【ROS问题】joint_state_publisher和robot_state_publisher的区别和联系
·
问题描述
在使用moveit!对机械臂进行运动规划时,joint_state_publisher和robot_state_publisher各有什么作用,它们之间又有什么联系?
解决方案
运行一个moveit!package,在命令行输入rqt_graph,输出计算图如下:
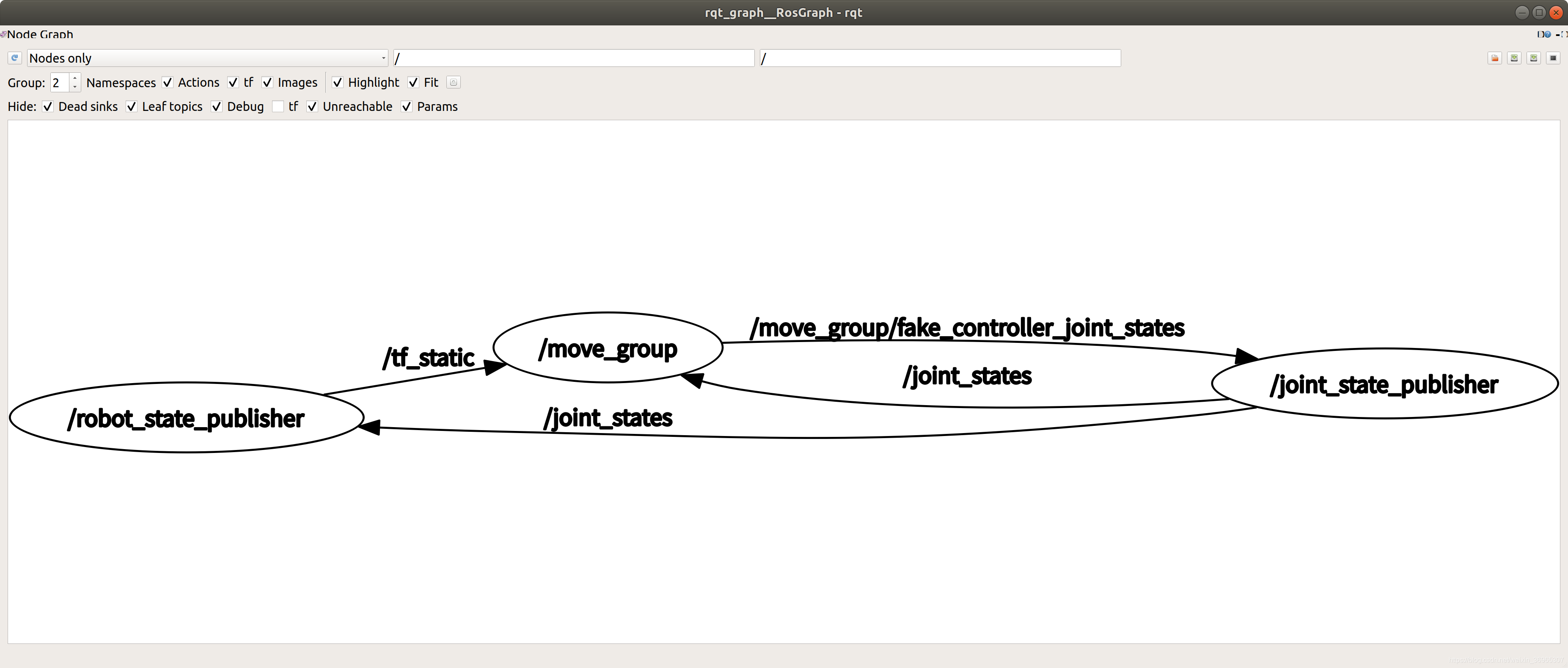
- joint_state_publisher:该节点通过读取参数服务器上的/robot_description来获得机器人的所有非固定关节,并从/move_group/fake_controller_joint_states主题来获取关节状态。主要功能是负责输出关节消息(sensor_msgs/JointState),并发布/joint_state话题到/move_group和/robot_state_publisher节点。
- robot_state_publisher:接收joint_state_publisher发布的话题消息,并通过tf发布结果到/move_group节点。

有“AI”的1024 = 2048,欢迎大家加入2048 AI社区
更多推荐
 16
16 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)