作为控制的参考目标。 |
| 3.3 符号 |
| 如果采用符号来标识ACC系统的功能和故障状态,应符合GB/T 4782。 |
| 3.4 操作限制 |
| ACC系统进行正向加速操作的前提是车速在最低巡航速度Vlow以上,>= 5m/s。 |
| 当ACC系统正处于自动关闭过程中,并且车辆速度低于Vlow,不允许突然撤销制动力。 |
| 最低的设定车速(Vset_min)应为:Vset_min>=7m/s且Vset_min>Vlow。 |
| ACC系统的平均减速度不应大于3.0m/s^2 (以2s的长度按采样求平均)。 |
| ACC系统的减速度的平均变化率不应大于2.5m/s^3(以1s的长度按采样求平均)。 |
| ACC系统的自动加速度(amax)不大于2.0m/s^2。 |
| 3.5 制动灯控制(仅适用于ACC2型系统) |
| 如果ACC系统工作过程中进行自动制动操作,则应点亮制动灯,当ACC系统执行了其它减速度操作时制动灯也可被点亮。制动灯点亮动作应在ACC系统开始制动操作后的100ms以内完成。以防止制动灯忽亮忽暗,在ACC结束制动之后可维持制动灯亮一个合理的时间。 |
 |
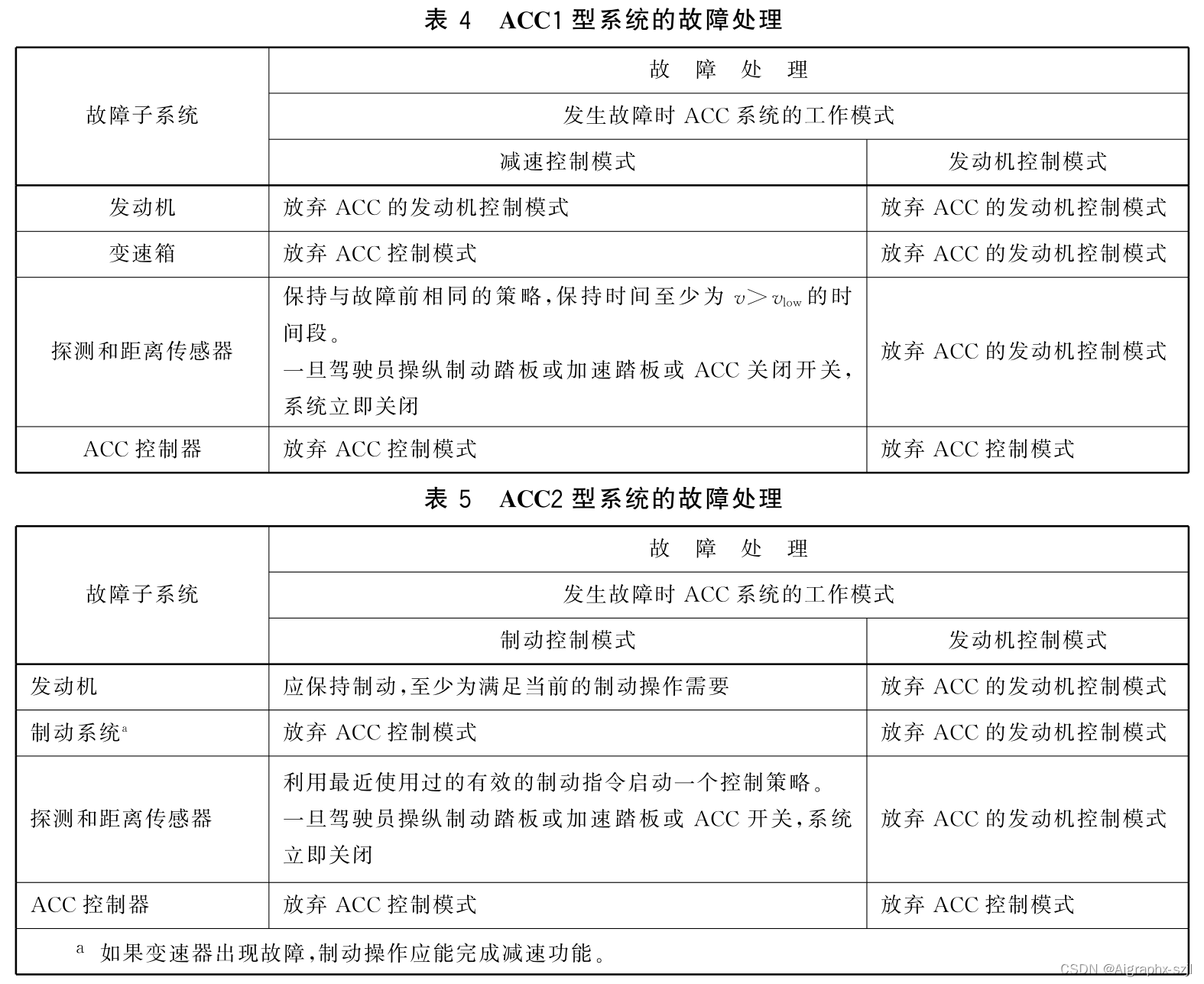
| 3.6 故障处理 |
| ACC故障时,提示信息如下表: |
| 出现故障时,应立即提示驾驶员,提示信息应保持至系统关闭。 |
|
ACC系统重新启动之前应完成系统自检,自检过程可由点火开关或ACC系统开关触发。
|

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐

 13
13 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)